 端到端在自動駕駛中起到什么作用?
端到端在自動駕駛中起到什么作用?

[首發于智駕最前沿微信公眾號]隨著自動駕駛技術的發展,端到端憑借其獨特優勢,被越來越多企業所推崇。所謂端到端,就是把從傳感器(比如攝像頭、雷達)到車輛動作(轉向、油門、剎車)這條鏈條交給學習模型去“整體”學會,而不是把問題拆成一大堆由人寫規則的子模塊。端到端分為狹義端到端與廣義端到端,狹義端到端指通過單一神經網絡將原始信號直接映射為控制指令;廣義端到端則更強調信息在流程中盡可能保持原始形態、減少人為壓縮,并通過數據驅動實現整體目標,即使中間仍存在部分工程接口。
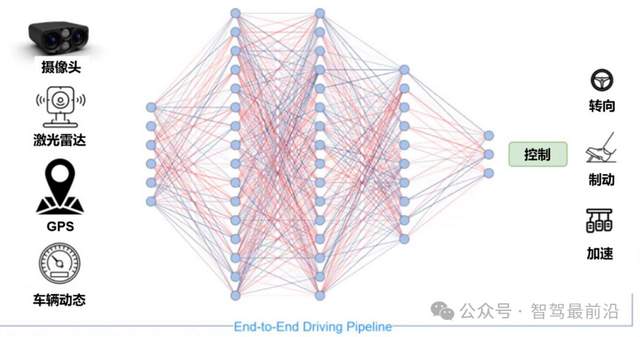
狹義端到端自動駕駛架構(單一神經網絡模型實現感知、決策規劃、控制)
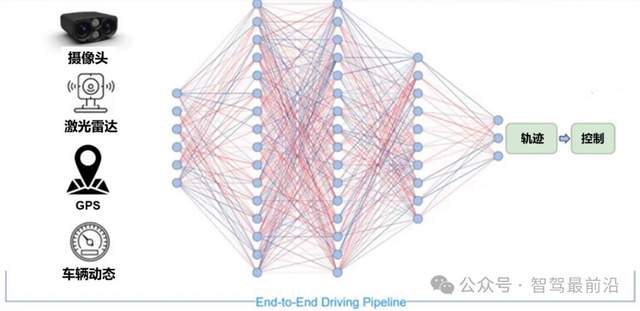
廣義端到端自動駕駛架構(神經網絡模型實現感知與決策規劃,不包括控制模塊)
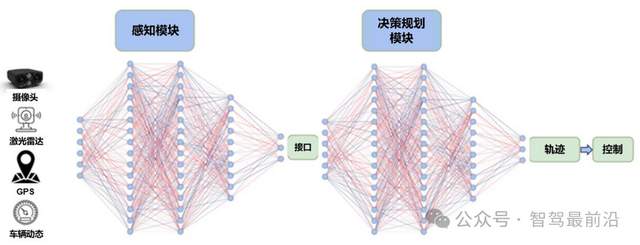
廣義端到端自動駕駛架構(感知和決策規劃使用神經網絡,模塊之間仍有人工設計的數據接口)
用更直白的話來理解,傳統自動駕駛像把一輛車拆成感知、定位、預測、規劃、控制幾個模塊,每個模塊單獨優化再接在一起;端到端的想法是,讓一張大網學會從輸入到輸出的整體映射,用數據告訴它“這樣做就是好”的標準,而不是每一步都由工程師給出規則,然后根據規則去完成操作。

