 NVIDIA神經網絡創新研究重塑機器人學習
NVIDIA神經網絡創新研究重塑機器人學習

目前,機器人在受控的環境中能夠有出色的表現,但在面對現實世界任務時,仍難以應對其中的不可預測性、操作靈活性和細微的交互需求,例如組裝精密組件或是以接近人類的精度操控日常物體。
機器人學習已成為彌合實驗室演示與現實世界部署之間差距的關鍵推動力。
本期NVIDIA 機器人研究與開發摘要 (R2D2)將探討 NVIDIA 研究中心在 CoRL 2025 上展示的三項突破性的神經網絡創新研究,這些研究正在重塑機器人的學習與適應方式:
NeRD(神經機器人動力學模型):通過具備跨任務泛化能力的學習型動力學模型增強仿真效果,同時支持在真實環境中對模型微調。
Dexplore:將動作捕捉演示數據作為自適應引導信息,幫助機器人實現人類級別的靈巧操作能力。
VT-Refine:融合視覺感知與觸覺傳感技術,通過創新的“真實—仿真—真實”(real-to-sim-to-real)訓練流程,使機器人熟練掌握高精度雙手協同裝配任務。
通過神經仿真推動機器人學習:現代機器人普遍具有高自由度和復雜的機械結構,傳統仿真器難以準確捕捉其復雜性。神經模型能夠高效預測復雜的動力學行為,并適應現實世界的數據,有助于應對這一挑戰。
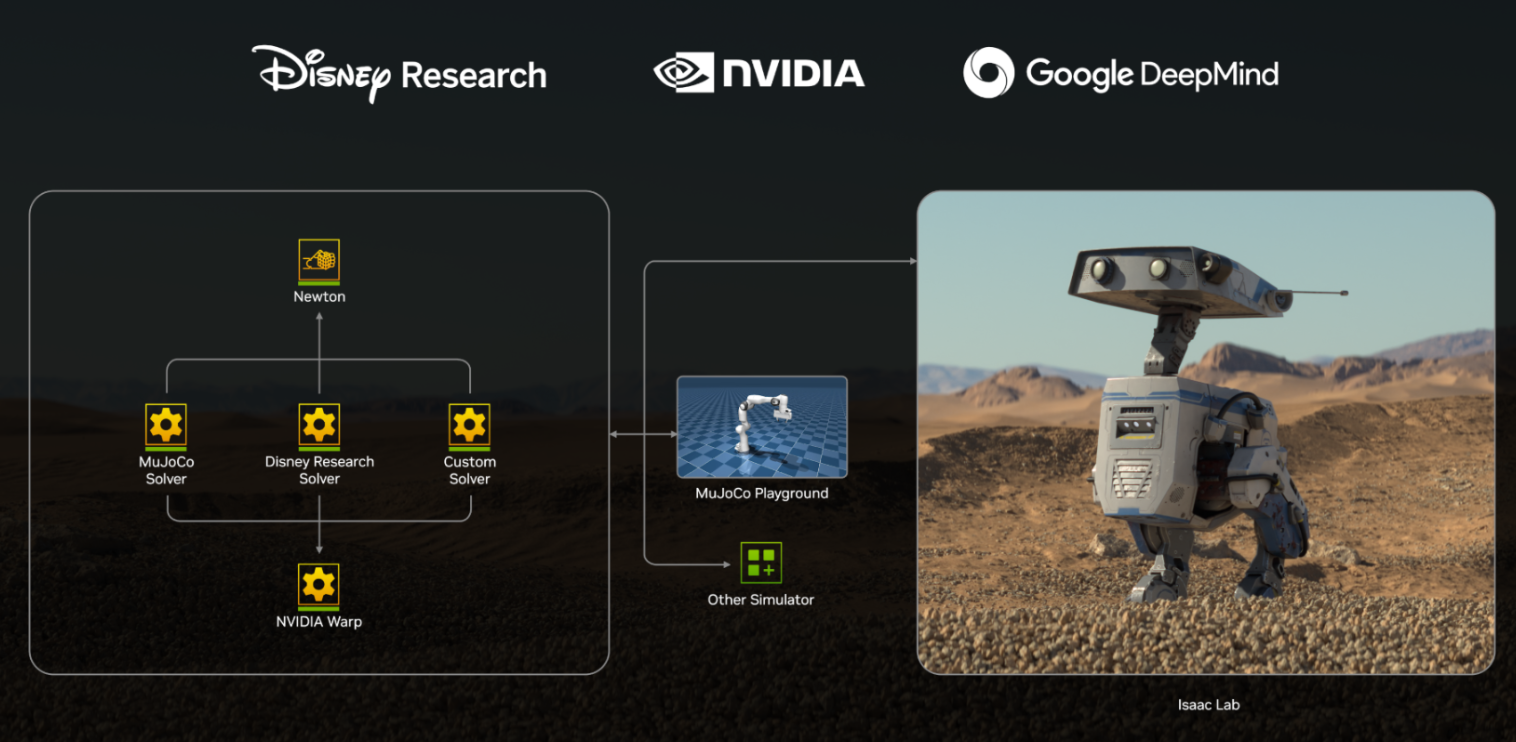
NeRD 是經過學習的動力學模型,能夠預測特定機器人(或稱鉸接剛體系統)在接觸約束下的未來狀態。該模型能夠替代分析仿真器中的低層動力學與接觸求解器,從而構建一種混合仿真預測框架。NeRD 可輕松集成到現有的鉸接剛體仿真框架中,可作為Newton等物理引擎的無縫接入后端。
