") 為什么IMU是無人機(jī)穩(wěn)定控制的的核心?
為什么IMU是無人機(jī)穩(wěn)定控制的的核心?

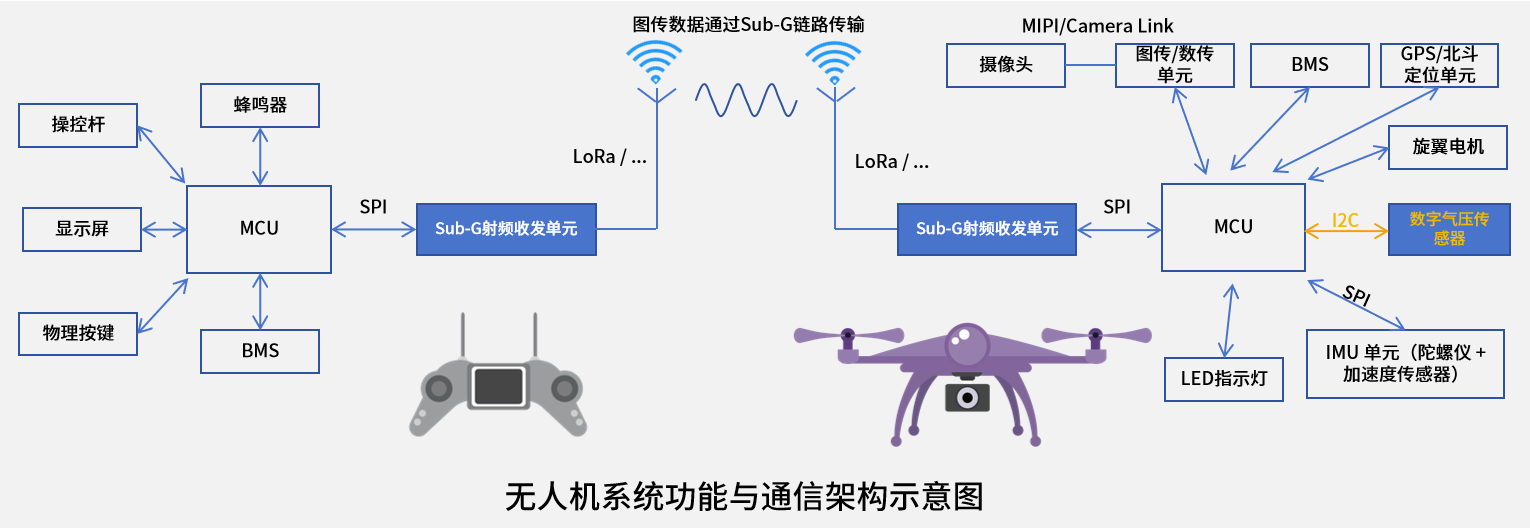
在無人機(jī)從消費(fèi)級向工業(yè)級/行業(yè)級跨越的過程中,"精準(zhǔn)" 與 "穩(wěn)定" 成為核心競爭力,這依賴于底層慣性測量技術(shù)的突破。IMU是無人機(jī)穩(wěn)定控制的核心,它直接、實(shí)時、高頻地測量無人機(jī)在三維空間中運(yùn)動狀態(tài)的慣性數(shù)據(jù)(角速度、加速度),為飛控系統(tǒng)提供了閉環(huán)控制所必需的反饋信號。
ER-MIMU-M02 作為十軸 MEMS IMU(三軸陀螺儀 + 三軸加速度計(jì) + 三軸磁力計(jì) + 氣壓計(jì)),正以其微機(jī)械技術(shù)定義無人機(jī)在各類復(fù)雜場景下的作業(yè)邊界。
內(nèi)置的MEMS陀螺儀2°/h零偏不穩(wěn)定性,0.15mg零偏重復(fù)性;加速度計(jì)24μg的零偏不穩(wěn)定性與0.02m/s√h 隨機(jī)游走;磁力計(jì)120uGauss的分辨率與50uGauss的噪聲密度;氣壓計(jì)0.1mbar的分辨率。
陀螺儀直接測量無人機(jī)繞其X(俯仰)、Y(橫滾)、Z(偏航)三個軸的角速度。提供最快速、最直接的姿態(tài)變化信息。飛控系統(tǒng)通過實(shí)時積分陀螺儀的角速度數(shù)據(jù),可以估算出無人機(jī)當(dāng)前的俯仰角、橫滾角和偏航角變化趨勢。
加速度計(jì)測量無人機(jī)沿X、Y、Z三個軸的加速度,無人機(jī)在加速、減速等運(yùn)動狀態(tài)下能保障運(yùn)動控制的精準(zhǔn)性。
磁力計(jì)測量無人機(jī)所在位置的地球磁場強(qiáng)度,提供地球磁北的參考方向。
氣壓計(jì)測量無人機(jī)所在位置的大氣壓強(qiáng),過測量氣壓變化,飛控系統(tǒng)可以估算出無人機(jī)的相對高度變化。
為什么是穩(wěn)定控制的核心?
姿態(tài)角(俯仰、橫滾、偏航)和高度是飛控系統(tǒng)進(jìn)行任何穩(wěn)定控制決策的最基本輸入?yún)?shù)。ER-MIMU-M02直接提供了計(jì)算這些參數(shù)所需的原始數(shù)據(jù)。
實(shí)時性要求:無人機(jī)在空中需要極高的控制頻率來維持穩(wěn)定。IMU是所有傳感器中數(shù)據(jù)更新率最高、延遲最低的,能夠滿足飛控實(shí)時計(jì)算和響應(yīng)的需求。GPS等傳感器更新慢,無法單獨(dú)用于高動態(tài)的姿態(tài)控制。