感知那塊到底發生了什么變化?
在早期的自動駕駛系統中,感知任務主要集中于二維或三維檢測,其目標是識別圖像中的物體(如車輛、行人、車道線),并將這些帶有標簽的邊界框提供給下游模塊。然而,這種以“框”為核心的數據形式,與后續的路徑規劃模塊之間存在語義隔閡。
近年來,一種主流趨勢是將多攝像頭、多傳感器的數據統一投影到一個共同的“鳥瞰圖”(BEV)空間中。BEV通過將不同視角的信息融合進一個統一的、具備空間一致性的坐標系,極大地便利了路徑規劃與動態信息的融合。因此,BEV的普及實質上重塑了感知與規劃之間的接口,使其更易于被端到端的學習模型所理解與利用。
但BEV仍是二維的,缺乏高度信息。于是有方案提出把表示能力往三維擴展,引入“占用網絡”(Occupancy,簡稱OCC)這樣的稠密時空場表示。占用網絡不是簡單地提供“這里有個車”這樣的數據,而是把“某個空間點在未來若干幀里被什么占著、有多大概率被占著”等數據給厘清出,它把時間維、空間維和不確定性都納進來,對動態交互的建模更友好。
現階段,“世界模型”的概念越來越火熱,其核心思想是構建一個能夠重建并推演世界動態的模型,讓系統不僅能“看到現在”,還能“想象未來會發生什么”。世界模型既能用于生成訓練數據(彌補真實長尾樣本短缺),也能在決策時作為內部仿真器來評估不同動作的后果。世界模型不僅是感知/認知能力升級的工具,也是端到端訓練和驗證的重要補充,但也要注意,如果世界模型生成的數據與真實世界分布差別太大,也會誤導訓練。
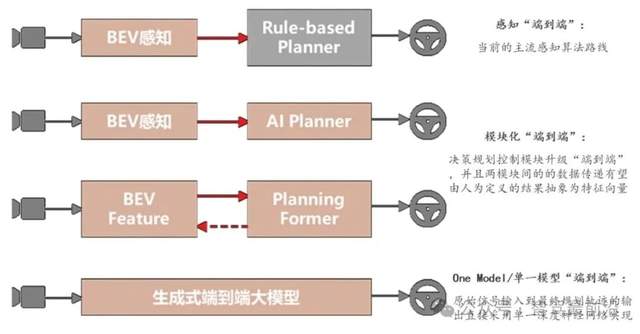
端到端自動駕駛架構演進示意圖

決策層怎么學?
完成環境感知后,如何將決策規劃交由學習模型,主要有幾種路徑,其一是模仿學習,通過擬合人類駕駛數據來快速獲得基礎能力,但泛化性不足,在偏離示范數據時表現不佳;其二是強化學習,通過試錯學得魯棒策略,但依賴仿真環境以規避現實風險;結合二者優勢的路徑也頗為常見,先用模仿學習初始化模型,再通過強化學習在仿真中優化長期收益。報告將這些方法均視為實現端到端決策的候選方案。
世界模型在決策層扮演著關鍵角色,它能夠基于當前狀態,在模型內部生成多種合理的未來場景,從而輔助決策模塊進行“前瞻性思考”。這意味著系統無需在現實世界中反復試錯,而是可以在其內部模擬環境中評估不同動作的潛在后果,進而選擇更安全、更有效的策略。這一機制對于處理長尾和極端場景具有重要價值,但若生成場景與真實世界分布存在顯著偏差,也可能引入決策風險,因此必須審慎使用生成數據。
此外,還有一種折中路徑,便是“模塊化端到端”。該方案在感知端使用神經網絡輸出豐富的中間表征(如BEV特征或時空占用場),而在決策與控制層則保留或并行運行一個相對輕量且可解釋的模型。模塊之間通過特征向量進行交互,而非依賴人類可讀的標簽。這種方式在工程實踐中更易于驗證與調試,因此被不少國內廠商視為當前階段向全端到端系統過渡的可行方案。

