 智能網聯汽車測試場景覆蓋度分析
智能網聯汽車測試場景覆蓋度分析

01引言
場景是智能網聯汽車安全測試技術的基礎,是開展安全測試評估的重要前提。為了確保智能網聯汽車產品測試驗證結果具備足夠的覆蓋度,需要構建基于場景的測試評估體系,對系統及其功能進行全面評估,從而系統、客觀地反映車輛產品的安全狀況。
2021年7月,工業和信息化部發布《關于加強智能網聯汽車生產企業及產品準入管理的意見》,2023年11月,工業和信息化部、公安部、住房和城鄉建設部、交通運輸部四部委聯合發布《關于開展智能網聯汽車準入和上路通行試點工作的通知》,明確智能網聯汽車產品應符合模擬仿真、封閉場地、實際道路等測試驗證要求,并對測試場景的覆蓋度提出了相關要求,以有效地驗證自動駕駛系統安全。
2025年2月,工業和信息化部、市場監管總局聯合發布了《關于進一步加強智能網聯汽車產品準入、召回及軟件在線升級管理的通知》,提出針對系統邊界和安全響應、控制策略、人機交互等方面,通過模擬仿真、封閉場地、實際道路等測試方法開展充分測試,確保智能網聯汽車產品滿足安全要求。
隨著智能網聯汽車駕駛自動化功能的快速迭代,測試場景的覆蓋度評估已成為保障系統安全驗證的核心環節。對此,本文系統研究了基于智能網聯汽車功能與設計運行條件(ODC)的測試場景覆蓋度分析方法,并構建測試場景覆蓋度量化評價體系,為實現高效、全面的駕駛自動化功能測試提供支持和實踐參考。
02測試場景覆蓋度分析框架
為保證搭載駕駛自動化系統的智能網聯汽車產品的功能和性能得到充分測試驗證,基于系統功能定義及ODC分析測試場景覆蓋度,確認測試用例集合的全面性與有效性。針對駕駛自動化系統的安全要求,其測試場景覆蓋度分析可基于以下分層維度展開:
動態駕駛任務執行
特性:與系統設計運行范圍(以下簡稱ODD)強關聯,例如道路、目標物、天氣環境等。
分析路徑:需獨立構建測試場景庫,通過ODD要素組合驗證功能邊界。
