 突破帶寬與延遲! 無人機對決從電子干擾到“撒網”與“竹竿捅機”的奇招轉變
突破帶寬與延遲! 無人機對決從電子干擾到“撒網”與“竹竿捅機”的奇招轉變

無人機機動靈活的攻擊效果十分突出,因此針對無人機的干擾工作從未停止。常用的方法有電子干擾、無人機自殺式阻擊等方式。
但各方為了降低自身損失,同時不斷規避電子干擾,傳統的圖像處理打擊技術重新受到重用。
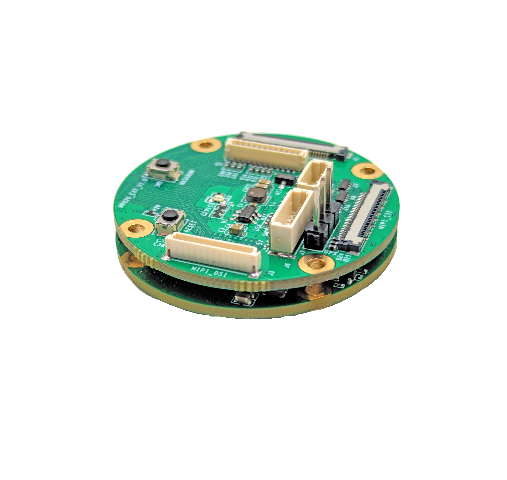
在無人機攝像頭的基礎上加裝圖像處理板,板卡在算法的作用下,能夠識別飛行的無人機,這種方式可以有效降低電子干擾對無人機的影響,同時又能精準鎖定無人機,為后續的攻擊作基礎準備。
但是,由于小型無人機無法攜帶大量彈藥,如何打擊對方無人機也是一個難點。
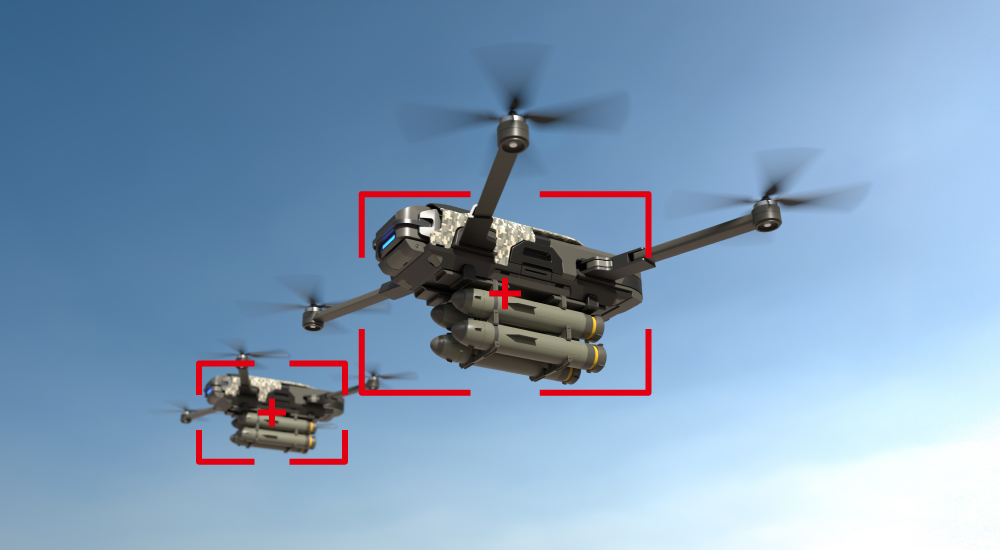
腦洞大開的各方給出了兩種方式,這兩種方式都基于圖像識別的鎖定跟蹤。一個是利用無人機裝載小型投擲物,例如撒網的形式,將對方無人機強制下線。
另一個方法是采用“竹竿捅飛機”的方法,在無人機前端固定一根竹竿,通過圖像識別鎖定跟蹤目標后,能夠主動加速追擊目標,然后將竹竿伸向對方無人機的槳葉,從而達到損壞槳葉,迫降無人機的目的。
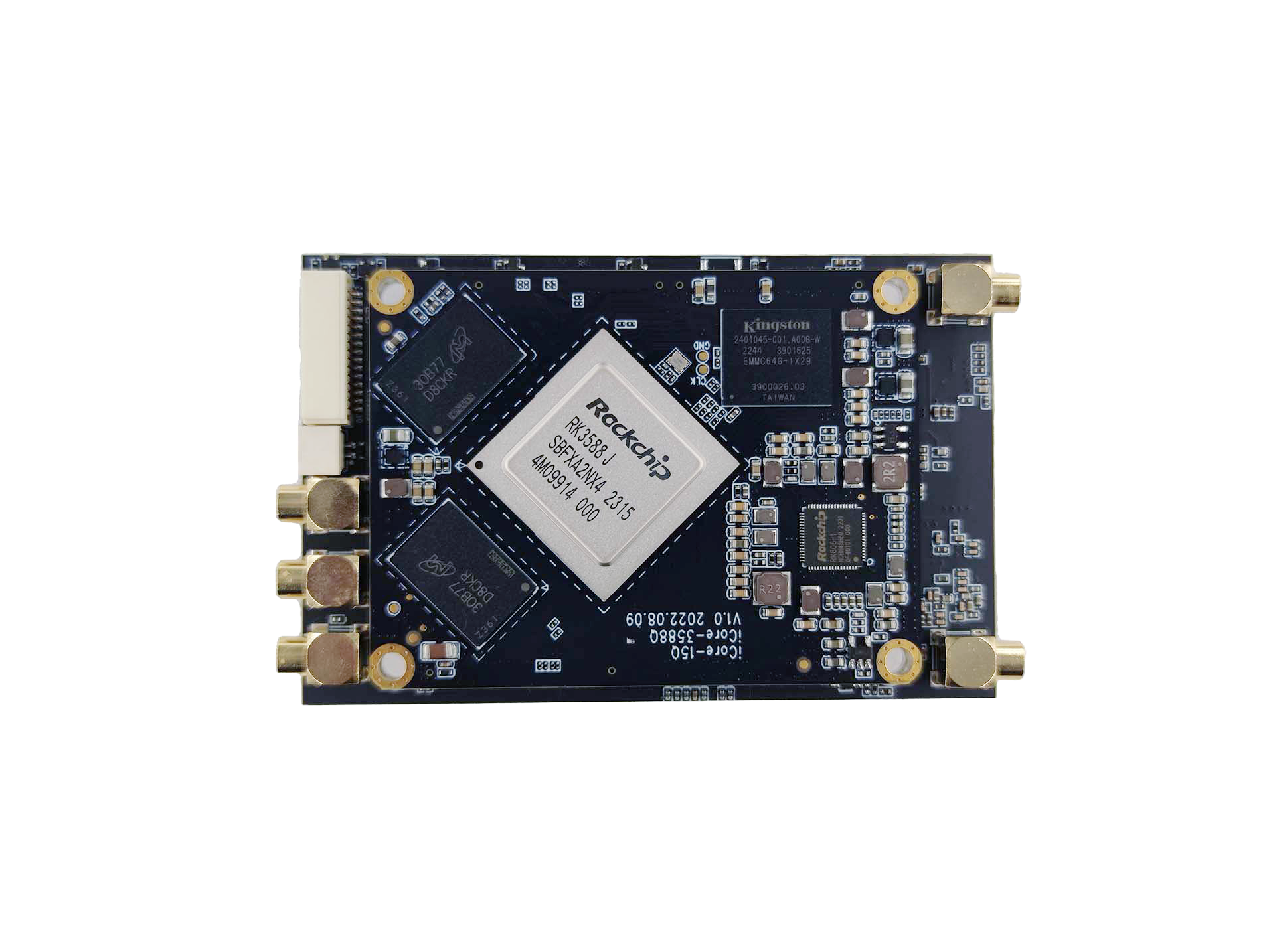
