 EtherNetIP轉Profinet網關連接發那科機器人配置實例解析
EtherNetIP轉Profinet網關連接發那科機器人配置實例解析

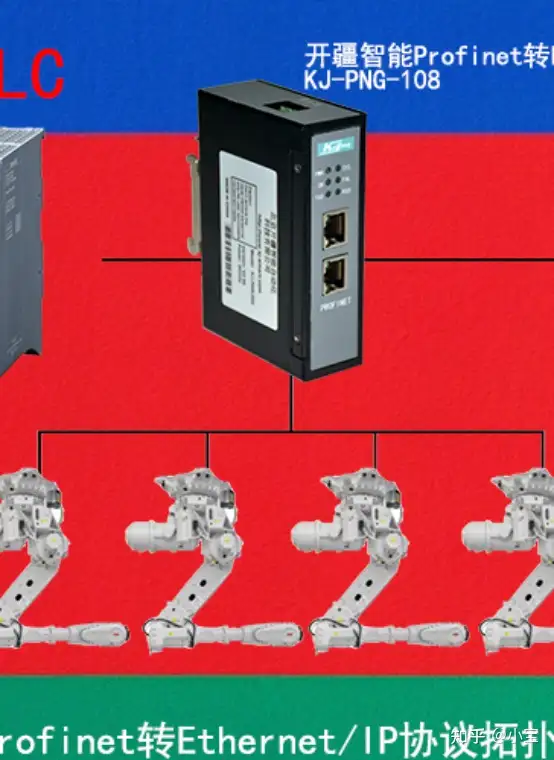
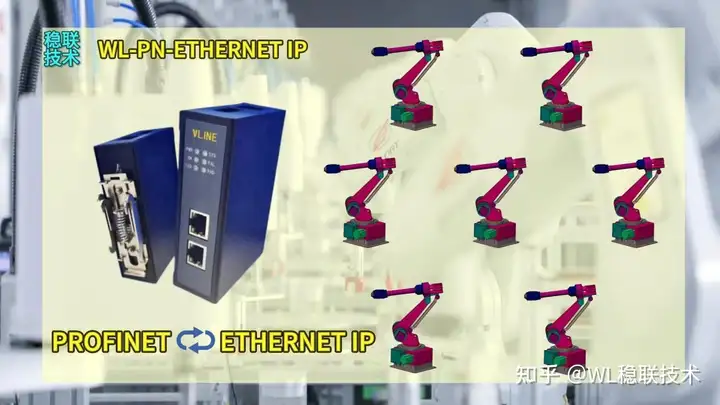
本案例主要展示了如何通過Ethernet/IP轉Profinet網關實現西門子1200PLC與發那科搬運機器人的連接。所需的設備有西門子1200PLC、開疆智能Ethernet/IP轉Profinet網關以及Fanuc機器人。

具體配置步驟:打開西門子博圖配置軟件,添加PLC。這是配置的第一步,為后續的操作奠定基礎。導入Ethernet/IP轉Profinet網關GSD文件。GSD文件包含了網關的設備描述信息,導入后才能在博圖軟件中識別和配置該網關。安裝Ethernet/IP轉Profinet網關GSD后選擇對應模塊。