動態駕駛任務后援與人機交互
特性:以安全要求為導向,例如系統控制策略和提示信息。
分析路徑:可合并為一類,基于預設安全標準設計測試用例并評估覆蓋度。
2.1 動態駕駛任務執行能力
基于系統的動態駕駛任務執行能力驗證,其測試場景覆蓋度分析流程主要包括“ODD元素覆蓋度分析”和“功能測試用例覆蓋度分析”兩條路徑,分析流程如圖1所示。
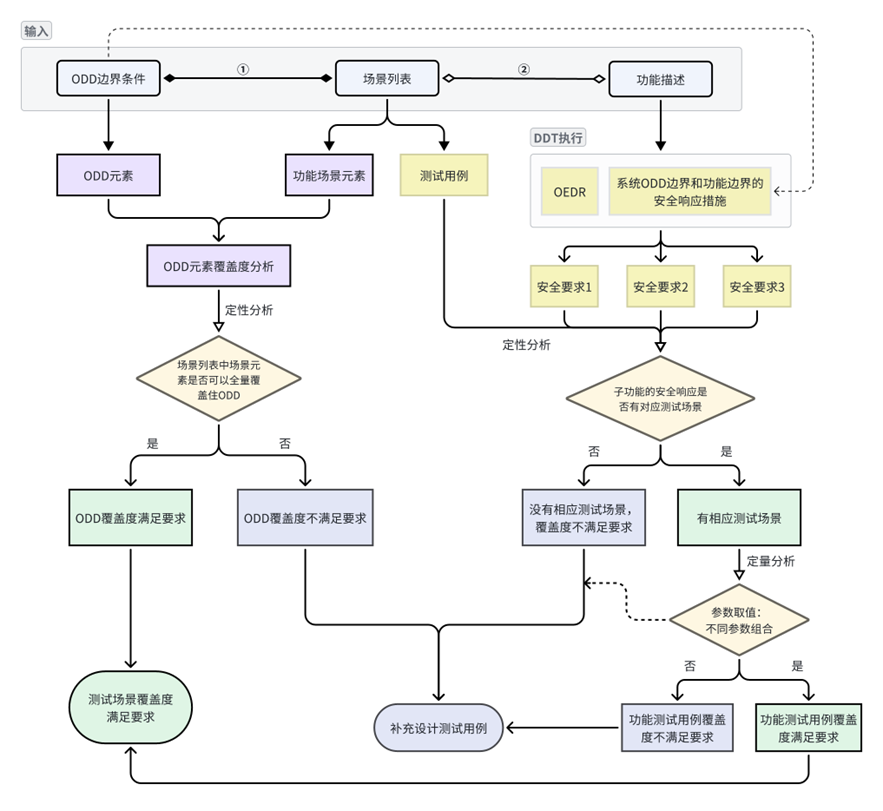
圖1 DDT執行-測試場景覆蓋度分析流程
(1)ODD元素覆蓋度分析:ODD邊界條件與場景列表映射(即圖中①),針對ODD元素和功能場景元素匹配度,開展定性分析。若場景列表中場景元素可以全量覆蓋ODD,則ODD元素覆蓋度滿足要求;若場景列表中場景元素無法全量覆蓋ODD,則ODD元素覆蓋度不滿足要求。
(2)功能測試用例覆蓋度分析:功能描述與場景列表映射(即圖中②),針對系統的目標和事件探測與響應能力,結合系統ODD邊界和功能邊界的安全響應措施,面向系統安全要求與測試用例的匹配度,開展定性分析。
○若具備相應測試用例,則進入下一步定量分析,判斷參數組合是否滿足“關鍵參數充分泛化”的原則。如是,則功能測試用例覆蓋度滿足要求;如不是,則功能測試用例覆蓋度不滿足要求。
○若不具備相應測試用例,則功能測試用例覆蓋度不滿足要求。
針對(1)和(2)中覆蓋度不滿足的情況,需要進一步補充設計測試用例。
2.2 動態駕駛任務后援和人機交互能力
基于系統的動態駕駛任務后援和人機交互能力驗證,其測試場景覆蓋度分析流程如圖2所示。
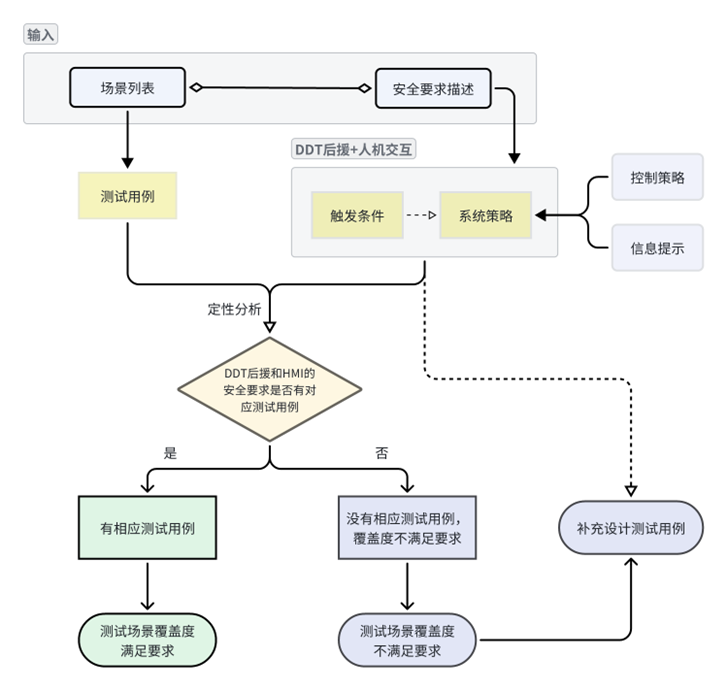
圖2 DDT后援&HMI-測試場景覆蓋度分析流程
(1)根據系統安全要求描述,分解得到功能觸發條件與相應的系統策略,其中系統策略包括“系統執行的控制策略”和“對駕駛員的信息提示”兩方面;
