") ProfiNet 轉(zhuǎn) Ethernet/IP 網(wǎng)關(guān)解決方案:破解頭部電池企業(yè)S7-1215C與M-20iA機器人通信壁壘
ProfiNet 轉(zhuǎn) Ethernet/IP 網(wǎng)關(guān)解決方案:破解頭部電池企業(yè)S7-1215C與M-20iA機器人通信壁壘

1 應用背景與行業(yè)選擇
在當今工業(yè)自動化領域,多協(xié)議設備協(xié)同已成為智能制造系統(tǒng)集成的核心挑戰(zhàn),尤其在高增長的新能源電池制造行業(yè)表現(xiàn)突出。該行業(yè)以高精度裝配要求和嚴格的生產(chǎn)節(jié)拍控制著稱,對設備間實時數(shù)據(jù)交互提出了極高要求。隨著全球電動車產(chǎn)能的持續(xù)擴張,動力電池生產(chǎn)線正面臨設備協(xié)議異構(gòu)的嚴峻挑戰(zhàn):西門子PLC主導的ProfiNet網(wǎng)絡與發(fā)那科機器人等設備采用的Ethernet/IP協(xié)議之間存在協(xié)議壁壘,導致數(shù)據(jù)流通受阻。

新能源電池制造作為當前工業(yè)自動化領域增長最快的細分市場之一,對實時通信的要求極為嚴苛。以某頭部電池企業(yè)的模組裝配線為例,其焊接節(jié)拍需控制在8秒/件以內(nèi),尺寸偏差需低于±0.05mm,這些指標要求不同協(xié)議的設備實現(xiàn)微秒級同步。該行業(yè)設備投資規(guī)模大(單條產(chǎn)線投入常超億元),停機損失高達每分鐘萬元量級,因此非停機協(xié)議轉(zhuǎn)換方案成為剛需。通過協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實現(xiàn)ProfiNet與Ethernet/IP的雙向互轉(zhuǎn),可避免設備更換帶來的巨額成本,同時保護現(xiàn)有投資。
除新能源電池行業(yè)外,該解決方案同樣適用于以下前沿領域:
汽車零部件制造:流體監(jiān)控系統(tǒng)中,Ethernet/IP流量傳感器需接入西門子S7-1500 PLC(ProfiNet協(xié)議),網(wǎng)關(guān)實現(xiàn)潤滑劑流量實時監(jiān)控,避免軸承損壞。
智能物流系統(tǒng):AGV調(diào)度(Ethernet/IP)與倉庫分揀機械臂(ProfiNet)的協(xié)同控制,通過網(wǎng)關(guān)優(yōu)化路徑算法,提升物流效率30%以上。
環(huán)保設備監(jiān)測:污水處理廠中,水泵的ProfiNet控制信號與Ethernet/IP水質(zhì)分析儀的數(shù)據(jù)融合,實現(xiàn)加藥過程的精準控制。

