 低延遲,低帶寬,6T算力,應急救援無人機控制穩定性模塊
低延遲,低帶寬,6T算力,應急救援無人機控制穩定性模塊

無人機在應急救援中承擔著搜集信息、通信保障等任務,為地面救援指揮中心提供決策支撐信息。
但是當災害發生時,通信通常會受到破壞,另外像高原、山區這種環境中,信號本身就受限,即便不受破壞,也難以支撐大量通信需求。因此,在無人機執行任務時,如何保障地面與無人機的通信穩定至關重要。
帶寬問題
如果受災面積大,就需要多架無人機同時作業收集信息,將會占用大量帶寬。而災區的通信大都會受到破壞,并且地面通信也會需要占用帶寬,無人機飛行任務的穩定性就會受到影響。
延遲問題
當無人機飛得遠飛得高時,無人機控制、回傳數據的延遲就會增加,而災難面前,時間就是生命,越是實時的數據越能夠為救援指揮提供緊急決策依據。

這樣的需求,成都慧視推出的Viztra-HS063 AI圖像處理模塊剛好可以解決,該模塊不同于之前推出的AI圖像處理板,它除了具備圖像處理板能夠檢測識別跟蹤地面目標,輸出靶量信息的能力外,它還集成了LLSM低延遲低帶寬流媒體傳輸系統,具備在50ms左右低延遲環境下(不含數據鏈)控制應急救援無人機進行作業,并且同時控制4路無人機帶寬占用最低500Kbps的能力。
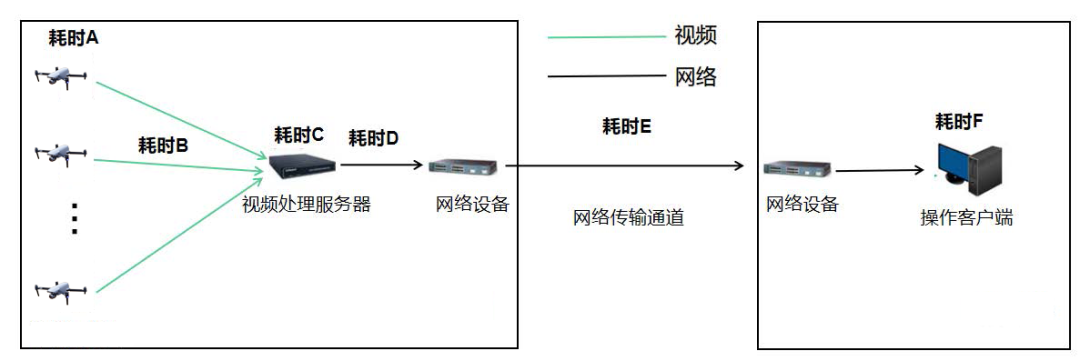
模塊采用瑞芯微RK3588s作為主處理器,算力達到6T,可以快速處理復雜場景。設計1路MIPI+2路CVBS作為輸入接口,并且考慮到無人機負重、續航等問題,模塊采用極致設計,外形尺寸55*40mm,重量僅24.5g(帶外殼40g左右),功耗不高于 6W。

搭載模塊后,無人機在執行任務時,通信更穩定,延遲更低,也就可以飛得更遠,傳輸數據更及時。面對高海拔、復雜山地等極端地理條件,解決信息傳輸問題,為災情研判、科學調配救援資源提供信息。
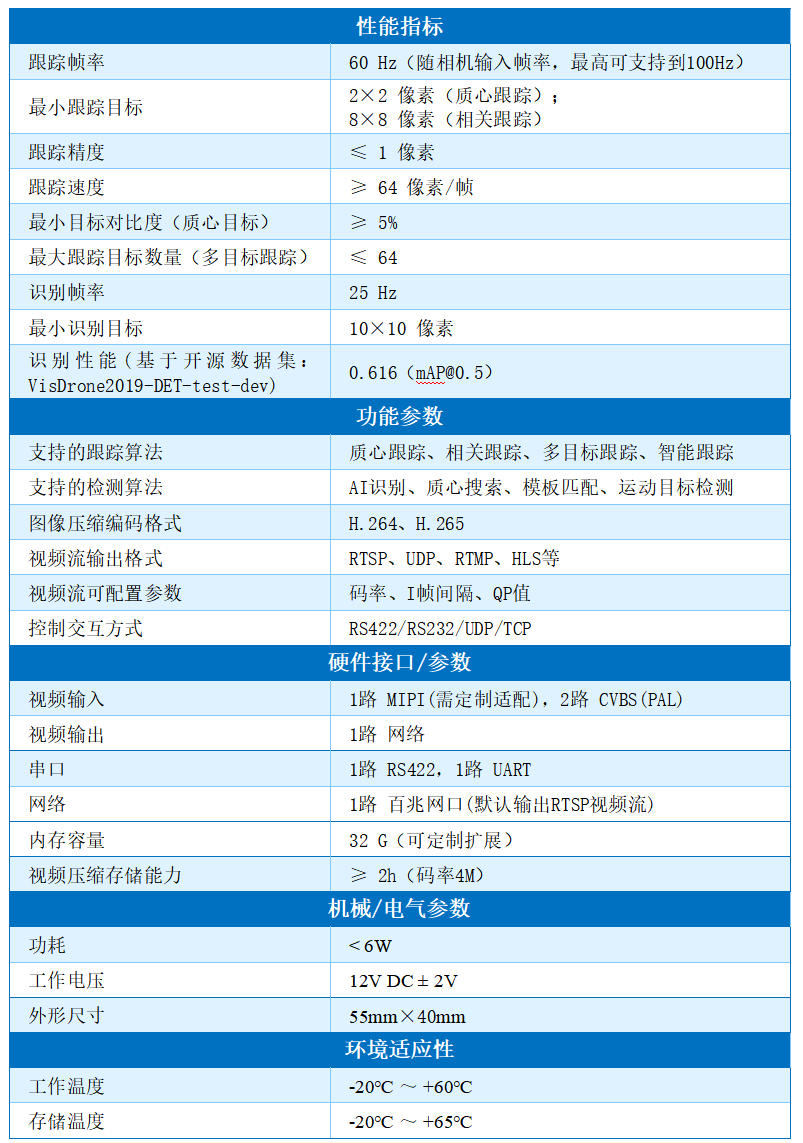
模塊參數
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
無人機
+關注
關注
236文章
11343瀏覽量
196230 -
算力
+關注
關注
2文章
1584瀏覽量
16811
發布評論請先 登錄
相關推薦
熱點推薦

