") 小米汽車端到端智駕技術(shù)介紹
小米汽車端到端智駕技術(shù)介紹

隨著智能駕駛技術(shù)的發(fā)展,越來越多企業(yè)紛紛進(jìn)入汽車行業(yè),希望能分得獨(dú)屬于自己的一杯羹。但在市場的選擇下,已有一部分品牌走入了歷史的塵埃。但也有部分車企,卻穩(wěn)穩(wěn)地站穩(wěn)了腳跟,小米就是其中一個(gè),作為后起之秀,小米在宣布造車前被非常多的人質(zhì)疑,但在“真香”定律下,小米創(chuàng)下了很多友商所不能及的成就。作為科技企業(yè),小米也在智能駕駛領(lǐng)域也不斷研發(fā)及突破,并推送了端到端自動(dòng)駕駛系統(tǒng)。
小米端到端功能簡介
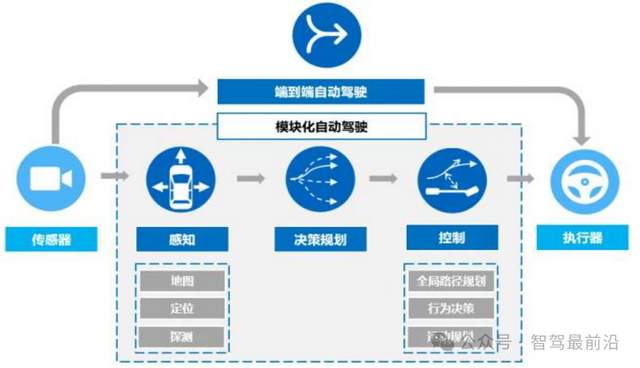
所謂“端到端”,即是指系統(tǒng)從最初的外部環(huán)境信息捕捉,到最終的車輛控制指令輸出,都由一個(gè)整體化的軟件和硬件平臺(tái)協(xié)同完成,無需中間繁瑣的模塊拆分,從而大幅降低了信息傳遞的延遲和誤差。這種架構(gòu)不僅在技術(shù)實(shí)現(xiàn)上更加高效,也使得系統(tǒng)能夠自適應(yīng)各類復(fù)雜場景,在多變的道路環(huán)境中依然保持高水平的魯棒性與安全性。
今年2月份,小米端到端全場景智能駕駛功能實(shí)現(xiàn)了全量推送,這一功能給車主提供了“上車即用,車位到車位”的智能駕駛體驗(yàn)。與傳統(tǒng)模塊化架構(gòu)相比,小米采用了端到端的深度神經(jīng)網(wǎng)絡(luò)建模方式,從傳感器信號(hào)輸入到?jīng)Q策規(guī)劃輸出均由一個(gè)統(tǒng)一的模型完成。這種數(shù)據(jù)驅(qū)動(dòng)和模型泛化能力極強(qiáng)的架構(gòu),使得系統(tǒng)能夠面對(duì)復(fù)雜多變的現(xiàn)實(shí)路況,呈現(xiàn)出前所未有的駕控體驗(yàn)。
只需上車、開啟導(dǎo)航、掛入D擋,再按下智駕鍵,車輛即可自動(dòng)完成路邊啟動(dòng)、ETC或閘機(jī)通行、環(huán)島駕駛等多種駕駛場景的無縫銜接。無論是在城市道路、快速路,還是高速公路、封閉園區(qū)和停車場,小米的端到端全場景智能駕駛都能夠提供穩(wěn)定、流暢的行駛體驗(yàn)。使用體驗(yàn)也力求充分體現(xiàn)出“駕駛更擬人”的理念,即可以提供老司機(jī)的駕駛經(jīng)驗(yàn),能夠提前預(yù)判路況并規(guī)劃出最優(yōu)行駛路徑,確保行車安全和舒適。