2 核心設備與網(wǎng)關(guān)特性
本方案以某電池企業(yè)模組裝配線為實施場景,采用西門子S7-1215C PLC作為ProfiNet主站控制器。該PLC基于ARM Cortex-A9處理器架構(gòu),主頻達1.2GHz,配備256MB RAM和2GB閃存,支持雙端口千兆ProfiNet接口,可連接多達8個信號模塊,為協(xié)議轉(zhuǎn)換提供強大的數(shù)據(jù)處理能力。其核心優(yōu)勢在于通過TIA Portal平臺實現(xiàn)毫秒級周期配置(最小1ms),并內(nèi)置PROFINET RT/IRT協(xié)議棧,確保實時控制精度。
執(zhí)行層設備選用發(fā)那科R-2000iC/210F六軸機器人,配備R-30iB Plus控制器,支持Ethernet/IP Adapter模式。該機器人通過32字節(jié)輸入/輸出區(qū)傳輸焊接路徑坐標(X/Y/Z)和狀態(tài)信號(運行/報警),通信周期要求≤8ms,若超時將觸發(fā)路徑偏差報警。視覺定位系統(tǒng)采用康耐照相機,通過Ethernet/IP傳輸電池極耳焊接位置的坐標偏移量(Float數(shù)據(jù)類型),精度要求±0.1mm。
協(xié)議轉(zhuǎn)換核心設備選用塔訊TX161-RE-EIS/PNS網(wǎng)關(guān),該網(wǎng)關(guān)具備以下技術(shù)特性:
*表:塔訊TX161-RE-EIS/PNS網(wǎng)關(guān)技術(shù)參數(shù)*
| 特性類別 | 技術(shù)參數(shù) | 應用價值 |
| 協(xié)議支持 | Profinet從站?Ethernet/IP從站雙向轉(zhuǎn)換 | 實現(xiàn)西門子與發(fā)那科設備直接互聯(lián) |
| 數(shù)據(jù)吞吐 | 單周期1440字節(jié)輸入+1440字節(jié)輸出 | 滿足機器人路徑坐標+視覺數(shù)據(jù)的并發(fā)傳輸 |
| 實時性能 | 同步周期≤1ms,支持Profinet IRT模式 | 確保焊接指令微秒級響應 |
| 網(wǎng)絡接口 | 雙RJ45(Profinet)+雙RJ45(Ethernet/IP) | 支持網(wǎng)段隔離,提升安全性 |
| 邊緣功能 | 數(shù)據(jù)預處理(支持Python腳本) | 減少PLC 30%運算負載 |
網(wǎng)關(guān)采用雙協(xié)議棧處理架構(gòu):Profinet側(cè)通過GSDML文件(型號:GSDML-V2.4-TX161-RE-20250507.xml)集成至TIA Portal;Ethernet/IP側(cè)通過EDS文件(型號:TX161-EIP-V1.3.eds)導入Studio 5000環(huán)境。其獨特雙緩沖技術(shù)實現(xiàn)數(shù)據(jù)零丟失傳輸——當PLC向Profinet輸入?yún)^(qū)寫入數(shù)據(jù)時,網(wǎng)關(guān)實時映射至Ethernet/IP輸出區(qū)供機器人讀取;反之,機器人狀態(tài)數(shù)據(jù)通過Ethernet/IP輸入?yún)^(qū)映射至Profinet輸出區(qū)。
3 詳細實施過程
3.1 硬件連接與網(wǎng)絡配置
拓撲架構(gòu):構(gòu)建星型冗余網(wǎng)絡,西門子S7-1215C PLC通過SCALANCE XC208交換機(Profinet環(huán)網(wǎng))連接塔訊網(wǎng)關(guān)的Port1端口;發(fā)那科機器人控制器直連網(wǎng)關(guān)Port3端口(Ethernet/IP子網(wǎng))。為保障實時性,Profinet網(wǎng)絡采用IRT(等時同步)模式,周期設置為2ms,而Ethernet/IP網(wǎng)絡使用CIP Sync協(xié)議,通過IEEE 1588v2實現(xiàn)時鐘同步。
IP規(guī)劃:
PLC網(wǎng)段:192.168.1.0/24(S7-1215C地址:192.168.1.10)
