 關于歐盟法規中測試場景的研究
關于歐盟法規中測試場景的研究

關于歐盟法規中測試場景的研究
1.引言
場景是智能網聯汽車測試技術的基礎,基于場景的功能測試方法對于彌補基于里程的測試方法的局限性,提高系統開發效率、產品落地效率等方面都有重要作用。在眾多的場景來源中,標準法規場景是系統功能在研發和認證階段需要滿足的基本場景,能夠對智能網聯汽車應有的基本能力進行測試。法規類場景可確保智能網聯汽車在不同地區均能符合法規要求,從而確保車輛在道路上的安全性、合規性和可靠性。
在智能網聯汽車的立法層面,歐盟等國際組織持續開展法規制定工作,并且已經形成了多個成果,包括EU 2019/2144《新的車輛通用安全法規》、UN R171《駕駛員控制輔助系統(DCAS)型式批準的統一規定》、UN R157《自動車輛保持系統(ALKS)型式批準的統一規定》、EU 2022/1426《全自動駕駛車輛自動駕駛系統(ADS)型式批準的統一程序和技術規范》等,其中均針對測試場景進行了相關描述與規定。
同時,對于海外目標市場的車企來說,遵守目標國家或地區的法規標準,滿足當地的產品準入要求是進入該市場的必要條件。因此,企業無論是面向“出海”需求還是單純面向算法驗證的需求,法規類測試場景應被考慮為必須項。由于政策、市場等原因,歐洲成為國內車企出海的主要目標地區。但目前歐盟智能駕駛標準法規中并未給出具體場景參數,賽目科技對此開展相關研究,基于“功能場景→邏輯場景→具體場景”的邏輯思路,并結合“合理可預見”和專家經驗的仿真參數設置方法,構建具體測試場景集,為企業開展基于場景的模擬仿真測試提供參考。
2.測試場景要求及泛化方法
2.1標準法規測試場景
在歐盟汽車標準法規體系中,以汽車安全框架性技術法規EU2019/2144為代表,旨在加強對車內乘員、弱勢道路使用者的保護,減少交通事故率和人員傷亡。EU 2019/2144規定了在汽車安全領域應滿足各項技術法規,大部分直接采用了聯合國制修訂的UN R汽車技術法規,逐步建立起從組合駕駛輔助到自動駕駛的全方位監管體系。