(2)將安全要求與場景列表進行映射,針對“觸發條件和系統策略”與測試用例的匹配度,開展定性分析。
○若具備相應測試用例,則測試場景覆蓋度滿足要求;
○若不具備相應測試用例,則測試場景覆蓋度不滿足要求。
針對(2)中覆蓋度不滿足的情況,需要結合(1)的分析結果,進一步補充設計測試用例。
03測試場景要素參數組合
針對2.1動態駕駛任務執行能力中“功能測試用例覆蓋度分析”階段,本文提出一種場景要素參數組合方法,為測試用例的定性/定量分析和補充設計提供參考。場景要素參數組合分析思路如圖3所示。
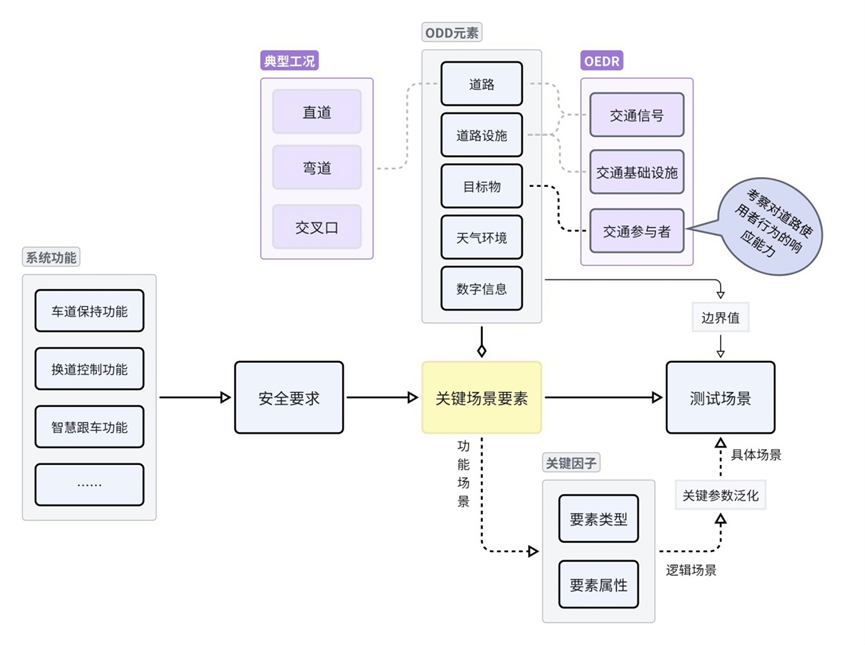
圖3 測試場景要素參數組合分析流程
首先,基于系統不同功能的功能需求和安全要求,篩選與待測功能強相關的ODD元素作為關鍵場景要素,通過測試矩陣的形式,得到功能測試場景;其次,定義場景要素關鍵參數(關鍵因子),即對安全要求影響較大的參數,并確定場景要素類型和屬性,在系統設計運行范圍內取值并進行排列組合,泛化形成具體測試場景。
賽目科技Safety Pro工具可泛化千萬個已知危險場景和未知危險場景,確保場景覆蓋度能支撐安全驗證需求
在測試場景設計過程中,為驗證智能網聯汽車產品在系統ODD和功能邊界范圍內的動態駕駛任務執行能力,以及探測和響應系統邊界的能力,建議考慮以下幾點開展測試用例設計:
(1)針對系統ODD邊界和功能邊界測試,場景的設計應考慮待測系統對外部環境條件變化或場景要素狀態變化的響應能力,從而驗證系統達到ODD邊界或功能邊界時的控制策略。
(2)針對目標物的識別測試,由于道路結構對于系統的決策及控制策略有關鍵影響,因此為全面驗證系統對其他道路使用者行為的響應能力,應基于不同道路結構設計典型工況,結合交通參與者關鍵屬性,即“ODD要素+目標物行為”的測試矩陣進行綜合場景構建。對于目標物位置和行為的基礎分類示例如表1所示。