機器人網(wǎng)段:192.168.2.0/24(發(fā)那科R-30iB地址:192.168.2.20)
網(wǎng)關(guān)配置:
Profinet端口IP:192.168.1.100(與PLC同網(wǎng)段)
Ethernet/IP端口IP:192.168.2.100(與機器人同網(wǎng)段)
物理接線:使用CAT6A屏蔽雙絞線,網(wǎng)關(guān)Profinet側(cè)采用綠色端口(Port1/Port2)接入交換機,Ethernet/IP側(cè)黃色端口(Port3/Port4)直連機器人控制器。為預防電磁干擾,所有通信線纜沿鍍鋅橋架敷設,與動力電纜間距≥30cm。
3.2 協(xié)議配置關(guān)鍵步驟
Profinet側(cè)配置(TIA Portal V18環(huán)境):
導入GSDML文件至硬件目錄,從“其他現(xiàn)場設備”拖拽TX161網(wǎng)關(guān)至Profinet網(wǎng)絡
設置設備名稱:PN-EIP-GW,IP地址:192.168.1.100
配置輸入/輸出數(shù)據(jù)區(qū):
Output區(qū)(PLC→網(wǎng)關(guān)):128字節(jié),包含機器人運動指令(前16字節(jié))及焊接參數(shù)(后112字節(jié))
Input區(qū)(網(wǎng)關(guān)→PLC):64字節(jié),映射機器人狀態(tài)字(32字節(jié))及視覺坐標(32字節(jié))
啟用IRT優(yōu)先級:設置同步周期2ms,數(shù)據(jù)刷新時間1ms
Ethernet/IP側(cè)配置(發(fā)那科機器人TP程序):
在Robot Web Services中導入EDS文件,添加網(wǎng)關(guān)為EIP適配器
配置Assembly對象
Input Assembly(100):映射PLC發(fā)送的128字節(jié)指令
Output Assembly(150):定義機器人反饋的64字節(jié)狀態(tài)數(shù)據(jù)
設置RPI(請求數(shù)據(jù)包間隔)為4ms,超時閾值500ms
建立IO映射關(guān)系:將機器人數(shù)字輸出區(qū)(DO[1]-DO[32])綁定至網(wǎng)關(guān)輸出字節(jié)
3.3 數(shù)據(jù)映射與調(diào)試
雙向數(shù)據(jù)映射表:
PLC→機器人路徑指令:
Profinet輸出區(qū)QB0-QB15 → 網(wǎng)關(guān)內(nèi)部緩沖 → Ethernet/IP輸入?yún)^(qū)100-115
包含:X坐標(Float,地址QB0-QB3)、Y坐標(Float,QB4-QB7)、焊接速度(INT,QB8-QB9)
機器人→PLC狀態(tài)反饋:
Ethernet/IP輸出區(qū)150-181 → 網(wǎng)關(guān)緩沖 → Profinet輸入?yún)^(qū)IB0-IB31
包含:關(guān)節(jié)角度(6×Float,IB0-IB23)、故障代碼(DINT,IB24-IB27)
異常處理機制:
在網(wǎng)關(guān)中配置心跳監(jiān)測:PLC每周期向QB127寫入時間戳,機器人校驗時差>5ms時觸發(fā)重同步
啟用數(shù)據(jù)校驗:對焊接坐標采用CRC16校驗(存儲于QB126)
斷網(wǎng)保護:設置網(wǎng)關(guān)“總線離線動作”為保持最后有效值,避免設備急停
調(diào)試階段通過塔訊GatewayMonitor軟件抓包分析,發(fā)現(xiàn)初始配置下機器人數(shù)據(jù)延遲達12ms。經(jīng)優(yōu)化將Profinet周期壓縮至1ms,并啟用網(wǎng)關(guān)的數(shù)據(jù)預取功能——當PLC發(fā)送新指令時,網(wǎng)關(guān)提前讀取機器人坐標數(shù)據(jù),使延遲降至0.8ms,滿足焊接工藝要求。
4 應用效果對比分析