得益于系統(tǒng)對(duì)前方障礙物和復(fù)雜情況的快速反應(yīng)能力,在遇到緩行車輛、行人以及路邊障礙時(shí),小米的端到端智駕系統(tǒng)能夠迅速做出繞行決策,保持車輛在車道中央安全行駛,從而顯著提升通行效率。這種全新的端到端體驗(yàn)不僅大大降低了駕駛員的操作負(fù)擔(dān),更讓駕駛變得簡單、便捷,成為未來智能出行的重要趨勢(shì)。
硬件基礎(chǔ)決定智駕能力下限
硬件平臺(tái)作為智能駕駛系統(tǒng)的基石,對(duì)系統(tǒng)整體性能起到了至關(guān)重要的作用。智能駕駛系統(tǒng)的高效運(yùn)行離不開對(duì)物理世界的精確感知,而這一切的實(shí)現(xiàn)都建立在堅(jiān)實(shí)的硬件基礎(chǔ)之上。小米汽車在設(shè)計(jì)之初,就充分考慮到了對(duì)外部世界的探索需求。以小米SU7為例,其全系車型均標(biāo)配11顆高清攝像頭,實(shí)現(xiàn)了車輛周圍360度無死角的環(huán)境感知;而在小米SU7 Pro、Max及Ultra版本中,更是增加了前向激光雷達(dá),進(jìn)一步提升了前方感知能力,確保在各種復(fù)雜場景下都能精準(zhǔn)捕捉環(huán)境信息。
這種多傳感器融合方案,為車輛構(gòu)建了一座“海量數(shù)據(jù)底座”,使得系統(tǒng)能夠獲取更豐富、準(zhǔn)確的實(shí)時(shí)場景信息。不論是高速行駛中的動(dòng)態(tài)路況,還是停車場等封閉區(qū)域內(nèi)的微小障礙,均能通過高清攝像頭、毫米波雷達(dá)與激光雷達(dá)協(xié)同感知得到有效監(jiān)測(cè)。多傳感器的高精度數(shù)據(jù)采集還為后續(xù)的物理世界建模提供了豐富素材。通過實(shí)時(shí)采集車輛周邊的圖像、距離和運(yùn)動(dòng)信息,系統(tǒng)得以形成對(duì)復(fù)雜交通環(huán)境的整體認(rèn)知,從而為后續(xù)的決策規(guī)劃奠定堅(jiān)實(shí)基礎(chǔ)。
數(shù)據(jù)處理決定智駕能力上限
要讓智能駕駛系統(tǒng)真正“看懂”周圍的世界,僅僅依賴硬件采集數(shù)據(jù)遠(yuǎn)遠(yuǎn)不夠。更為關(guān)鍵的是如何將這些零散的信息進(jìn)行整合、解讀并最終轉(zhuǎn)化為可執(zhí)行的駕駛決策,這就對(duì)數(shù)據(jù)處理能力提出了很高的要求。小米在這一過程中構(gòu)建了一個(gè)完整的物理世界建模體系,這一體系主要分為三個(gè)層次,即數(shù)據(jù)觀測(cè)層、隱式特征層和顯式符號(hào)層。