其中,UN R171針對駕駛員控制輔助系統(DCAS),規定了持續橫向和縱向運動控制輔助系統的性能要求[1];UN R157針對自動車道保持系統(ALKS),將特定交通環境中的自動駕駛系統車速上限由最開始的60 km/h限制擴展到130 km/h,并允許自動變道[2];針對更高級別的自動駕駛型式批準,歐盟率先獨立制定自己的規則EU 2022/1426,規定了適用于全自動車輛自動駕駛系統(ADS)型式批準的統一程序和技術規范[3]。以上法規均描述了各種測試場景要求,為智能網聯汽車提供了統一的測試基準。
2.1.1 R171測試場景
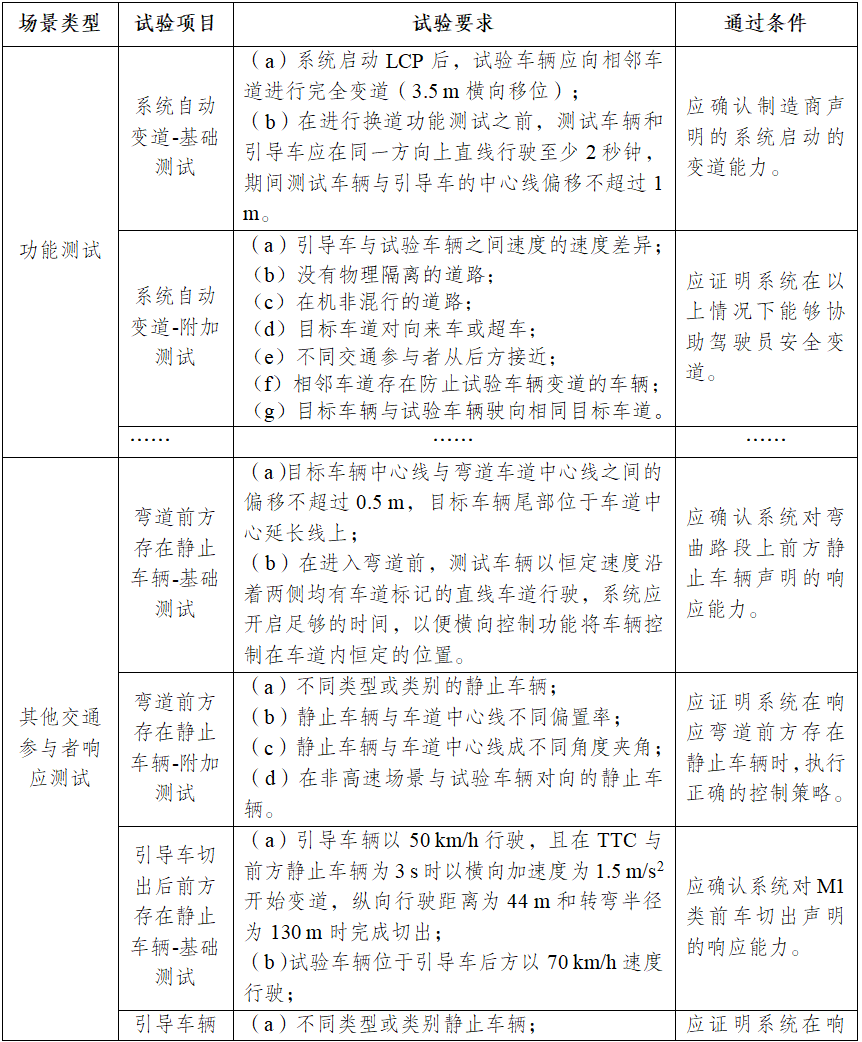
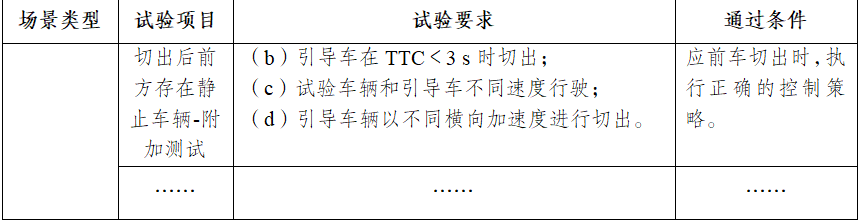
UN R171制定了關于駕駛員控制輔助系統(DCAS)型式認證的統一規定,可通過持續的橫向和縱向運動控制,協助人類駕駛員執行車輛駕駛任務(不完全接管駕駛),是ADAS的一個子集。在進行提交型式認證文件的測試場景部分,應至少包含附錄4中4.2.5部分提出的功能測試和其他交通參與者響應測試兩部分內容,目的是驗證OEM提交的系統設計文件中描述系統所具備的能力及行為表現與在實際測試中是否一致。其中,DCAS功能測試場景包括車道居中控制、駕駛員主動變道以及系統發起的車道變更測試。在滿足DCAS功能測試場景同時還需滿足其他交通參與者識別及響應測試場景,如直道或彎道前方靜止車輛、直道前方慢行車輛、目標車輛切出后存在靜止車輛、相鄰車道車輛切入、前方存在靜止行人或自行車、行人或自行車橫穿道路、車輛右轉與橫穿行人或自行車沖突、直行車輛與對向左轉車輛或右側直行車輛沖突等測試,試驗項目如表1所示。
表1R171測試場景清單
2.1.2 R157測試場景
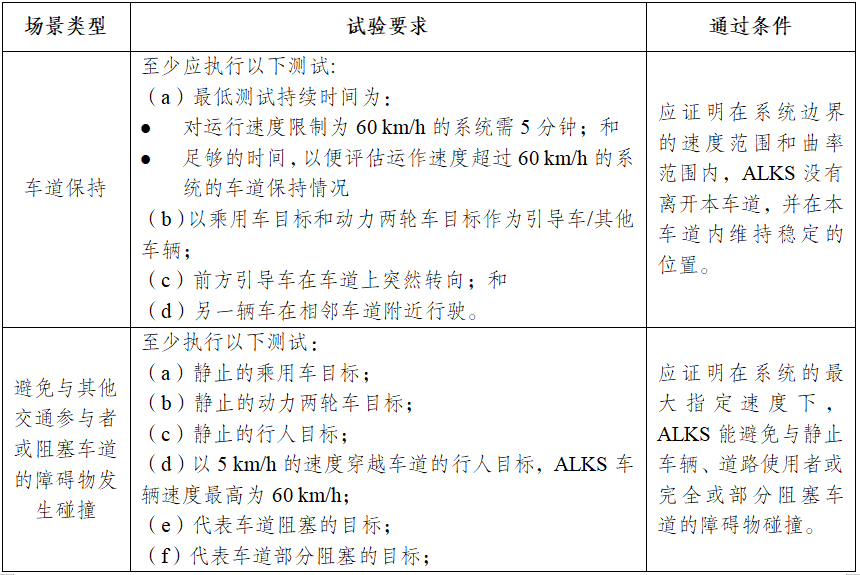
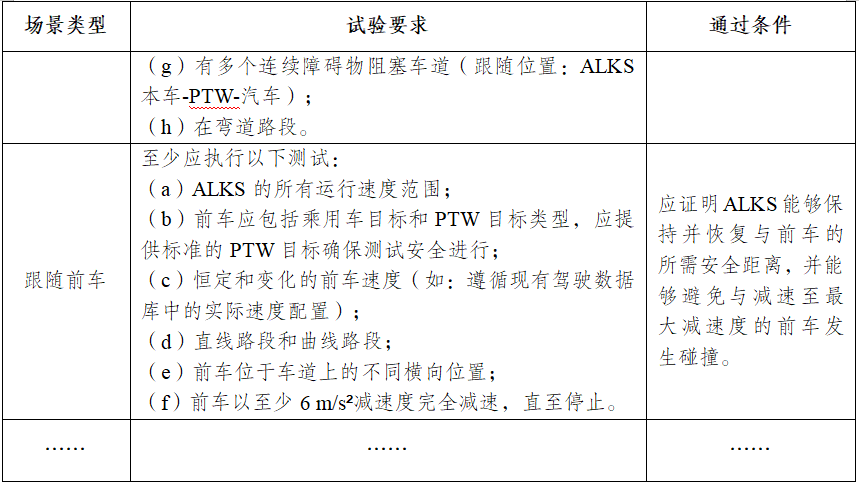