確保選擇正確的模塊,以便與實際的硬件設備相對應。設置Ethernet/IP轉Profinet網關IP及設備名稱。本例中名稱為PN1,設備IP為192.168.20.10。合理設置IP和名稱有助于在網絡中準確識別和管理設備。設置發送接收數據長度。可根據實際需求添加更大長度,以滿足不同的數據傳輸要求。
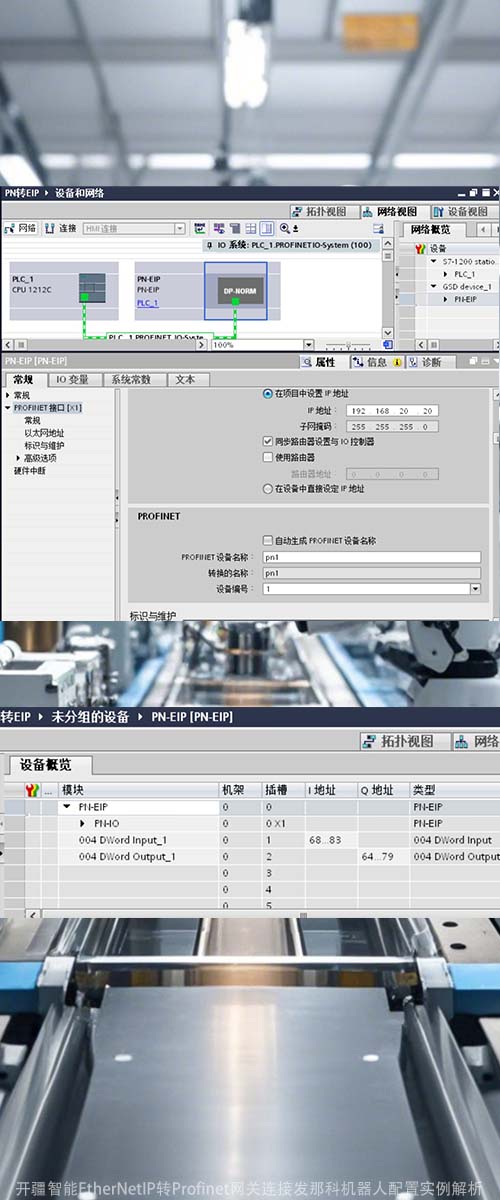
下載組態到PLC,設置好機器人的IP地址,打開機器人設置菜單找到主機通訊選項。下載組態使PLC按照設置的參數運行,同時設置機器人的IP地址是實現通信的關鍵步驟之一。找到搬運機器人控制端的TCP/IP選項。這是配置機器人網絡通信的重要環節。設置機器人的IP地址。