飛控是一個閉環(huán)控制系統(tǒng),IMU提供當(dāng)前姿態(tài)變化的測量值,飛控通過控制算法計(jì)算出需要施加的控制量,電機(jī)執(zhí)行轉(zhuǎn)速改變,控制無人機(jī)的姿態(tài),IMU再次感知變化后的姿態(tài),形成閉環(huán)。沒有IMU提供的實(shí)時反饋,這個閉環(huán)就無法建立,因此IMU是無人機(jī)穩(wěn)定控制的核心。
隨著無人機(jī)向自主決策、集群協(xié)同發(fā)展,ER-MIMU-M02 的技術(shù)儲備已預(yù)留升級空間:SPI 從機(jī)模式的高速數(shù)據(jù)傳輸,可與無人機(jī)飛控系統(tǒng)實(shí)現(xiàn)數(shù)據(jù)交互,為實(shí)時避障、動態(tài)路徑規(guī)劃提供低延遲支持;而 50g 的輕量化設(shè)計(jì)與 47×44×14mm 的緊湊尺寸,適配各類中小型無人機(jī)的載荷需求。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2577文章
55279瀏覽量
792889 -
無人機(jī)
+關(guān)注
關(guān)注
236文章
11348瀏覽量
196258 -
IMU
+關(guān)注
關(guān)注
6文章
421瀏覽量
48040
發(fā)布評論請先 登錄
無人機(jī)IMU 雙核心深度解析:加速度計(jì)與陀螺儀的分工、價(jià)值及融合邏輯

數(shù)字氣壓傳感器,如何破解無人機(jī)高度控制的精度難題?
無人機(jī)操控核心:智能飛行的技術(shù)引擎
離軸技術(shù):賦能無人機(jī)精準(zhǔn)配送的核心芯片應(yīng)用
無人機(jī)為什么能穩(wěn)定飛行?IMU功不可沒
MEMS陀螺如何成為無人機(jī)穩(wěn)定飛行的核心?
微型化IMU如何突破無人機(jī)與機(jī)器人的性能邊界?
IMU的精度對無人機(jī)姿態(tài)控制意味著什么?
使用高精度IMU對無人機(jī)系統(tǒng)有何提升?
IMU 能為無人機(jī)提供什么數(shù)據(jù)?
為什么高端無人機(jī)不會在IMU精度上妥協(xié)?
適用于無人機(jī)的 IMU 有哪些要求?

石英晶振在無人機(jī)領(lǐng)域的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論