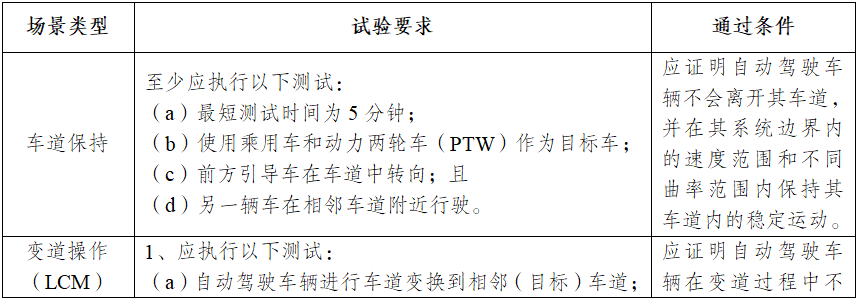
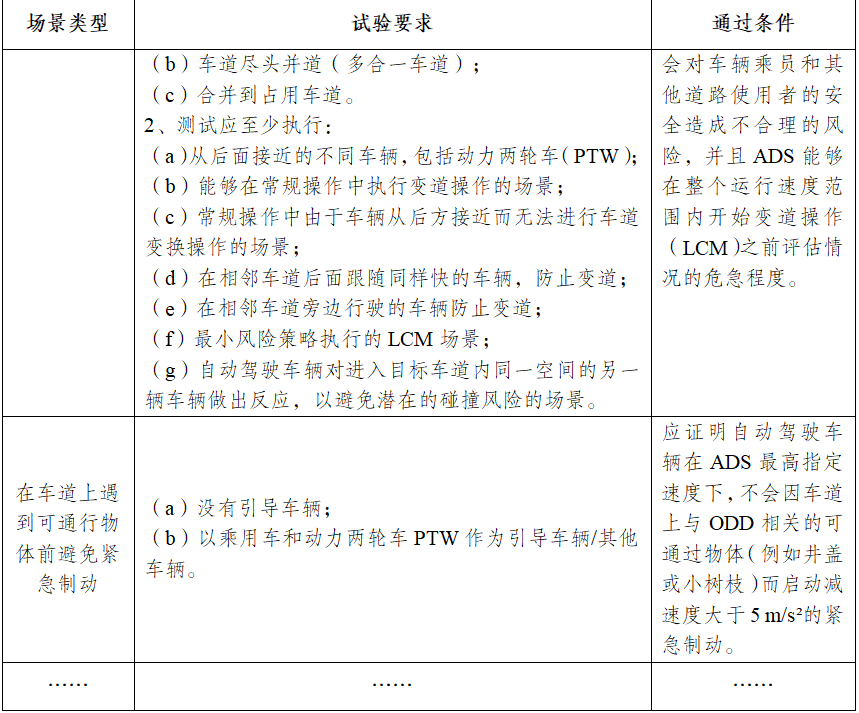
UN R157制定了關于自動車道保持系統(ALKS)車輛認證的統一規定,ALKS控制車輛橫向和縱向運動使其保持在車道內行駛,激活后無需駕駛員進一步的命令。該法規修訂后基本覆蓋了高速公路自動駕駛全場景,不再僅適用于高速公路低速或堵車場景。法規中附件5規定了場地測試的最小場景集合,目的是驗證本法規第5~7段中對ALKS的技術要求,以評估系統關于動態駕駛任務的性能。測試場景包括車道保持、避免與其他交通參與者或阻塞車道的障礙物相撞、跟隨前車、前車切入、前車變道后出現靜態障礙物、變道等,試驗項目如表2所示。
表2R157測試場景清單
2.1.3 EU 2022/1426測試場景
EU 2022/1426制定了關于全自動駕駛車輛(fully automated vehicles)型式認證的統一流程和技術標準,是世界上首個允許成員國批準注冊和銷售高級別自動駕駛技術汽車的技術法規。法規中附件3第三部分PART 3規定了實車測試的最小測試集合,其中8.1、8.2、8.5、8.6、8.7、8.8、8.9在封閉場地內進行測試,8.3、8.4、8.10在實際道路上進行測試。目的是驗證附件2中所述的最低性能要求、ADS的功能和附件3第二部分中所述的制造商的安全概念,以評估ADS的性能。測試場景包括車道保持、變道操作、避撞測試、跟隨前車、高速公路以及不同駕駛模式切換測試場景等,試驗項目如表3所示。
表3EU2022/1426測試場景清單
2.2基于法規的場景構建方法
基于“功能場景→邏輯場景→具體場景”的分析方法,結合賽目針對場景參數泛化原則的研究經驗,構建具體測試場景集,從而實現各法規中針對不同等級駕駛自動化系統的功能驗證。首先,基于試驗要求進行功能場景轉化,為保證場景的完整性,在試驗要求映射場景元素基礎上,還需增加一些其他必要元素進行組合,形成一個功能場景,至少包括道路、道路設施、運動對象(自車和其他交通參與者)、天氣環境的描述;其次,基于功能場景中確定的元素類別,映射場景參數并設定邏輯場景參數空間;最后,對場景參數分析并選取關鍵參數進行充分泛化,形成對應的仿真參數組合用于仿真試驗。具體測試場景集分析流程如圖1所示。