(3)針對關鍵因子選取,若關鍵場景要素類型中包含目標物層級,則對應的要素屬性還應考慮行為特征參數取值,明確各要素間的相關性影響。
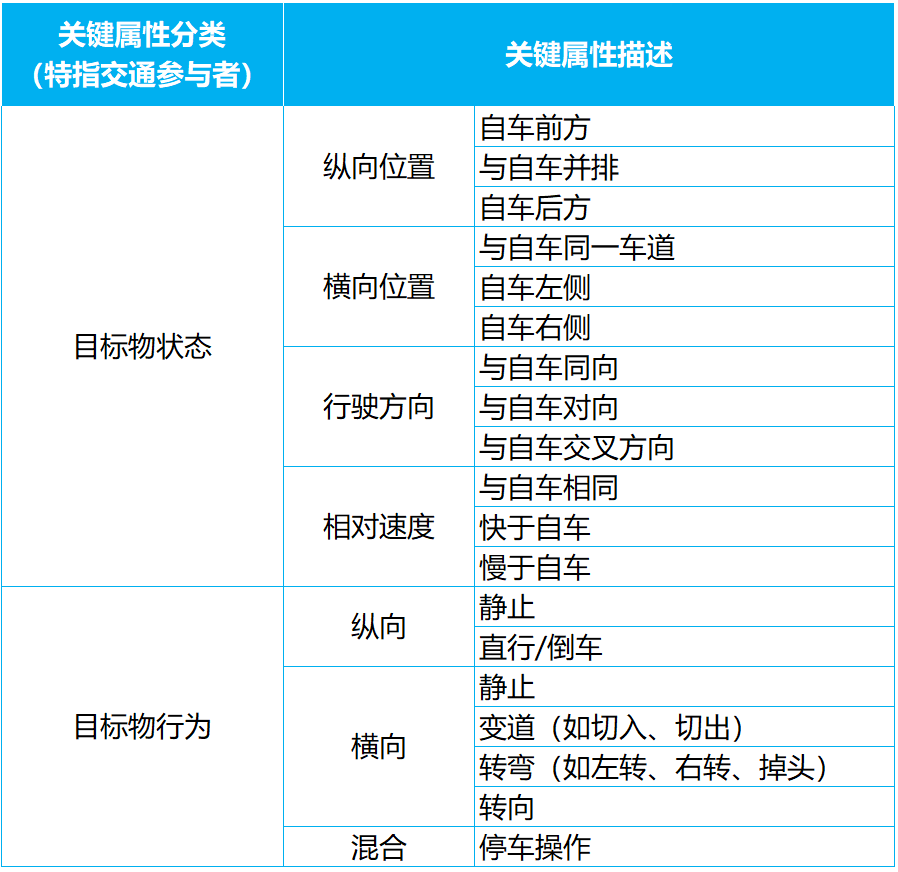
表1 目標物要素關鍵屬性示例
基于上述方法論,以車道保持功能為例,按照“系統功能→關鍵場景要素→關鍵因子”的順序展開分析。
根據車道保持功能定義與ODD,確定關鍵場景要素為道路幾何、車道線或道路邊緣類型、交通參與者的狀態和行為,具體如表2所示。
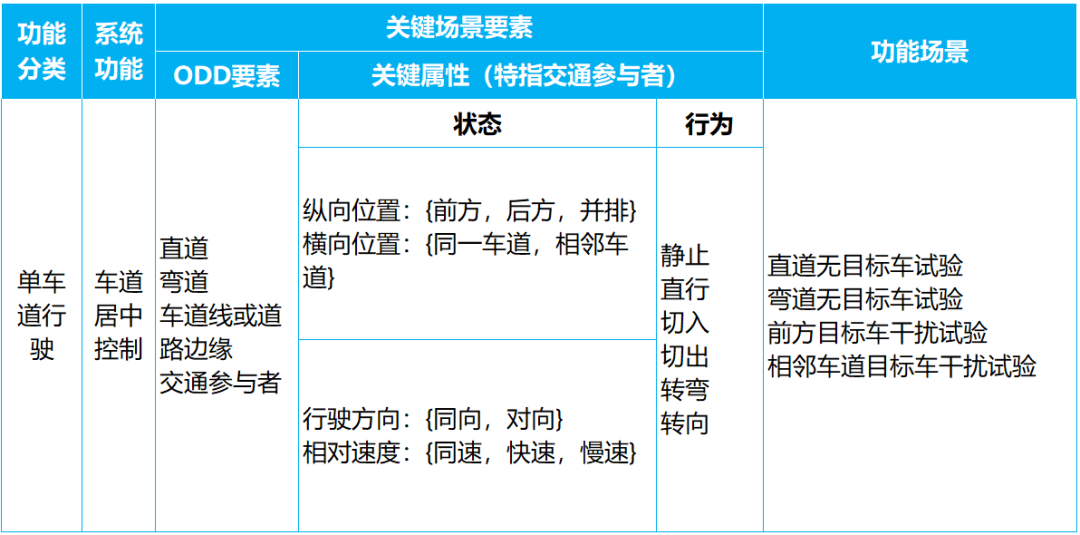
表2 功能關鍵場景要素映射表
將測試場景中對安全要求影響較大的參數定義為關鍵因子,并確定場景要素關鍵參數取值范圍。
針對無目標車干擾類測試,主要基于道路要素設計場景,以彎道無目標車試驗場景為例,選取彎道曲率半徑、彎道長度、車道線類型、車道線丟失情況、車道線丟失長度等參數作為關鍵因子;
針對目標車輛干擾類測試,主要基于道路要素和交通參與者要素綜合構建場景,以前方目標車輛干擾試驗為例,選取目標車輛類型、目標車輛初始速度、目標車輛(轉向)橫向偏置距離、目標車輛轉向/切出動作持續時間等參數作為關鍵因子,測試矩陣如表3所示。
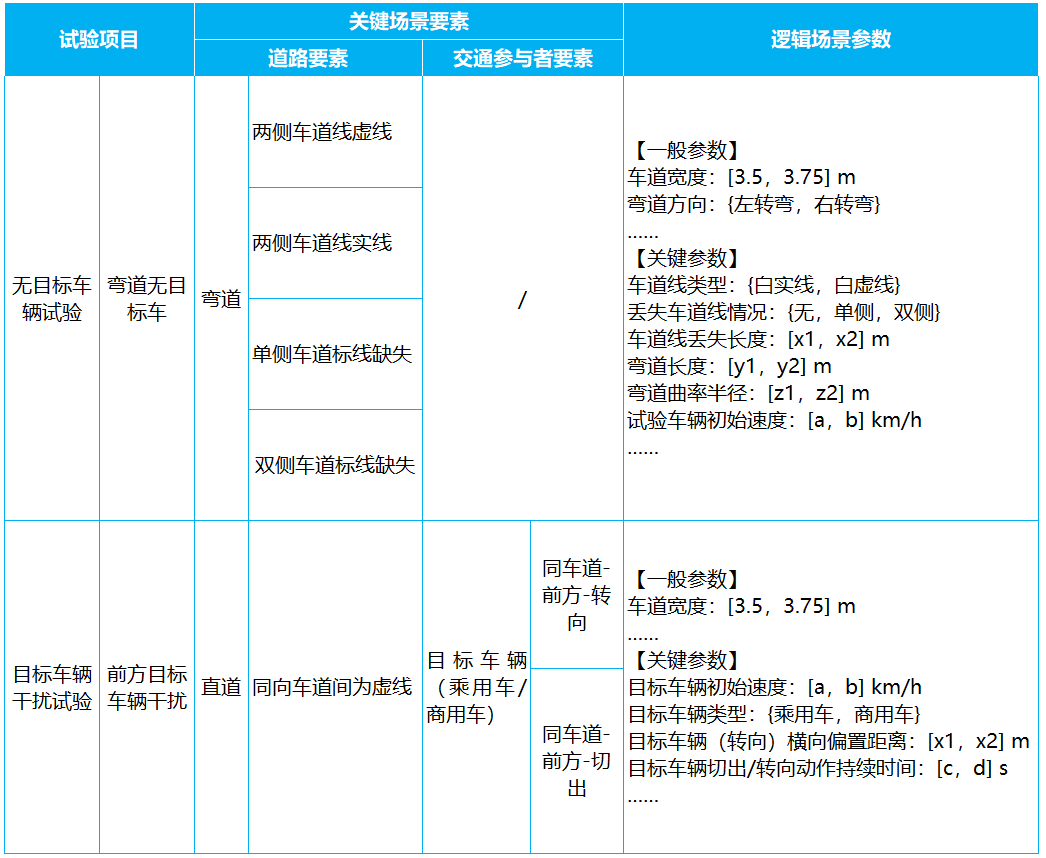
表3 邏輯場景要素參數組合示例
04測試場景覆蓋度量化評價方法
在第二章測試場景覆蓋度分析框架基礎上,本小節提出一種“層次分析法+加權求和法”的覆蓋度評價流程,如圖4所示。內容主要包括:覆蓋度指標分層、指標層權重分配、單一指標計算、綜合覆蓋度評估、場景覆蓋度評級等步驟,將覆蓋度從主觀分析描述轉化為可直觀呈現的量化指標,為測試場景集的動態優化及合規性認證提供可量化的決策依據與實踐參考。
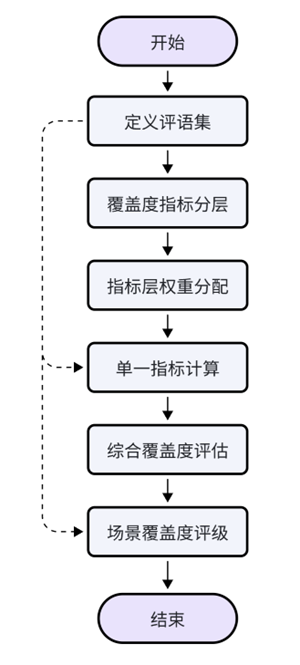
圖4 場景覆蓋度評價流程圖