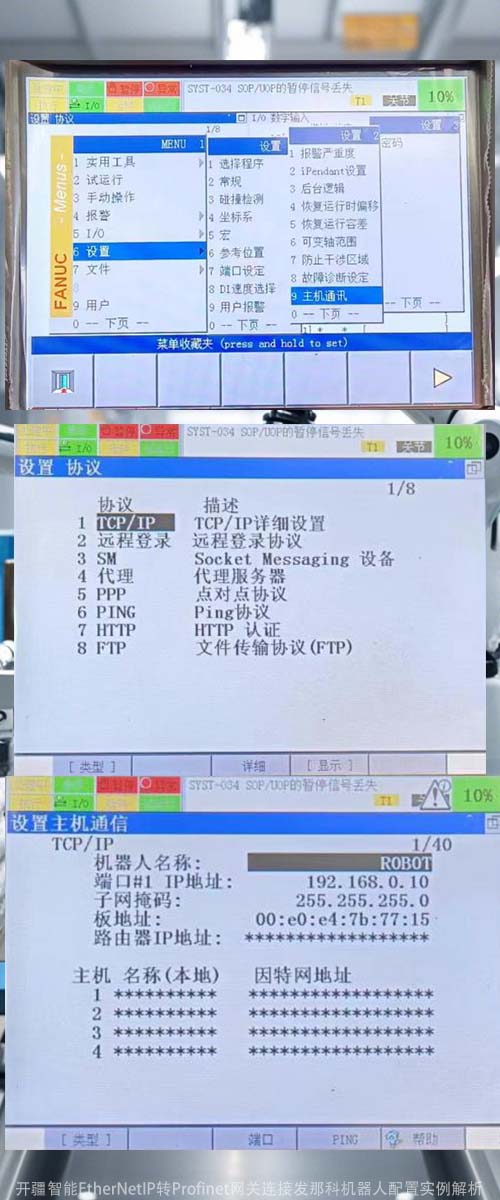
本例為192.168.0.10,確保與其他設備在同一網絡范圍內且不沖突。設置機器人連接的遠程I/O的IP地址即Ethernet/IP轉Profinet網關EtherNet/IP端的IP地址。建立機器人與網關之間的通信連接。添加一個鏈接,為數據傳輸創建通道。
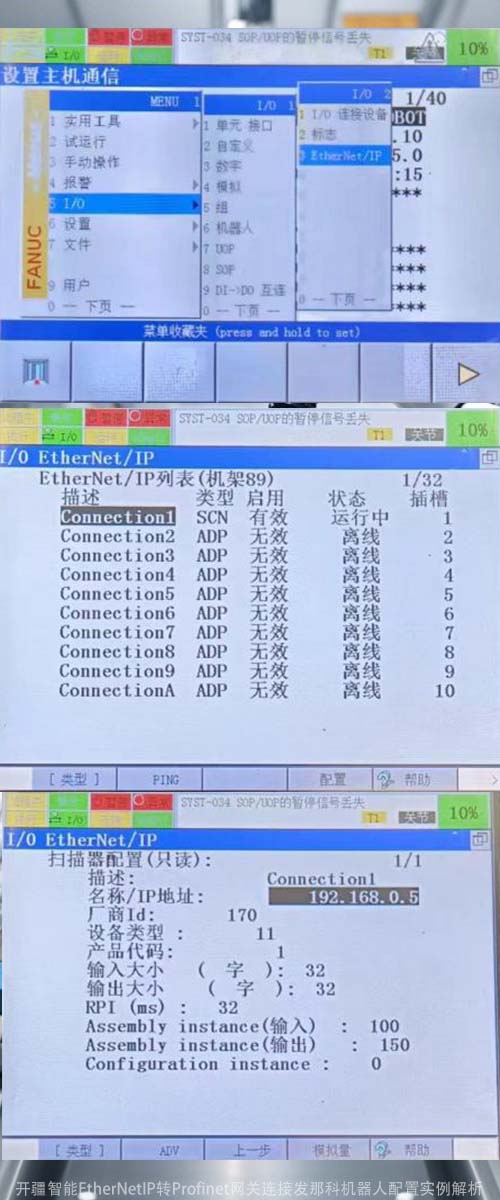
設置好從站IP、廠商ID、設備類型、產品代碼和輸入輸出大小等參數。本例中從站IP為192.168.0.5,廠商ID為170,設備類型11,產品代碼1,輸入輸出大小32個字(64字節),Assemblyinstance的輸入輸出為100/150。如果設備不能導入eds文件,參數可從網關的eds文件中查找。