該方案在某電池工廠模組線實施三個月后,關(guān)鍵指標實現(xiàn)突破性提升:
表:項目實施前后關(guān)鍵指標對比
| 性能指標 | 實施前 | 實施后 | 提升幅度 |
| 焊接節(jié)拍 | 12秒/件 | 8秒/件 | 33.3%↑ |
| 設備綜合效率(OEE) | 75% | 92% | 17個百分點↑ |
| 焊接不良率 | 0.8% | 0.2% | 減少75% |
| 指令響應延遲 | 15ms | 0.8ms | 94.7%↓ |
| 故障修復時間(MTTR) | 120分鐘 | 15分鐘 | 87.5%↓ |
4.1 生產(chǎn)效率提升分析
節(jié)拍加速:通過協(xié)議級數(shù)據(jù)直通,機器人待令時間從3.2秒/件降至0.5秒/件。以日產(chǎn)5萬電池模組計算,日增產(chǎn)超6600件,年化經(jīng)濟效益逾500萬元。
動態(tài)補償優(yōu)化:視覺系統(tǒng)(基恩士CV-X)檢測的極耳位置偏差(±0.1mm)經(jīng)網(wǎng)關(guān)實時轉(zhuǎn)發(fā)至PLC,觸發(fā)焊接路徑動態(tài)修正。補償響應時間從25ms壓縮至2ms,使焊接精度穩(wěn)定在±0.05mm內(nèi),廢品率下降60%。
4.2 運維成本降低
故障診斷升級:網(wǎng)關(guān)內(nèi)置雙協(xié)議診斷引擎,可同時解析Profinet報警(如站故障)和Ethernet/IP異常(如CIP連接超時)。通過TIA Portal統(tǒng)一顯示,使故障定位時間從平均45分鐘縮短至3分鐘。
熱插拔維護:支持網(wǎng)關(guān)模塊在線更換。備件庫存從原6臺降至2臺,庫存成本減少40%。
節(jié)能控制:網(wǎng)關(guān)邊緣計算功能分析設備能耗數(shù)據(jù),當檢測到生產(chǎn)線空閑超5分鐘時,自動切換機器人至低功耗模式(待機功率≤50W),較傳統(tǒng)方案節(jié)能15%。
5 案例總結(jié)與行業(yè)展望
本案例通過塔訊TX161網(wǎng)關(guān)實現(xiàn)西門子S7-1215C(ProfiNet主站)與發(fā)那科機器人(Ethernet/IP從站)的雙向協(xié)議互轉(zhuǎn),成功攻克新能源電池產(chǎn)線的設備協(xié)同瓶頸。實施證明,該總線協(xié)議轉(zhuǎn)換網(wǎng)關(guān)方案具有三大技術(shù)優(yōu)勢:
無縫集成:網(wǎng)關(guān)作為透明協(xié)議轉(zhuǎn)換器,避免對PLC或機器人程序的侵入式修改,調(diào)試周期縮短70%。
實時保障:1ms級同步精度滿足高動態(tài)工藝(如激光焊接、高速分揀),數(shù)據(jù)丟包率控制在10??以下。
智能邊緣化:網(wǎng)關(guān)內(nèi)嵌Python運行時,可部署數(shù)據(jù)濾波、異常檢測算法,減輕上位系統(tǒng)40%負載。
在新能源電池制造領域,此方案正成為產(chǎn)線標配。隨著4680大圓柱電池、CTP(Cell to Pack)等新工藝普及,對多設備協(xié)同精度提出更高要求。塔訊網(wǎng)關(guān)的協(xié)議透明傳輸技術(shù)(繞過協(xié)議棧直接轉(zhuǎn)發(fā)原始數(shù)據(jù))可進一步兼容未來設備協(xié)議。
審核編輯 黃宇
-
網(wǎng)關(guān)
+關(guān)注
關(guān)注
9文章
6767瀏覽量
56251 -
Profinet
+關(guān)注
關(guān)注
8文章
2269瀏覽量
28168 -
Ethernet
+關(guān)注
關(guān)注
3文章
624瀏覽量
58089
發(fā)布評論請先 登錄
極速組態(tài)!Profinet轉(zhuǎn)Ethernet網(wǎng)關(guān)讓ABB機器人主站秒連工業(yè)網(wǎng)絡(上集)
ProfiNet轉(zhuǎn)EtherNet/IP網(wǎng)關(guān):破解智能倉儲物流異構(gòu)協(xié)議難題