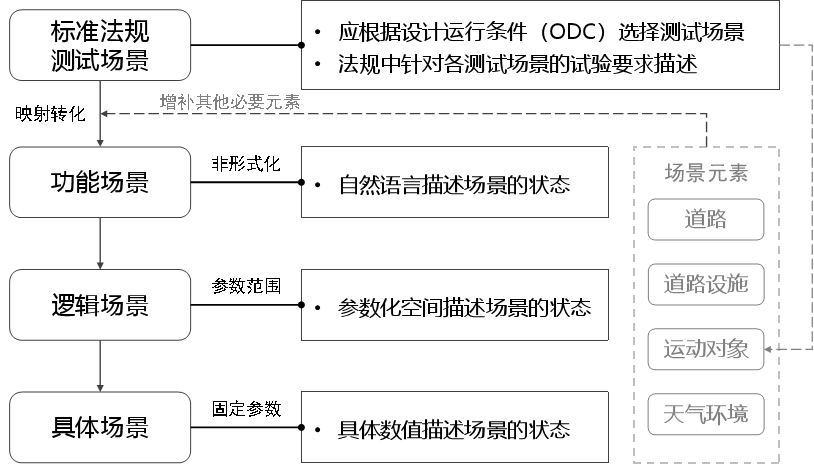
圖1 具體測試場景集分析流程
以R157中“車道保持試驗”為例,基于上述分析流程構建具體試驗場景,車道保持類具體場景生成框架如圖2所示。
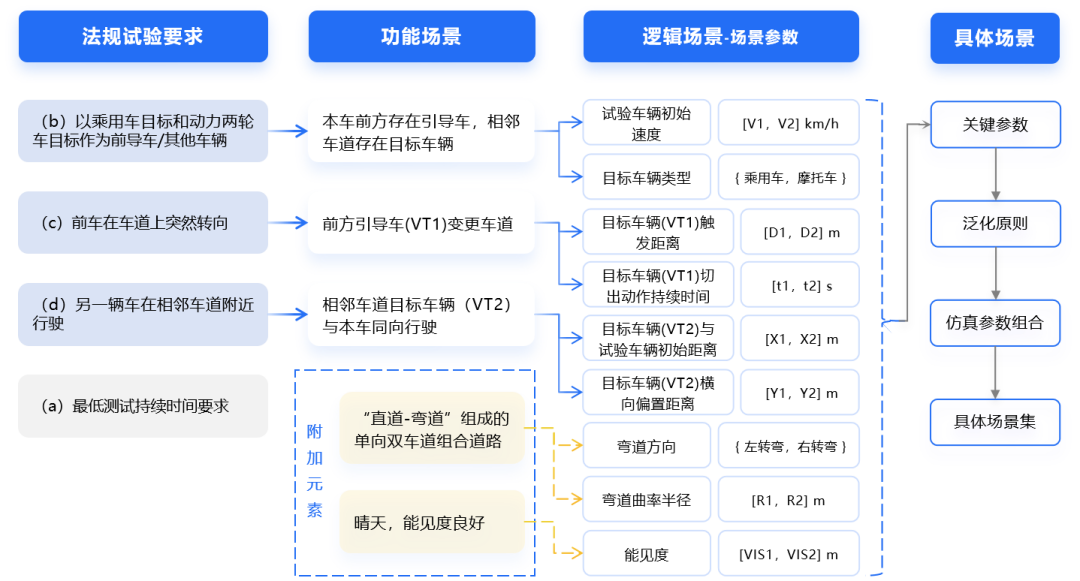
圖2 車道保持試驗具體場景生成框架
通過試驗要求分析,生成相應的符合測試需求的功能場景。除法規中針對自車和其他交通參與者的位置與動作信息外,補充設定直道-彎道的雙車道組合道路作為道路拓撲類型,同時明確能見度良好的天氣條件,構建功能場景。基于上述功能場景和系統的設計運行條件邊界,映射場景參數并得到相應參數空間,場景參數類型包括:試驗車輛初始速度、目標車輛(VT1/VT2)類型、目標車輛(VT1)觸發距離、目標車輛(VT2)與試驗車輛初始距離、目標車輛(VT2)橫向偏置距離、彎道曲率半徑等。根據試驗項目篩選關鍵參數,確定泛化原則,通過定義測試參數的不同組合(如車輛速度、目標物類型和橫向偏置、彎道曲率半徑等),從而得到具體試驗場景集。
3.仿真測試案例
為驗證上述具體場景集分析方法,本文基于Sim Pro仿真測試工具,參考圖2的設計思路,選取“彎道車道保持試驗項目”開展具體場景搭建及測試,場景描述示例如下。
3.1彎道車道保持試驗
3.1.1 試驗場景
彎道車道保持試驗場景應符合如下要求,示意圖如圖3所示。
a)試驗道路:一條直道、彎道和直道組成的單向雙車道組合道路,彎道前直道長度至少150 m,彎道后直道長度至少200 m,車道寬度為3.75 m,道路表面附著系數30.8。道路最高限速(V0Lim)、彎道方向(Fc)、彎道長度(Lc)按表4取值,彎道曲率半徑(Rρ)按表5取值。
a)道路交通標線:同向車道間車道線類型為白色虛線,其余為白色實線。
