") 電子科技大學(xué):研究用于機(jī)器人仿生皮膚的三維可拉伸觸覺傳感器
電子科技大學(xué):研究用于機(jī)器人仿生皮膚的三維可拉伸觸覺傳感器

可拉伸觸覺傳感器對(duì)于機(jī)器人仿生皮膚實(shí)現(xiàn)環(huán)境交互和多模態(tài)感知至關(guān)重要。然而,傳統(tǒng)的二維傳感器受限于平面架構(gòu),難以在滑動(dòng)等動(dòng)態(tài)交互中解析復(fù)雜的3D觸覺信息,且現(xiàn)有的3D曲面?zhèn)鞲衅髦圃齑蠖嘁蕾囉趶?fù)雜的轉(zhuǎn)移打印技術(shù),面臨規(guī)模化量產(chǎn)的巨大挑戰(zhàn)。電子科技大學(xué)黃振龍及林淵等研究團(tuán)隊(duì)在《Advanced Materials》上發(fā)表了題為“Three-Dimensional Stretchable Tactile Sensors for Robotic Bionic Skin”的研究論文。該研究受鱷魚皮膚3D褶皺表皮的啟發(fā),提出了一種將3D打印、材料創(chuàng)新與激光直寫技術(shù)相結(jié)合的全新策略,直接在3D基底上構(gòu)建可拉伸觸覺傳感器陣列及無縫多層互連。該系統(tǒng)實(shí)現(xiàn)了低于0.5毫秒的響應(yīng)時(shí)間和高達(dá)473.33 Hz的運(yùn)行頻率,并在亞米級(jí)薄膜上集成了900個(gè)傳感器,結(jié)合深度學(xué)習(xí)實(shí)現(xiàn)了對(duì)復(fù)雜圖案100%的識(shí)別準(zhǔn)確率。
圖注說明

圖 1:固有3D曲面電子皮膚的設(shè)計(jì)與制造。(a) 用于機(jī)器人應(yīng)用的大面積仿生皮膚示意圖;(b) 具有多層架構(gòu)的3D觸覺傳感器示意圖,顯示了層間通過通孔的電氣互連;(c) 在3D曲面上原位生長(zhǎng)金屬傳感層的示意圖;(d) 3D觸覺傳感器的顯微照片;(e) 3D觸覺傳感器的激光掃描共聚焦顯微鏡圖像;(f) 復(fù)雜3D結(jié)構(gòu)的高分辨率X射線圖像;(g) 鱷魚表皮斑點(diǎn)示意圖;(h) 傳感器對(duì)滑動(dòng)運(yùn)動(dòng)響應(yīng)的示意圖;(i) 3D觸覺傳感器在圓柱形表面彎曲的圖像;(j) 大面積傳感器陣列及處于拉伸變形下的陣列圖像;(k) 集成到機(jī)械手上的3D觸覺傳感器圖像。

圖 2:3D觸覺傳感器的性能。(a) 3D觸覺傳感器示意圖;(b) 3D觸覺傳感器詳細(xì)圖像;(c) 頂視SEM圖像和相應(yīng)的EDS圖像;(d) 滑動(dòng)接觸期間3D觸覺傳感器中的模擬應(yīng)變分布;(e) 傳感器在重復(fù)機(jī)械負(fù)載下的循環(huán)性能;(f) 傳感器在垂直法向壓力下的響應(yīng);(g) 使用不同MWCNT濃度制造的傳感器在滑動(dòng)過程中的電阻變化;(h) 敏感區(qū)域位于金字塔結(jié)構(gòu)底部和腰部的傳感器比較;(i) 具有不同微結(jié)構(gòu)高度的傳感器的電阻響應(yīng);(j) 傳感器對(duì)粗糙和精細(xì)周期性紋理的觸覺響應(yīng);(k) 峰值頻率與滑動(dòng)速度之間的線性關(guān)系。

圖 3:自適應(yīng)及高精度紋理方向識(shí)別。(a) 3D觸覺傳感器在周期性紋理上以不同角度滑動(dòng);(b) 峰值頻率對(duì)應(yīng)于平行于紋理方向的滑動(dòng)速度分量;(c) 傳感器相對(duì)于底層紋理表現(xiàn)出角度偏差導(dǎo)致可區(qū)分的光譜峰值差異;(d) 配置用于自適應(yīng)角度識(shí)別的四個(gè)傳感單元示意圖;(e) 使用自適應(yīng)傳感配置進(jìn)行角度識(shí)別的計(jì)算原理示意圖;(f-h) 在以不同角度滑動(dòng)后的四個(gè)傳感單元的頻譜。