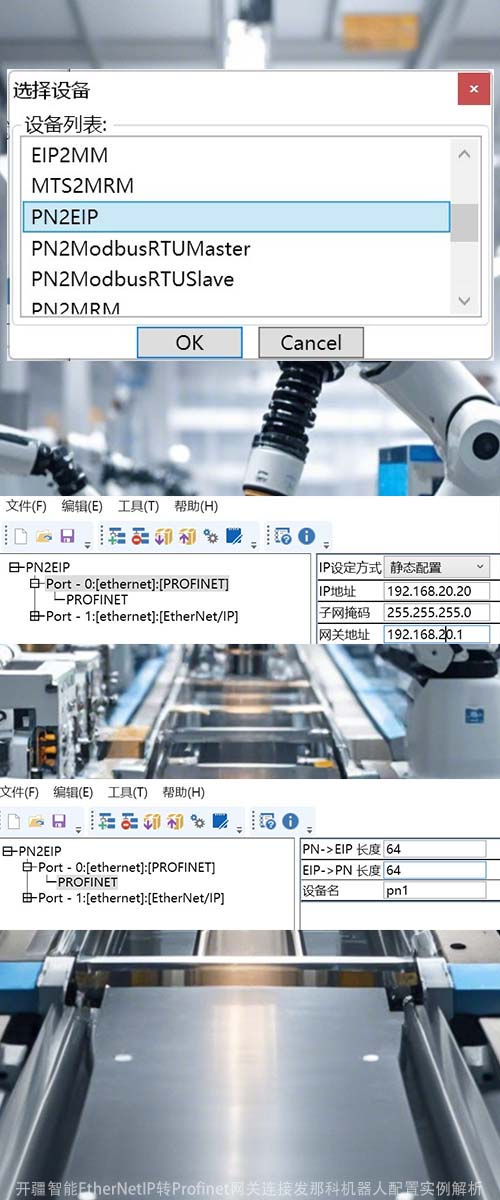
打開Ethernet/IP轉Profinet網關配置軟件,選擇PN2EIP。因為網關作為EtherNet/IP從站,所以選擇相應的配置選項。設置Ethernet/IP轉Profinet網關Profinet端的IP地址及設備名稱。和博圖組態保持一致,確保整個系統的參數統一。
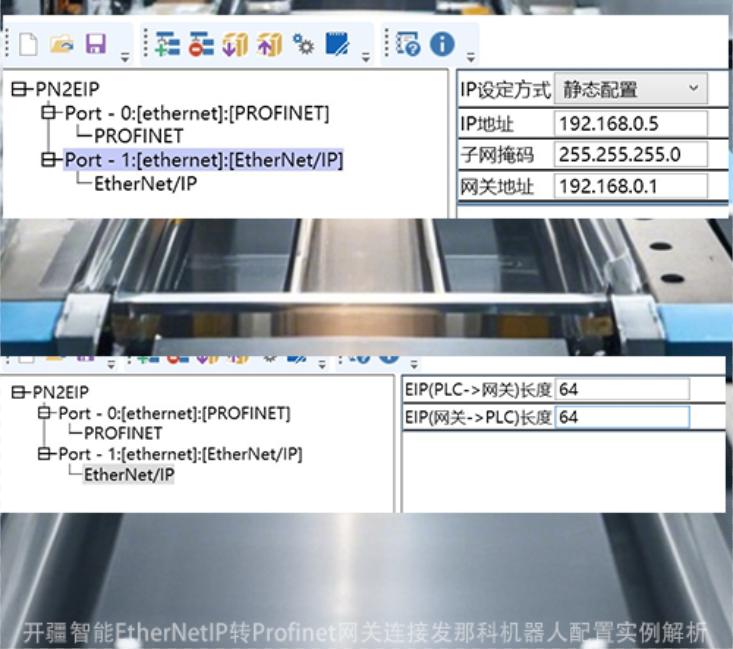
設置數據長度為64字節。由于機器人設置為32個字,換算后為64字節,保持一致以確保數據傳輸的準確性。設置EtherNet/IP端的IP地址以及數據長度。下載配置到Ethernet/IP轉Profinet網關后重新上電即可使用。完成所有配置后,重新上電使網關按照新的配置運行,實現西門子1200PLC與發那科搬運機器人的連接和通信。