基于無人機搭載FCB - EV9520L機芯的可視化應急指揮系統
在應急救援領域,時間與信息的精準傳遞對救援效率和成效起著決定性作用。傳統應急指揮系統常面臨固定視角、視頻傳輸清晰度低等問題,難以滿足復雜場景下的實時指揮需求。隨著
6T算力,120FPS高幀頻,高速無人機AI模組推薦
高速無人機移動快,所面臨的環境復雜,因此對于AI模組的選擇有著較高的要求。高算力的AI模塊能夠快速應對復雜環境,而高幀頻的相機能夠獲取更多的數據細節,便于AI

MT6835:寬溫區、低延遲絕對值編碼器,提升運動控制穩定性
在工業運動控制的舞臺上,編碼器就像是一位精密的“情報員”,為系統提供準確的位置和速度信息。而今天要介紹的 MT6835 絕對值編碼器,更是憑借其寬溫區、低延遲的獨特優勢,成為提升運動控制
低延遲高帶寬電機驅動方案優化手持云臺動態響應與姿態穩定性
在當今影像拍攝領域,手持云臺已成為專業攝影師和內容創作者不可或缺的設備。隨著4K/8K超高清視頻、VR全景拍攝等技術的普及,用戶對云臺動態響應速度和姿態穩定性的要求越來越高。這直接推動了電機驅動技術的革新,低延遲高
SDI編碼板+FCB-EV9520L:應急救援無人機的“穿透視覺”新方案
在災害救援的緊急時刻,時間就是生命。無論是濃煙滾滾的火災現場、坍塌的建筑廢墟,還是被洪水淹沒的村莊,救援隊需要快速穿透復雜環境,精準定位幸存者或危險源。索尼FCB-EV9520L模組搭配SDI編碼板,通過4K高清成像與穩定傳輸技
為什么IMU是無人機穩定控制的的核心?
在無人機從消費級向工業級/行業級跨越的過程中,"精準" 與 "穩定" 成為核心競爭力,這依賴于底層慣性測量技術的突破。IMU是無人機穩定
愛普生M-G370PDF復雜地形下無人機飛行的卓越應用
變得極為惡劣,面臨著諸多挑戰,包括信號干擾、氣流不穩定、障礙物繁多等,這對無人機的飛行穩定性、導航精度和姿態控制提出了嚴苛要求。愛普生M-G370PDF慣性測量單元

低空物流:無人機開啟未來配送新篇章
。
空中外賣員、空中快遞員成為年輕人追逐的新賽道,考取空中駕駛證正成為潮流。從城市白領的即時外賣到山區村民的快遞包裹,低空物流讓“萬物皆可送”成為現實。在緊急救援、醫療物資配送等場景中,無人機物流展現出
發表于 07-04 10:42
石英晶振在無人機領域的應用
城市管理、應急救援、物流配送等民用場景,成為智慧城市建設的關鍵工具。石英晶振—精準保障無人機飛行無人機的穩定飛行,離不開精密電子系統的協同運作。石英晶振作為核心的頻率控

晶振化身空中交警,為無人機飛行保駕護航
城市管理、應急救援、物流配送等民用場景,成為智慧城市建設的關鍵工具。石英晶振:精準保障無人機飛行無人機的穩定飛行,離不開精密電子系統的協同運作。石英晶振作為核心的頻率控

正方科技歐荷18S30AH智能電池在大載重無人機中的應用
在無人機技術蓬勃發展的今天,大載重無人機已成為農業、物流、應急救援等領域的“空中力量”。而作為其核心動力源,電池的性能直接決定了無人機的載重能力、飛行效率與作業
LLSM——基于RK3588的低延遲低帶寬流媒體傳輸模塊
隨著物聯網和人工智能的快速發展,實時視頻傳輸在嵌入式系統中變得越來越重要。無論是智能攝像頭、無人機還是工業監控設備,都需要高效、低延遲的流媒體傳輸解決方案。慧視推出的LLSM低
如何通過PCB優化提升無人機信號穩定性?
隨著無人機技術的快速發展,高性能PCB(印刷電路板)成為無人機制造商的核心需求之一。無論是消費級無人機還是工業級應用,PCB的質量直接影響飛行控制、信號傳輸和整機



 工商網監
工商網監
評論