這兩種模式都需要減少電子干擾,同時提高作用距離,前者可以采用慧視光電開發的RV1126芯片打造的Viztra-LE026圖像處理板和RK3588開發而成的Viztra-HE030圖像處理板進行目標的分類識別、鎖定跟蹤打擊。
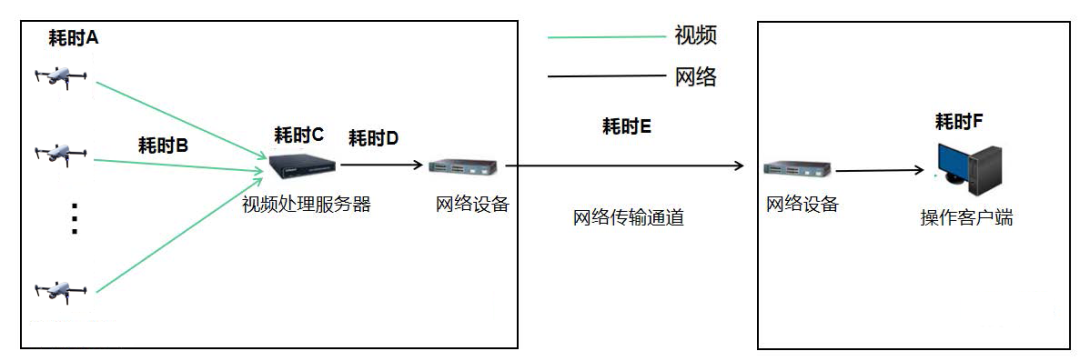
剩下的就是作用距離的問題,這類穿越機通常作用距離有限,一方面是帶寬不足,另一方面是整個無人機控制鏈路的延遲過高。因此低延遲、窄帶寬對于這兩項技術幫助極大。
慧視光電推出的基于RV1126和RK3588的低延遲圖傳解決方案就可以很好地解決這個問題。
方案將慧視GS遠程可視化低延遲實時控制系統和圖像處理板深度融合,實現低延遲控制無人機目標識別干擾打擊。
方案功能如下:
(1)在一個窄帶收發信道內,例如在信道有效帶寬0.5Mb/s~2Mb/s內,多路視頻和交互控制共用一對收發信道,信道支持數據透傳,外部系統可以使用該信道,傳輸任意格式的數據;
(2)可實時調整視頻碼率,在低至500K帶寬情況下依然可以回傳清晰流暢的圖像,使無人設備飛得更遠;
(3)可實現視頻中繼轉發;
(4)能夠基于H265實時視頻編碼;
(5)可實現基于視頻流的“人在回路低延遲控制”。基于普通60幀相機,實現15ms的低延遲編解碼,加上數據鏈傳輸延遲時間在30ms左右,目前業界領先。通用性強,使用更加靈活,適用更多應用場景;