圖 4:用于滑動(dòng)路徑重建的傳感器陣列。(a) 用于檢測(cè)滑動(dòng)接觸的3D觸覺傳感器陣列示意圖;(b) 傳感器陣列在拉伸變形下的圖像;(c) 共形附著在圓柱形表面上的傳感器陣列圖像;(d-o) 基于單個(gè)傳感單元電阻映射的滑動(dòng)路徑重建,分別對(duì)應(yīng)“S”、“I”和“A”形軌跡的電阻貼圖、時(shí)域信號(hào)及方向識(shí)別結(jié)果。

圖 5:集成到機(jī)器人中進(jìn)行3D表面識(shí)別。(a) 集成到機(jī)械手中的3D觸覺傳感器的示意圖和照片;(b) 高速多路復(fù)用數(shù)據(jù)采集系統(tǒng)框圖;(c) 3D觸覺傳感器陣列中傳感單元的時(shí)域信號(hào);(d) 單個(gè)傳感單元的時(shí)域信號(hào);(e) 基于滑動(dòng)觸覺數(shù)據(jù)的3D漢字結(jié)構(gòu)重建;(f) 用于識(shí)別復(fù)雜紋理圖案的基于深度學(xué)習(xí)的算法框圖;(g) 使用PCA和k-means聚類對(duì)不同數(shù)據(jù)集的可視化;(h) 基于深度學(xué)習(xí)的識(shí)別結(jié)果,顯示出對(duì)復(fù)雜3D漢字結(jié)構(gòu)的平均準(zhǔn)確率為100%。
總結(jié)
該項(xiàng)技術(shù)突破了傳統(tǒng)平面集成的限制,實(shí)現(xiàn)了向可擴(kuò)展3D制造的跨越。這不僅為開發(fā)具有超高時(shí)空分辨率的下一代機(jī)器人仿生皮膚提供了平臺(tái),也極大拓展了智能感知系統(tǒng)的應(yīng)用邊界。
參考文獻(xiàn):Hongwei Xie, et al. Three-Dimensional Stretchable Tactile Sensors for Robotic Bionic Skin. Advanced Materials, 2026.
來源:國際仿生工程學(xué)會(huì)
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31301瀏覽量
223313 -
仿生皮膚
+關(guān)注
關(guān)注
0文章
4瀏覽量
1283 -
觸覺傳感器
+關(guān)注
關(guān)注
4文章
127瀏覽量
10428
發(fā)布評(píng)論請(qǐng)先 登錄
廣州團(tuán)隊(duì)研制出機(jī)器人“觸覺皮膚”
聯(lián)合光電與桂林電子科技大學(xué)光學(xué)工程學(xué)院簽署校企合作協(xié)議
中國科學(xué)院:在可拉伸曲率傳感器方面取得進(jìn)展
2026電子皮膚賦能具身智能機(jī)器人專題論壇即將召開,共同探索觸覺感知新未來
?深開鴻與電子科技大學(xué)攜手合作,共筑產(chǎn)學(xué)研協(xié)同創(chuàng)新生態(tài)

【“芯”篇章】中星聯(lián)華走進(jìn)高校系列-電子科技大學(xué)站

最新分析:觸覺傳感器技術(shù)演化,電子皮膚市場(chǎng)空間將達(dá)155億元
西安電子科技大學(xué)攜手飛騰助力高校人才培養(yǎng)
電子科技大學(xué)深圳高等研究院領(lǐng)導(dǎo)蒞臨景嘉微調(diào)研考察
西安電子科技大學(xué)師生到訪中科億海微共探FPGA技術(shù)前沿