(1)定義評語集:建立覆蓋度評語V={優,良,中,差} 共4個等級用于單一指標和綜合結果評級。
(2)覆蓋度指標分層:對測試場景覆蓋度建立層次分析模型,建立指標集S={A,B , … ,n}。
(3)指標層權重分配:構建指標矩陣,確定權重集W={W?,W? , … ,W?}。
(4)單一指標計算:量化單一指標覆蓋度,對于單一指標分別計算其覆蓋程度。
(5)綜合覆蓋度評估:將單一指標的覆蓋度按照權重分配合并,得到最終整體量化覆蓋度指標。
4.1 覆蓋度評價分級
評語集是對各個指標做出的評價結果所組成的集合,用于最后的評級。本文對覆蓋度進行以下四個等級劃分,如表4所示。

表4 覆蓋度評價等級
4.2 確定指標權值
模糊層次分析法(Fuzzy analytic hierarchy process,FAHP)是在傳統層次分析法(AHP)基礎上,結合模糊集理論發展而來的一種多準則決策方法,它能夠有效處理決策問題中的不確定性和模糊性,廣泛應用于學術研究和實際決策中。由于測試場景覆蓋度評估也是一個多指標、多因素的評價問題,因此可以借鑒FAHP的思想來評估各個指標的重要性,進行指標權重的分配與驗證,具體流程如圖5所示。
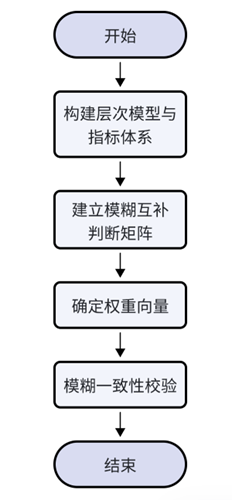
圖5 FAHP分析流程圖
1、層次模型與指標體系
將指標體系劃分為S(目標層)和A/B(指標層)兩層,建立指標集S={A,B},如圖6所示。
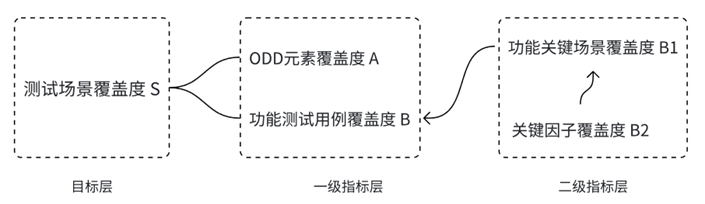
圖6 場景覆蓋度評價指標體系層次結構
2、模糊互補判斷矩陣
模糊層次分析法中,對同一層級的評價指標兩兩比較判斷時,采用一個因素比另一個因素的重要程度來定量表示。可依據表5中0.1~0.9標度法進行數據標度,得到模糊互補判斷矩陣
(i,j=1,2,…,n),其中r??為對角線上的元素,均為0.5,表示因素i與其自身相比同等重要,且r?? + r??=1。