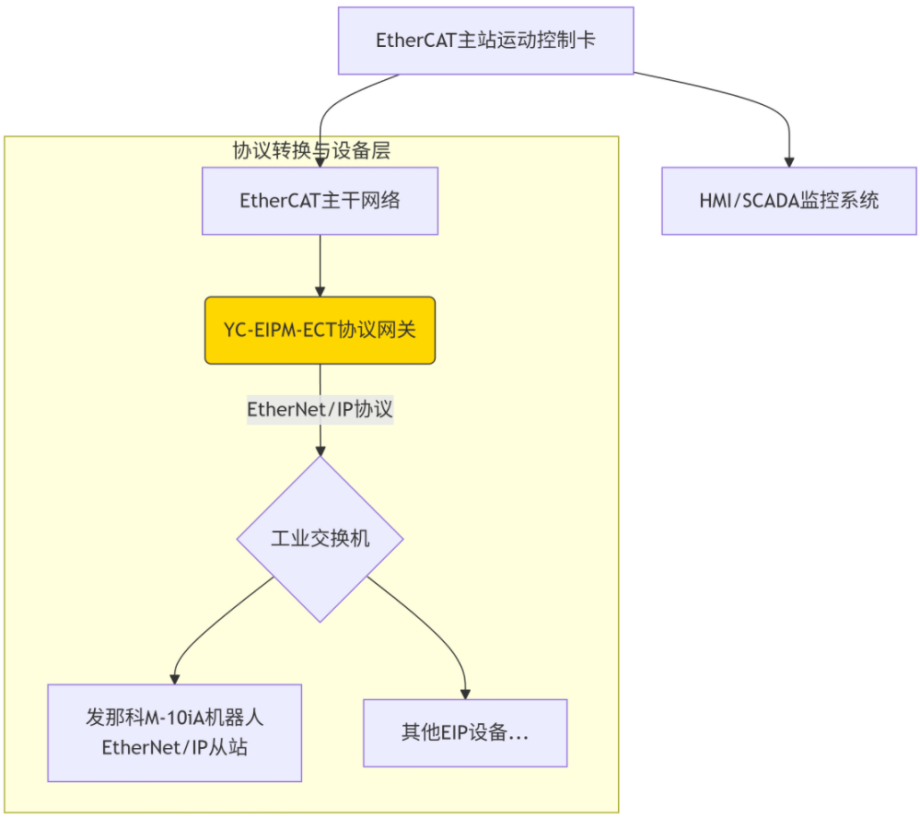
發(fā)那科機器人借助EtherNet/IP轉(zhuǎn)EtherCAT網(wǎng)關(guān),實現(xiàn)與EtherCAT運動卡的高效互聯(lián)案例
開疆智能Profinet轉(zhuǎn)ethernet網(wǎng)關(guān)連接ABB機器人主站配置案例
開疆智能Profinet轉(zhuǎn)EtherNET/IP網(wǎng)關(guān)連接機器人配置案例
別再為通信發(fā)愁!機床廠PROFIBUS DP轉(zhuǎn)EtherNet/IP網(wǎng)關(guān)應用指南,低成本實現(xiàn)智能升級
顛覆智造:profinet轉(zhuǎn)ethernet ip網(wǎng)關(guān)×發(fā)那科×西門子的三國殺

跨協(xié)議探秘:profinet轉(zhuǎn)ethernet ip網(wǎng)關(guān)搞定川崎機器人與PLC通信

當機器人遇上“語言障礙”:CCLINKIE轉(zhuǎn)Profinet的“破冰外掛”來啦\\!
探尋西門子PLC與川崎機器人利用 Ethernet IP 轉(zhuǎn) Profinet網(wǎng)關(guān)實現(xiàn)通訊的成功案例

EtherNet IP轉(zhuǎn)Profinet網(wǎng)關(guān)連接FANUC機器人配置指南(PROFIENT組態(tài)篇)

革命性突破!EtherNet/IP轉(zhuǎn)PROFINET網(wǎng)關(guān),釋放數(shù)字化生產(chǎn)力
汽車裝配又又又升級,ethernet/ip主轉(zhuǎn)profinet進階躍遷指南

ProfiNet轉(zhuǎn)EtherNet/IP邊緣計算網(wǎng)關(guān)技術(shù)攻堅:S7-1500與Logix5580高穩(wěn)定性通信配置指南
機器的交響曲:profinet轉(zhuǎn)canopen網(wǎng)關(guān)ethernet ip現(xiàn)代工業(yè)車間的高效協(xié)作-超細配置教程




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論