小米“三層建模”架構(gòu)的物理世界模型
數(shù)據(jù)觀測(cè)層相當(dāng)于系統(tǒng)的“眼睛”。數(shù)據(jù)觀察層與傳統(tǒng)架構(gòu)中的感知結(jié)構(gòu)相似,主要用于查勘路況、收集交通信息。小米HAD(智能駕駛系統(tǒng))同時(shí)采集來自11顆高清攝像頭、毫米波雷達(dá)與激光雷達(dá)的數(shù)據(jù),實(shí)時(shí)捕捉車輛周圍360°內(nèi)的包含圖像、激光雷達(dá)點(diǎn)云以及領(lǐng)航功能所需要的導(dǎo)航信息等。這個(gè)層次將分散的傳感器信號(hào)整合成可供后續(xù)處理的數(shù)據(jù)流,為系統(tǒng)提供了第一手的真實(shí)、多維度場景狀態(tài)信息。
隱式特征層則類似于系統(tǒng)的“思考大腦”。隱式特征層與傳統(tǒng)架構(gòu)中的決策層類似,在這一層,系統(tǒng)對(duì)從數(shù)據(jù)觀測(cè)層獲得的原始數(shù)據(jù)進(jìn)行處理和分析,通過深度神經(jīng)網(wǎng)絡(luò)提取出隱藏在大量數(shù)據(jù)背后的特征和規(guī)律。這些隱式特征雖然不易直接被人類理解,但卻包含了對(duì)周邊車輛、行人等目標(biāo)的精細(xì)判別信息。借助強(qiáng)大的模型推理能力,系統(tǒng)甚至能夠恢復(fù)部分被遮擋區(qū)域的信息,為決策提供更為全面的依據(jù)。
顯式符號(hào)層則起到了“翻譯官”的作用,即將復(fù)雜的數(shù)據(jù)信息以人類可以理解的樣式展現(xiàn)出來。它將隱式特征層提取出的模糊信息轉(zhuǎn)化為人類可直接理解的符號(hào)或標(biāo)簽,從而實(shí)現(xiàn)對(duì)模型輸出結(jié)果的直觀判別。通過這種方式,系統(tǒng)不僅能夠?qū)γ恳豢赡艿男旭傑壽E進(jìn)行安全性、舒適性、高效性等多維度的評(píng)估,還可以不斷優(yōu)化模型,使得最終輸出的決策更加精準(zhǔn)可靠。這種端到端的建模方法,不僅簡化了傳統(tǒng)系統(tǒng)中模塊之間的數(shù)據(jù)交互流程,更大幅提高了在動(dòng)態(tài)變化環(huán)境中的反應(yīng)速度和決策準(zhǔn)確性。
此外,為應(yīng)對(duì)物理世界中時(shí)間維度的動(dòng)態(tài)變化,小米還嘗試將三層模型進(jìn)行聯(lián)合時(shí)序建模。在云端,利用未來幀數(shù)據(jù)作為自監(jiān)督信號(hào)不斷參與訓(xùn)練;而在車端,實(shí)時(shí)優(yōu)化的模型則可以迅速適應(yīng)各種突發(fā)情況。這種協(xié)同進(jìn)化的設(shè)計(jì),使得小米智能駕駛系統(tǒng)在不斷學(xué)習(xí)與進(jìn)化中,逐步實(shí)現(xiàn)了對(duì)復(fù)雜場景的精準(zhǔn)判斷與快速反應(yīng)。
其實(shí)早在去年3月,小米SU7的智能駕駛系統(tǒng)就已具備高速領(lǐng)航、主動(dòng)安全、代客泊車以及輔助泊車等先進(jìn)功能。而在隨后的OTA升級(jí)過程中,系統(tǒng)不斷解鎖城區(qū)場景,從最初覆蓋部分城市擴(kuò)展至中國大陸全域,實(shí)現(xiàn)了HAD端到端全場景智能駕駛功能的全量推送。在2023年12月28日的汽車技術(shù)發(fā)布會(huì)上,小米首次公開了變焦BEV技術(shù)、超分辨率OCC技術(shù)以及感知決策一體模型等一系列核心關(guān)鍵技術(shù)。這些技術(shù)的公開不僅證明了小米在智能駕駛研發(fā)上的深厚積累,更展示了其未來在自動(dòng)駕駛領(lǐng)域的無限可能。憑借對(duì)物理世界建模能力的不斷提升以及深度工程優(yōu)化,小米智能駕駛系統(tǒng)正完成從“高精地圖+模塊架構(gòu)”,到“無圖+模塊架構(gòu)”,再到“端到端架構(gòu)”的跨越式演進(jìn)。
-
智能駕駛
+關(guān)注
關(guān)注
5文章
3029瀏覽量
51361 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14954瀏覽量
181119 -
小米汽車
+關(guān)注
關(guān)注
1文章
350瀏覽量
7107
發(fā)布評(píng)論請(qǐng)先 登錄
為什么一段式端到端自動(dòng)駕駛很難落地?

端到端與模塊化自動(dòng)駕駛的數(shù)據(jù)標(biāo)注要求有何不同?

端到端自動(dòng)駕駛仿真新范式:aiSim如何解決智駕測(cè)試的"災(zāi)難性挑戰(zhàn)"

如何訓(xùn)練好自動(dòng)駕駛端到端模型?

端到端智駕模擬軟件推薦:為什么aiSim是業(yè)界領(lǐng)先的自動(dòng)駕駛模擬平臺(tái)?
端到端智駕仿真軟件推薦:全球首款A(yù)SIL-D認(rèn)證平臺(tái)助您突破自動(dòng)駕駛測(cè)試瓶頸
端到端智駕模擬軟件推薦——為什么選擇Keymotek的aiSim?
自動(dòng)駕駛中“一段式端到端”和“二段式端到端”有什么區(qū)別?

自動(dòng)駕駛端到端大模型為什么會(huì)有不確定性?

黑芝麻智能端到端全棧式輔助駕駛系統(tǒng)的應(yīng)用場景
端到端發(fā)展趨勢(shì)下,云算力如何賦能智能駕駛技術(shù)躍遷?

自主工具鏈助力端到端組合輔助駕駛算法驗(yàn)證

為什么自動(dòng)駕駛端到端大模型有黑盒特性?

為何端到端成為各車企智駕布局的首要選擇?
一文帶你厘清自動(dòng)駕駛端到端架構(gòu)差異




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論