工程上必須面對的硬問題有哪些?
想將端到端自動駕駛從技術推導走向大規模量產,必須跨越數據、算力、驗證、可解釋性與持續學習等一系列現實瓶頸。這些挑戰共同構成了當前技術落地的主要門檻,也決定了產業競爭的焦點與節奏。
端到端模型對數據的規模、質量及長尾場景覆蓋度均有極高要求。與語言模型可依賴海量公開文本不同,自動駕駛需依賴大量真實行車視頻、車輛狀態及對應的人類駕駛行為數據,且必須覆蓋夜間、雨雪、施工區、臨時障礙物等稀有場景。特斯拉目前在數據規模上就具備領先優勢,其通過影子模式、自動標注與回放訓練構建了高效的數據閉環系統。
端到端訓練還遵循“規模法則”,更大的模型、更多的數據與更長的訓練時間通常帶來性能提升,這推動了對大規模云端GPU集群的投入。車端與云端算力作為自動駕駛行業關鍵競爭要素,車端需滿足低延遲與高可靠性,而云端則承擔大規模訓練任務,目前多數團隊需依賴千卡級別的訓練資源。
驗證是端到端需要面對的另一大難題。端到端系統難以僅通過傳統離線指標評估真實表現。開環(離線)評估通過對比模型輸出與人類軌跡,雖簡便但缺乏交互性檢驗;閉環(在線)仿真可測試系統的交互與恢復能力,但構建高保真、覆蓋長尾場景的仿真環境本身即為挑戰。可通過構建融合離線評估、閉環仿真與真實世界影子測試/漸進推送的驗證體系,世界模型雖可部分填補長尾數據空白,但其生成偏差帶來的驗證風險不容忽視。
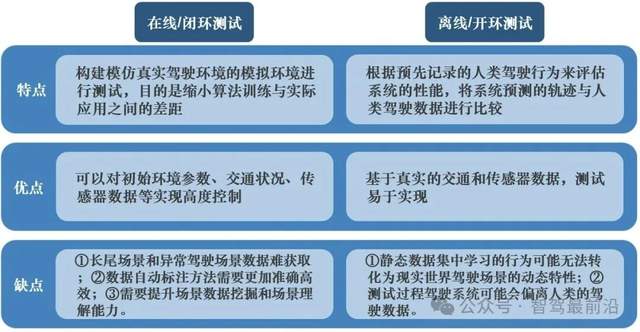
在線/閉環測試與離線/開環測試的主要特點與優缺點
可解釋性與災難性遺忘是端到端不可不避免的兩個問題。端到端模型天然具有“黑盒”屬性,工程落地與監管合規均要求理解“模型為何做出特定決策”,尤其在事故或異常情況下需具備追溯能力。對于這個問題可以應對的策略包括并聯視覺語言模型(將中間表征轉化為可讀描述)、模塊化檢查點設計,以及在訓練中引入規則約束等。在災難性遺忘方面,當模型使用新數據微調以改進特定復雜場景時,可能削弱原有能力,實踐中已出現版本回退案例。對此的緩解手段包括舊樣本回放、權重固化等技術。

技術方向上的差異
在技術路徑選擇上,行業呈現出不同的演進策略。特斯拉堅持純視覺方案,基于BEV+Transformer+占用網絡構建單一端到端模型,依托海量影子模式數據和回放訓練機制實現快速迭代。而國內主流廠商如華為、小鵬、理想等則普遍采用“模塊化端到端”或“雙系統”架構,在追求性能上限的同時,保留系統的可解釋性與應急處理能力。
需要明確的是,技術落地不僅需要前沿的理念,更依賴扎實的工程化基礎。其中,數據閉環的效率、算力部署的規模與驗證體系的完備性,共同構成了端到端系統能否穩定落地并持續演進的關鍵支撐。正因如此,“數據+算力”才是端到端競爭的核心要素,這也是為何具備資源優勢的頭部企業,在端到端落地的進程中能夠保持明顯的先發優勢。

最后的話
端到端自動駕駛的實現依賴于完整的技術鏈條,感知層面從傳統檢測向BEV和時空占用網絡演進,為決策提供更豐富的環境表征;決策層面結合模仿學習、強化學習和世界模型推演,使系統具備預測與規劃能力;工程落地則依靠數據閉環、算力集群和多重驗證體系作為支撐,同時必須解決模型可解釋性與災難性遺忘等現實挑戰。當前技術發展仍受數據質量與算力規模的關鍵制約,這也決定了端到端系統從概念驗證到量產落地的實際進程。
審核編輯 黃宇
-
端到端
+關注
關注
0文章
49瀏覽量
10833 -
自動駕駛
+關注
關注
793文章
14879瀏覽量
179778
發布評論請先 登錄

如何訓練好自動駕駛端到端模型?

一文讀懂特斯拉自動駕駛FSD從輔助到端到端的演進


端到端自動駕駛相較傳統自動駕駛到底有何提升?

Nullmax端到端自動駕駛最新研究成果入選ICCV 2025

為什么自動駕駛端到端大模型有黑盒特性?

端到端數據標注方案在自動駕駛領域的應用優勢

自動駕駛中基于規則的決策和端到端大模型有何區別?

東風汽車推出端到端自動駕駛開源數據集
動量感知規劃的端到端自動駕駛框架MomAD解析

DiffusionDrive首次在端到端自動駕駛中引入擴散模型




 工商網監
工商網監
評論