電子科技大學(xué)OpenHarmony技術(shù)俱樂部正式揭牌成立

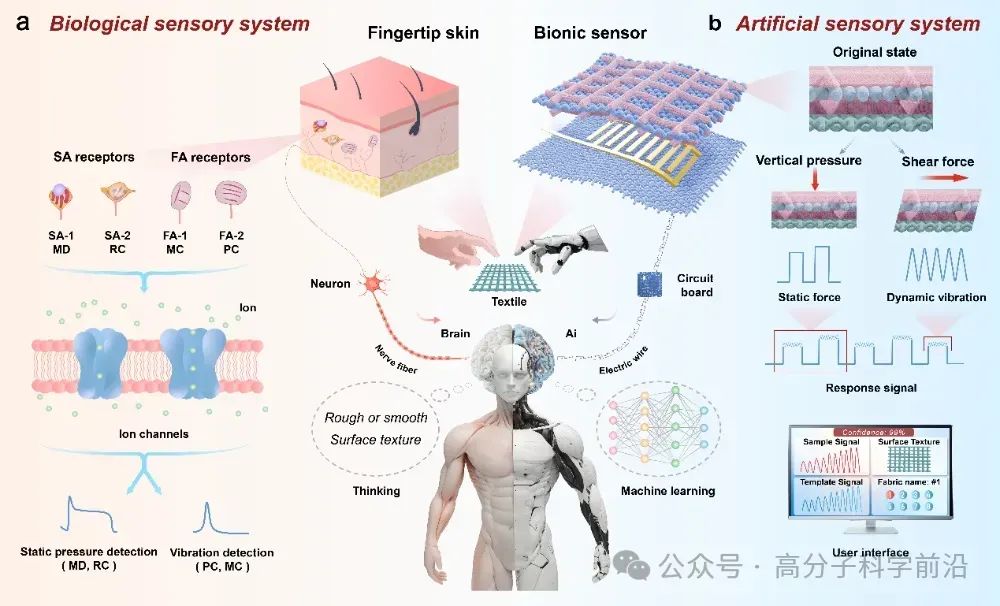
南京工業(yè)大學(xué):仿生觸覺傳感系統(tǒng)讓機(jī)器人擁有“人類指尖”般的細(xì)膩感知
華寶新能與電子科技大學(xué)(深圳)高等研究院共建聯(lián)合實(shí)驗(yàn)室
仿生傳感器:讓機(jī)器擁有“生命感知”的神奇科技
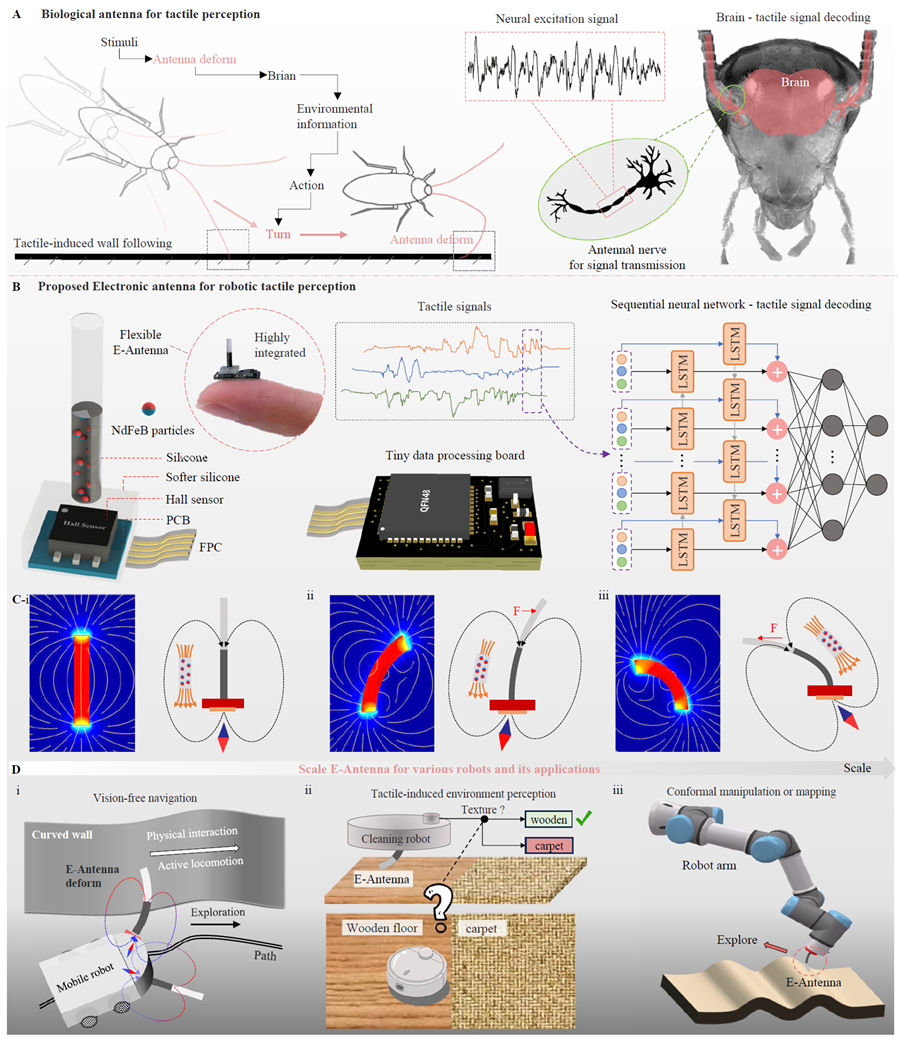
研制仿生電子觸角傳感器,突破無視覺環(huán)境感知瓶頸



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論