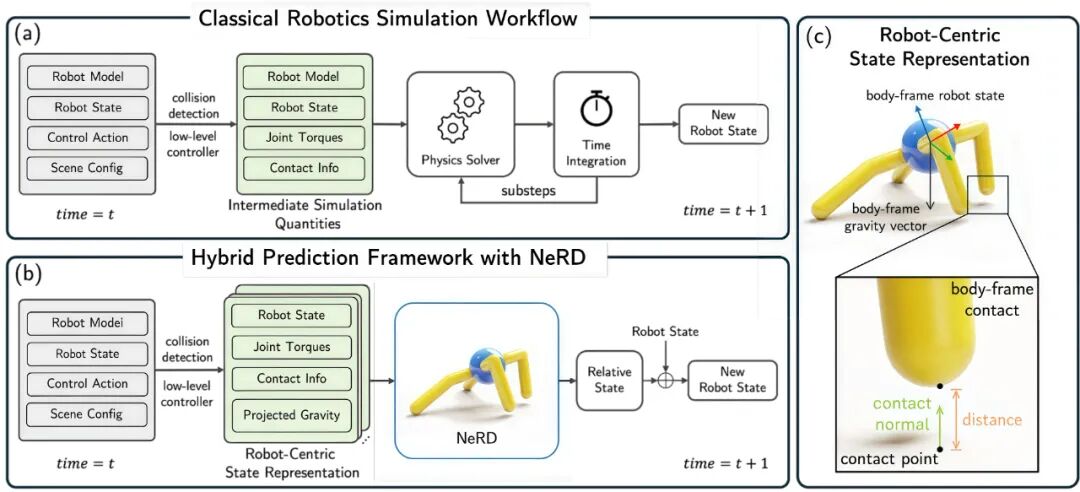
NeRD 可以高效預測復雜的動力學行為并適應真實世界的數據
從人類運動中學習靈巧技能:機器人的手部通常自由度較低且驅動、感知與控制能力有限,這使得機器人難以有效地從人類操作中學習靈巧的操作技能。
手與物體動作捕捉(MoCap)存儲庫提供了豐富的接觸密集操作的人類演示,但它們難以直接用于機器人的策略學習。
本研究提出了參考范圍探索(RSE),一種統一的單循環優化方法。它融合了重定向與跟蹤功能,能夠直接利用運動捕捉(MoCap)數據來訓練可擴展的機器人控制策略。這種做法不僅保留了演示的意圖,并使機器人能夠自主探索與其自身形態相契合的動作。
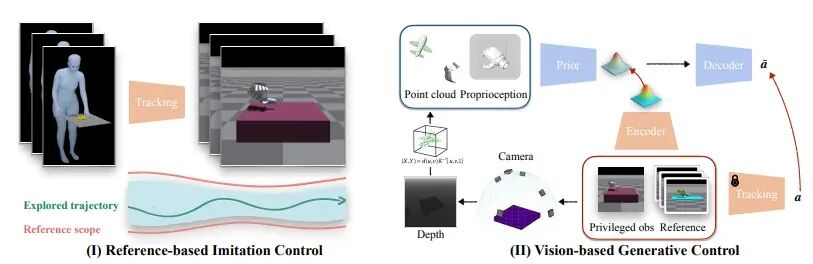
從人類演示中學習靈巧操作,首先使用RSE訓練一個基于狀態的模仿控制策略,進而探索機器人專屬的操作策略
視覺與觸覺相結合,實現雙手協同裝配:基于擴散策略的行為克隆方法面臨兩大局限,即在現實世界中,演示數據有限,且數據采集接口的觸覺反饋也較為有限。
為解決這一數據難題,VT-Refine 開發了一種創新的“真實—仿真—真實”框架。該框架融合了仿真、視覺與觸覺信息,可有效應對雙手協同裝配任務中的挑戰。
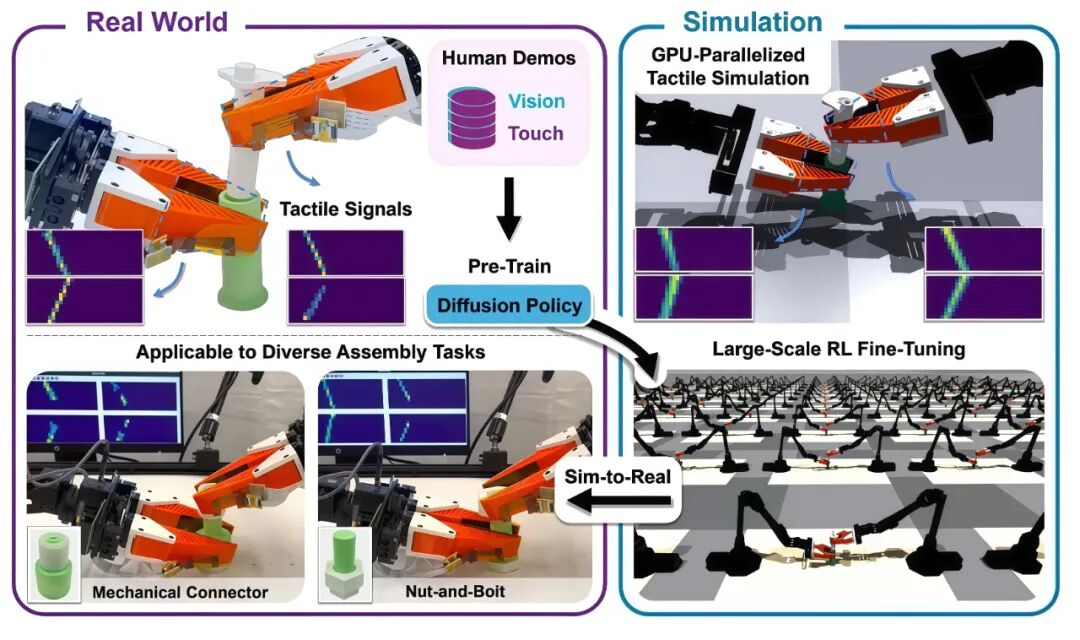
VT-Refine 是一種創新的視覺觸覺策略學習框架,適用于高精確、接觸密集型的雙手協同裝配任務
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
神經網絡
+關注
關注
42文章
4838瀏覽量
107742 -
NVIDIA
+關注
關注
14文章
5592瀏覽量
109711
原文標題:R2D2:NVIDIA 研究中心的三項神經學突破重塑機器人學習
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

NMSIS神經網絡庫使用介紹
NVIDIA開源物理引擎與OpenUSD加速機器人學習
NVIDIA 發布三大利器,推動人形機器人邁向新紀元
NVIDIA Isaac Lab多GPU多節點訓練指南

如何在機器視覺中部署深度學習神經網絡
NVIDIA展示機器人領域的研究成果
NVIDIA Isaac Lab可用環境與強化學習腳本使用指南

通過NVIDIA Cosmos模型增強機器人學習

NVIDIA Isaac Sim和Isaac Lab現已推出早期開發者預覽版
無刷電機小波神經網絡轉子位置檢測方法的研究
神經網絡RAS在異步電機轉速估計中的仿真研究
NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
NVIDIA實現神經網絡渲染技術的突破性增強功能
深度解讀英偉達Newton機器人平臺:技術革新與跨界生態構建



 工商網監
工商網監
評論