(6)支持多路SDI視頻在低至500K帶寬情況下的同時傳輸(1080P 60FPS),徹底解決“帶寬苦惱”;
(7)整體時延約60ms(含相機、編解碼、顯示,不含傳輸),實現實時控制打擊。
這樣既能夠保障無人機的圖像識別能力,又能滿足帶寬和低延遲控制的需求,使得這兩種無人機對抗方式得以實現,同時在對抗中占得優勢。
-
帶寬
+關注
關注
3文章
1040瀏覽量
43352 -
無人機
+關注
關注
235文章
11298瀏覽量
195598 -
電子干擾
+關注
關注
0文章
10瀏覽量
9920
發布評論請先 登錄
偏遠地區帶寬不足 應急無人機該如何穩定工作?

這種類型的無人機,抗干擾能力超強
低延遲,低帶寬,6T算力,應急救援無人機控制穩定性模塊

無人機自動巡檢系統:從手動操作到智能化的技術變革
離軸技術:賦能無人機精準配送的核心芯片應用
RK3576賦能無人機巡檢:多路視頻+AI識別引領智能化變革
為什么IMU是無人機穩定控制的的核心?
科普|無人機反制槍介紹

RV1126系列Viztra-LE044圖像處理板 無人機反制專用AI模塊
低空物流:無人機開啟未來配送新篇章
從偵測到反制:Cincoze 工控機強化無人機威脅應對力
肇觀電子兩款無人機視覺避障模組量產交付
磐啟微電子PAN3029芯片在無人機上的應用




 工商網監
工商網監
評論