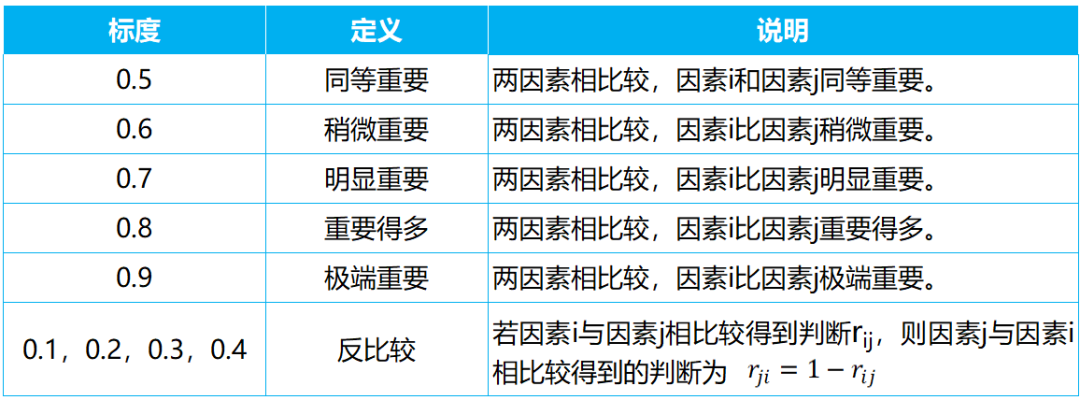
表5 0.1~0.9標度法
針對測試場景覆蓋度評價指標層,根據以下權重分配原則,綜合考量構建模糊互補矩陣,如公式(1)所示。
○安全關鍵性:哪個指標下覆蓋的場景對安全更關鍵,則權重更高;
○分析成本:哪個指標分析過程中考慮的因素更多,則權重更高;
○專家經驗:基于領域知識判斷哪個指標更能代表“真實覆蓋”,則權重更高。
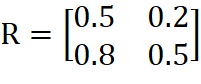
公式(1)
3、權重向量
基于公式(1)的模糊互補判斷矩陣,可計算得到指標層的權重向量,確定權重集W={W?,W? }。A的權重為W?,B的權重為W?,且W?+W?=1。權重公式如(2)所示。
公式(2)
式中,W ? 為因素 ? 的權重。
由公式(2)可計算得到指標層的權重集W={0.35,0.65 },即W?=0.35,W?=0.65。
4、一致性檢驗
為判斷根據公式(2)求得的權重值是否合理,利用模糊判斷矩陣的相容性指標進行一致性檢驗,其表達式如公式(3)所示。若相容性指標值小于特定閾值α(一般取α=0.1),則可認為判斷矩陣為滿意一致矩陣。α越小,表明決策者對模糊判斷矩陣的一致性要求越高。
公式(3)
公式(4)
公式(5)
式中:
Ι(R,W) ——判斷矩陣R與其特征矩陣W的相容性;
W?? ——特征矩陣元素;
W ——判斷矩陣R的特征矩陣。
根據公式(4)~(5)可構建模糊互補判斷矩陣R的特征矩陣
由公式(3)可進一步計算得到判斷矩陣與特征矩陣的相容度為 Ι(R,W) =0.075<0.1,因此可認為將權重集W={0.35,0.65 }作為指標層A和B的權重分配是合理的。
4.3覆蓋度評級
基于4.2中提出的場景覆蓋度評價指標體系,本小節針對指標A“ODD元素覆蓋度”和指標B“功能測試用例覆蓋度”,采用百分制評分法對單一路徑進行獨立量化評估。