b)試驗環境:試驗車輛(VUT)前方存在目標車輛(VT1),相鄰車道存在目標車輛(VT2)同向勻速行駛。試驗車輛初始位置(D0VUT)、目標車輛觸發距離(DX0trigger_VT1)、目標車輛切出動作持續時間(To-VT1)、能見度(VIS)按表4取值,目標車輛類型(Type_VTn)、目標車輛(VT1)初始速度(V0VT1)、目標車輛(VT2)初始速度(V0VT2)、目標車輛與試驗車輛初始距離(D0VUT_VT2)、目標車輛橫向偏置距離(DYVT2_LC)按表5取值。
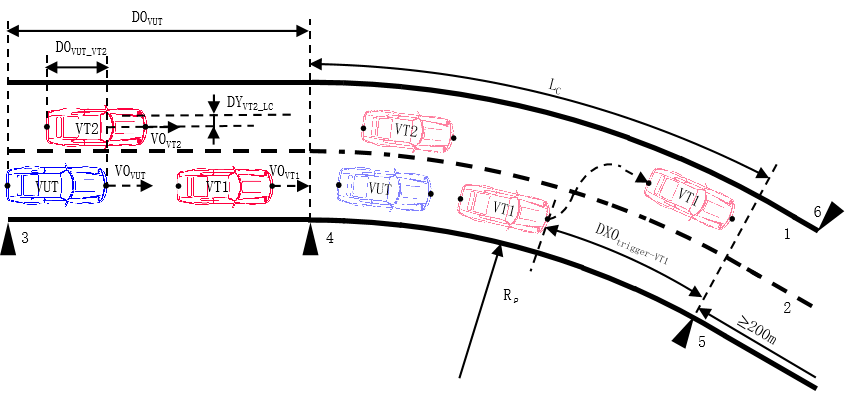
標引序號說明:
1——1號車道;
2——2號車道;
3——具體試驗場景起點;
4——彎道起點;
5——彎道終點;
6——具體試驗場景終點。
圖3 彎道車道保持試驗場景示意圖
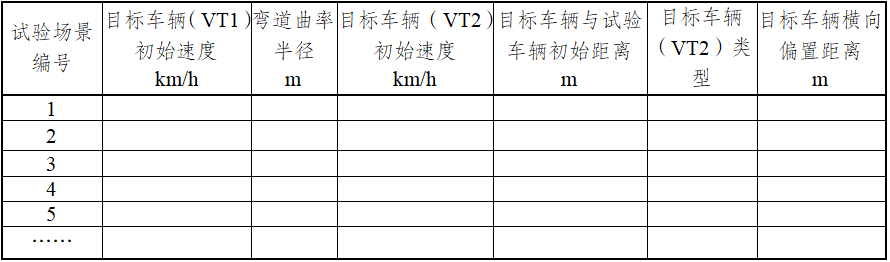
如表4和表5所示,表4是本場景中保持常量的參數,表5是本場景中進行泛化的參數,應將表4的所有參數與表5任意一行參數進行組合,構成具體試驗場景。
如表4和表5所示,表4是本場景中保持常量的參數,表5是本場景中進行泛化的參數,應將表4的所有參數與表5任意一行參數進行組合,構成具體試驗場景。
表4 彎道車道保持試驗場景一般參數列表
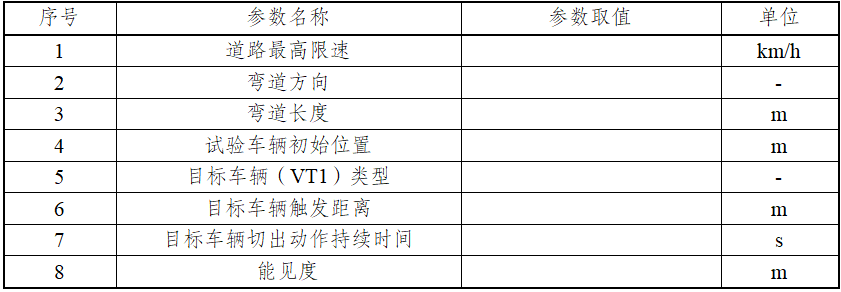
表5 彎道車道保持試驗場景列表
3.1.2 試驗步驟
應根據表4和表5組成的具體試驗場景進行仿真試驗,試驗步驟應符合以下要求:
a)試驗初始時,試驗車輛(VUT)穩定跟隨前方目標車輛(VT1),從初始位置(D0VUT)以初始速度(V0VT1)與目標車輛(VT1)在右側車道內沿車道中心線行駛。同時,目標車輛(VT2)以初始速度(V0VT2),與試驗車輛相對縱向距離(D0VUT_VT2)和橫向偏置距離(DYVT2_LC)在試驗車輛左側相鄰車道行駛。