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
網關
+關注
關注
9文章
6767瀏覽量
56249 -
Profinet
+關注
關注
8文章
2269瀏覽量
28168 -
Ethernet
+關注
關注
3文章
624瀏覽量
58084
發布評論請先 登錄
profinet轉ethernet網關連接發那科機器人配置案例

Profinet轉EthernetIP網關連接HCS-6100系統配置

Modbus轉profient網關連接Smart PLC實現Profinet轉modbus協議轉換
Profinet轉Modbus TCP網關連接搬運機器人配置案例
EPR6-S工業機器人通過EtherCAT轉profinet網關接入西門子系統
Profinet轉Modbus TCP網關連接搬運機器人配置案例

開疆智能Profinet轉EthernetIP從網關連接ABB機器人做EtherNet主配置案例
開疆智能Profient轉DeviceNET主網關連接發那科機器人配置案例
從“零”到“聯”:Profinet轉Ethernet/IP網關搞定發那科機器手臂
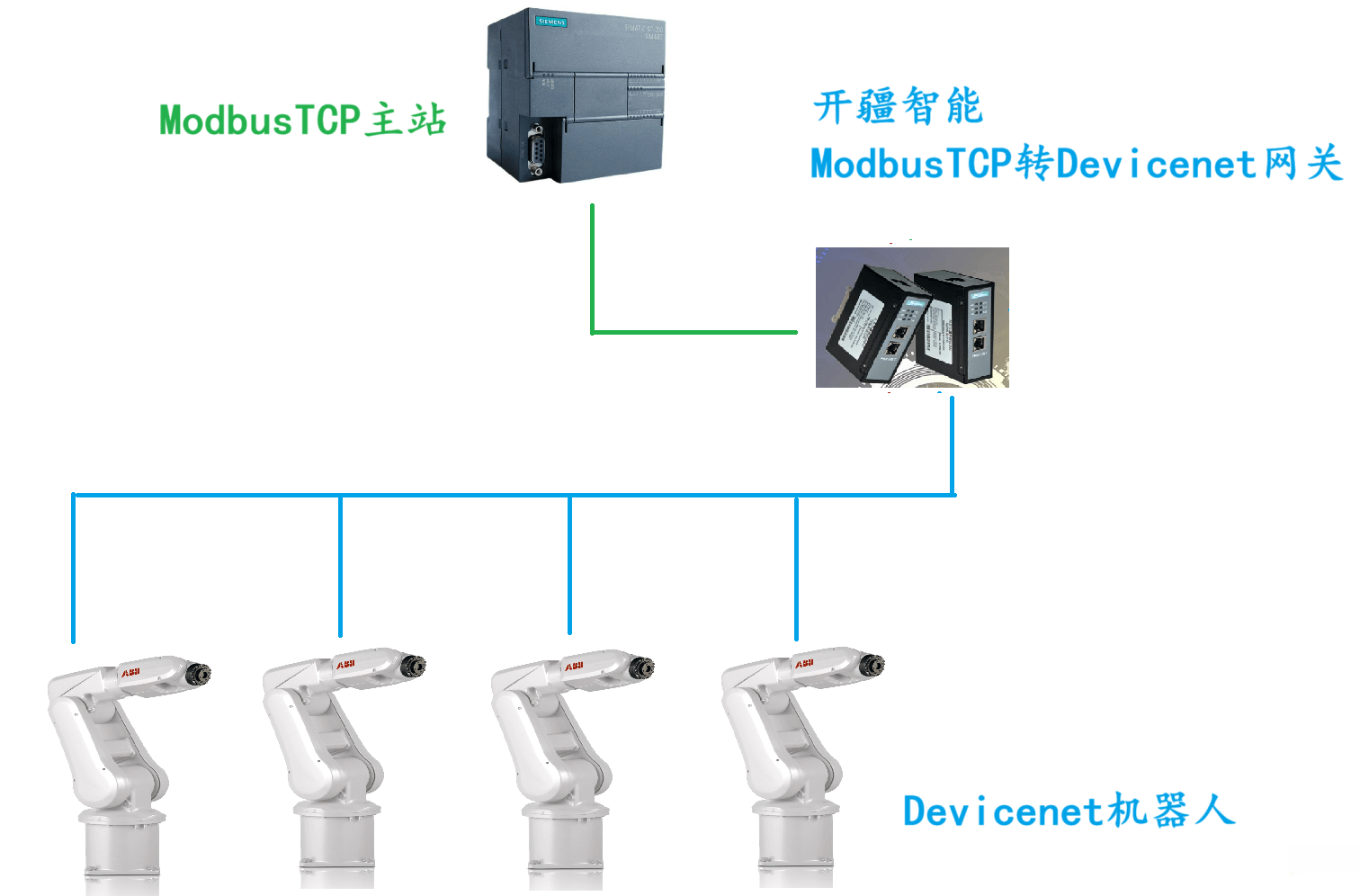
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例

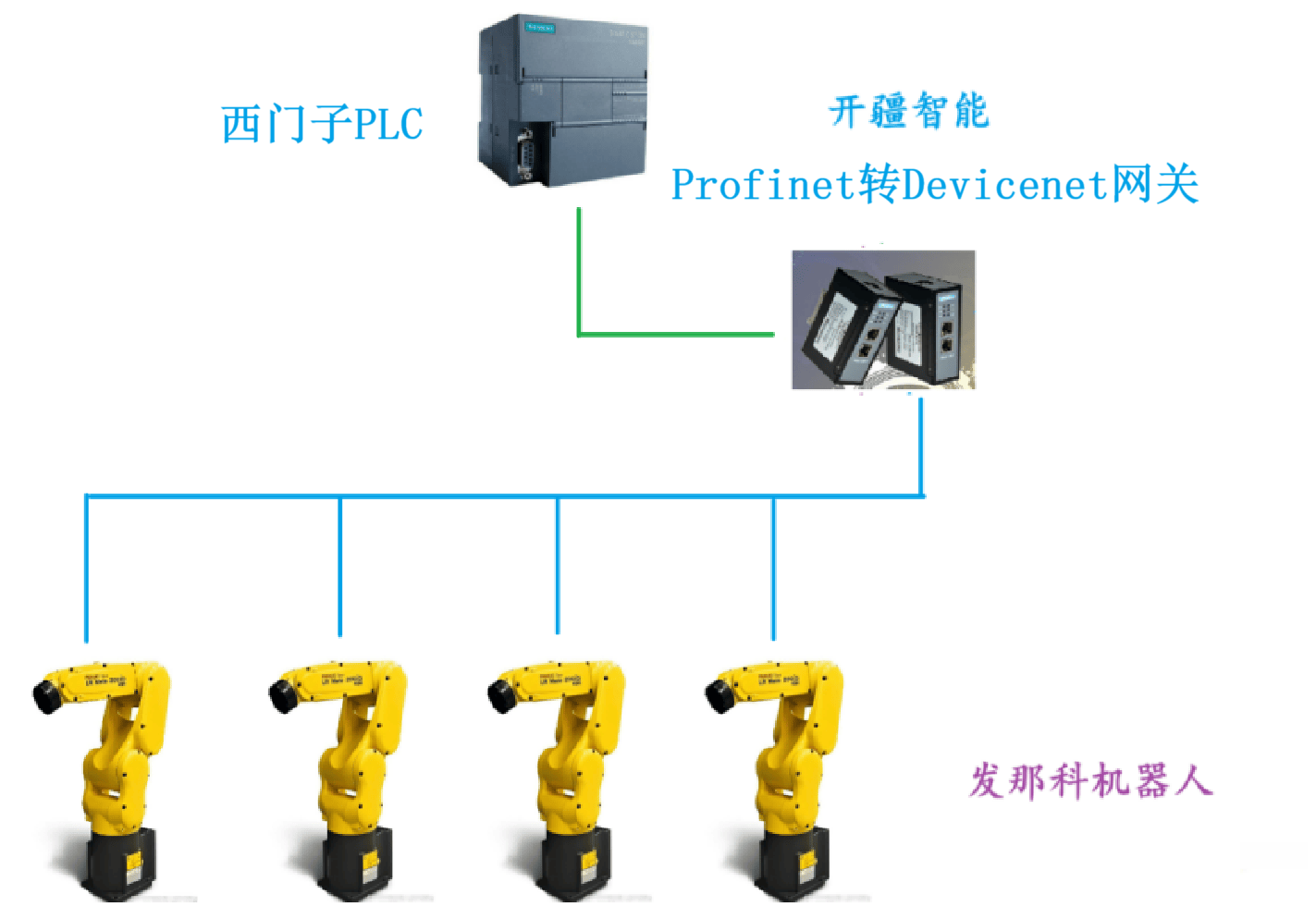
開疆智能Profinet轉Devicenet網關連接發那科機器人配置案例



 工商網監
工商網監
評論