4.3.1 ODD元素覆蓋度評級
參考GB/T 45312-2025《智能網聯汽車 自動駕駛系統設計運行條件》中關于ODD元素的分級規范,依據產品設計運行條件的描述,對測試場景集中各場景元素進行映射與匹配分析,并基于公式(6)和(7)分別計算各元素層級下的覆蓋度及整體ODD元素總覆蓋度。在此基礎上,可進一步結合表1對計算結果實施二次分級評定,從而更直觀地反映ODD元素的覆蓋水平。
公式(6)
公式(7)
ODD元素覆蓋度評價矩陣如表6所示。
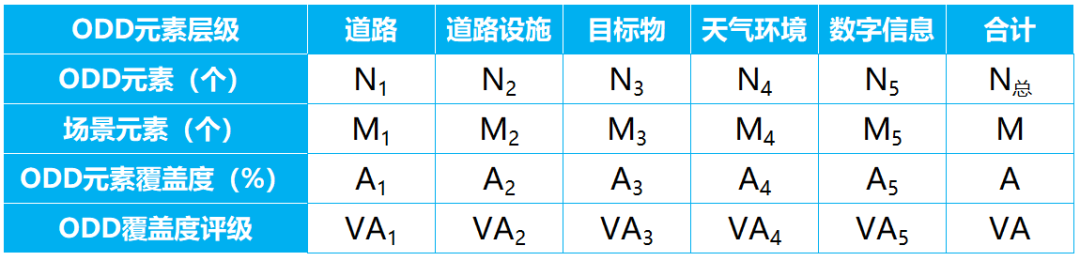
表6 ODD元素覆蓋度評價
4.3.2 功能測試用例覆蓋度評級
首先,面向系統功能和安全要求,篩選與待測功能強相關的ODD元素作為關鍵場景要素,通過測試矩陣的形式,得到功能測試場景(參考集合),對測試用例(輸入集合)的匹配度開展定性分析,本階段可定義為“功能關鍵場景覆蓋度”。
功能關鍵場景覆蓋度評價矩陣如表7所示。
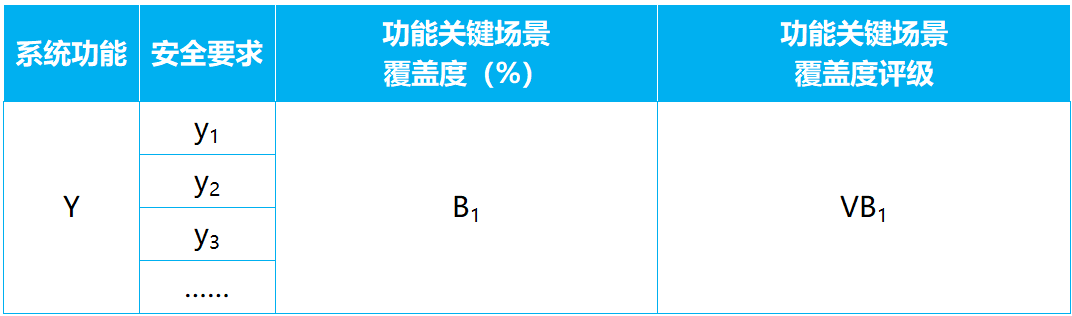
表7 功能關鍵場景覆蓋度評價
其次,基于上一步篩選的關鍵場景要素及其屬性,定義場景要素關鍵參數(關鍵因子),即對安全要求影響較大的參數,結合系統設計運行范圍對功能關鍵測試場景中關鍵參數覆蓋程度開展定量分析,本階段可定義為“關鍵因子覆蓋度”。
關鍵因子覆蓋度評價矩陣如表8所示。
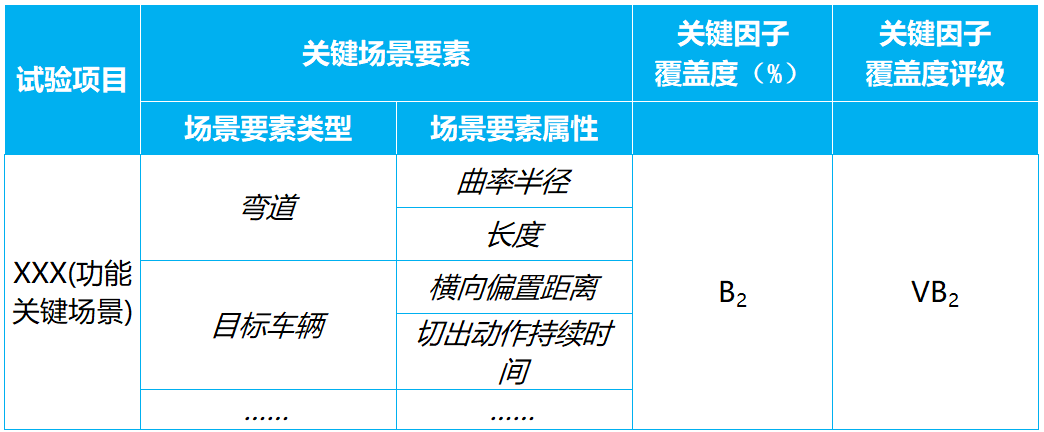
表8 關鍵因子覆蓋度評價
4.3.3 綜合覆蓋度評級
為量化不同指標對整體場景覆蓋的貢獻度,需采用加權求和模型進行綜合評估。該方法的核心思想是:通過單一指標評分結果,再結合指標權重進行加權求和,得到綜合評分,從而實現對多路徑協同覆蓋效果的客觀量化。測試場景綜合覆蓋度計算方法如公式(8)所示。