b)當試驗車輛(VUT)跟隨目標車輛(VT1)進入彎道后,且目標車輛(VT1)與彎道終點相對縱向距離達到目標車輛觸發距離(DX0trigger_VT1)時,目標車輛(VT1)開始以某一合理軌跡,按照切出動作持續時間(To-VT1)和預設速度(V0VT1)勻速切出至左側相鄰車道沿車道中心線繼續行駛。
c)當達到以下任一結束條件時,仿真試驗結束:
1)目標車輛(VT1)完成切出動作后行駛100 m;
1)試驗車輛(VUT)與任一目標車輛(VT1/VT2)發生碰撞;
2)試驗車輛(VUT)停車1 s以上。
3.1.3 試驗記錄信息要求
應記錄以下信息:
a)試驗車輛(VUT)外輪廓與所有目標車輛(VT1/VT2)外輪廓的最小距離信息或判斷是否碰撞的其他信息;
a)試驗車輛(VUT)停車時長。
3.1.4 通過要求
試驗車輛應符合以下要求:
a)試驗車輛(VUT)不與任一目標車輛(VT1/VT2)發生碰撞;
b)試驗車輛(VUT)在本車道內保持穩定運動;
c)試驗車輛(VUT)不發出介入請求或執行最小風險策略;
d)試驗車輛(VUT)未發生1 s以上停車行為。
3.2試驗場景仿真示例
以3.1彎道車道保持試驗項目中泛化的某一具體試驗場景為例,其參數組合為:彎道方向為右轉彎,彎道曲率半徑500 m,目標車輛VT1和VT2均為乘用車,目標車輛(VT1)初始速度30 km/h,目標車輛(VT2)初始速度40 km/h,目標車輛(VT2)與試驗車輛初始距離 -80 m,目標車輛(VT2)橫向偏置距離 0.2 m,目標車輛(VT1)觸發距離100 m,目標車輛(VT1)切出動作持續時間3 s。仿真場景運行視頻如下:
6.結語
本篇文章基于歐盟法規中測試場景要求進行分析,對具體試驗場景的生成提出“試驗要求-場景元素-參數空間-參數組合”的逐級映射框架,分別論述標準法規測試場景清單、具體測試場景集分析流程以及車道保持試驗具體場景生成框架示例。最后,基于法規的具體試驗場景構建方法,以彎道車道保持試驗項目為例進行仿真驗證。未來,賽目科技還將從智能網聯汽車國際法規方面持續橫向擴展測試場景集范圍,為不同等級駕駛自動化系統功能提供統一的測試基準。