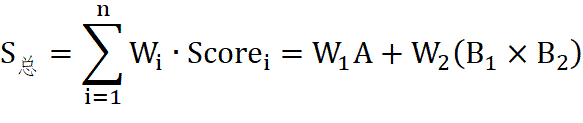
公式(8)
式中:
S總——測試場景綜合覆蓋度;
W? ——因素 i 的權重,且∑W?=1;
A ——ODD元素覆蓋度;
B? ——功能關鍵場景覆蓋度;
B? ——關鍵因子覆蓋度。
05結語
本篇文章系統性構建了智能網聯汽車測試場景覆蓋度解析框架,通過“動態駕駛任務執行”“動態駕駛任務后援與人機交互”雙層分析架構,明確了覆蓋度評估的核心路徑。針對功能驗證環節,提出基于功能邏輯樹的三級映射模型——分解系統功能需求、提取關鍵場景要素、構建參數組合矩陣,并以車道保持功能為實證對象完成場景參數空間建模。此外,針對覆蓋度分析框架進一步采用線性加權合成模型將多維覆蓋度指標整合為統一的綜合覆蓋度指數,實現了對測試場景集的量化評價。該體系還支持權重動態調整機制及評估路徑擴展,能夠靈活適應測試策略迭代需求。
本文研究成果為智能網聯汽車測試場景庫建設與優化提供了理論支撐與方法論框架,對推動駕駛自動化系統安全驗證的規范化發展具有重要實踐意義。未來,賽目科技還將面向不同等級駕駛自動化系統功能的技術標準和規范,持續橫向擴展測試場景集范圍,形成支撐型式認證與技術準入的測試基準。
-
智能網聯汽車
+關注
關注
9文章
1304瀏覽量
31884 -
賽目科技
+關注
關注
0文章
64瀏覽量
1954
原文標題:關于智能網聯汽車測試場景覆蓋度分析和評價方法的研究
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
PCIe協議分析儀能測試哪些設備?
順義1200畝自動駕駛封閉測試場首期道路設施和場景建設完成

智能網聯技術線路及測試方法詳細概述
自動緊急制動系統行人測試場景的研究
基于場景的智能網聯汽車模擬仿真測試評估方法與實踐



自動駕駛測試場景庫的構建及評價方法之場景生成方法研究




 工商網監
工商網監
評論