參考文獻
[1]Proposal for a new UN Regulation on uniform provisions concerning the approval of vehicle of vehicles with regard to Driver Control Assistance System (DCAS), 2024.
[2]01 series of amendments to UN Regulation No.157(Automated Lane Keeping Systems), 2023.
[3]COMMISSION IMPLEMENTING REUGLATION(EU) 2022/1426, 2022.
-
測試
+關注
關注
9文章
6201瀏覽量
131343 -
智能網聯汽車
+關注
關注
9文章
1298瀏覽量
31846
原文標題:關于歐盟法規中測試場景的研究
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
Sim?Pro 實現仿真測試場景全量構成

自動駕駛仿真測試場景生成方法:從技術突破到工程落地的全維度解析
橫河DL950錄波儀于電力系統的測試場景
航裕電源HY-SCS-MP系列可編程交流恒流源在斷路器動態測試場景中的應用

功率放大器如何助力電磁測試領域研究
走進賽目科技智能網聯汽車封閉測試場
跌落試驗機與沖擊試驗機的測試場景有何區別?

PA300系列功率計 :三種數據記錄方法詳解,應對不同測試場景

普科科技BNC轉雙香蕉插測試線PK1008:高性價比測試場景的可靠之選

歐盟新電池法規(EU)2023/1542 解析

電子元器件進入歐盟市關鍵認證
智能網聯汽車測試場景覆蓋度分析
PCIe協議分析儀能測試哪些設備?
海辰儲能獲頒歐盟新電池法規TüV SüD Mark證書

最新!歐盟 RoHS 與 REACH 法規解讀



 工商網監
工商網監
評論