 九軸姿態傳感器的介紹和應用
九軸姿態傳感器的介紹和應用

總體設計
姿態傳感器是基于MEMS技術的高性能三維運動姿態測量系統。它包含三軸陀螺儀、三軸加速度計,三軸電子羅盤等運動傳感器,通過內嵌的低功耗ARM處理器得到經過溫度補償的三維姿態與方位等數據。利用基于四元數的三維算法和特殊數據融合技術,實時輸出以四元數、歐拉角表示的零漂移三維姿態方位數據。
姿態傳感器內部采用高分辨力差分數模轉換器,內置自動補償和濾波算法,最大程度減小了環境變化引起的誤差。把靜態重力場的變化轉換成傾角變化,通過數字方式直接輸出當前的橫滾角和俯仰角,產品安裝方便、使用簡單、體積小、抗外界電磁干擾、承受振動沖擊能力強。
?

??姿態傳感器通過采集傳感器的數據,融合卡拉曼濾波,輸出實時的姿態數據。由于采用三軸加速度計和三軸磁傳感器輔助陀螺以及溫度補償的算法技術,使得該產品實現全姿態優異的穩定性和實時性。該產品不僅能輸出姿態數據,還能輸出三軸加速度計,三軸陀螺儀以經三軸磁場9軸數據,適用各種應用平臺。
硬件設計
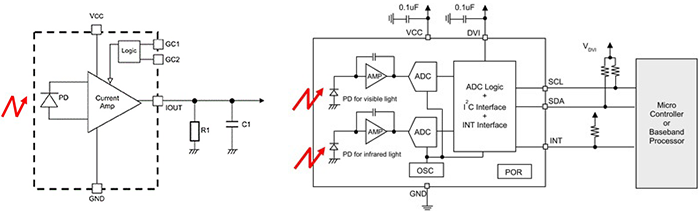
如下圖所示為系統硬件總框圖
?
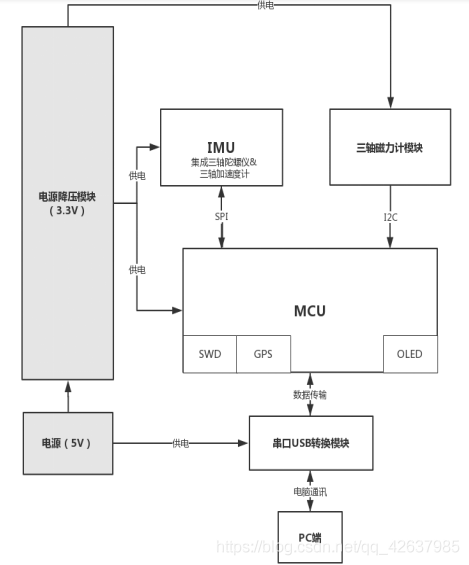
?主要分為電源模塊、單片機模塊、磁傳感模塊、加速度傳感模塊和RS-232接口模塊。
?
?
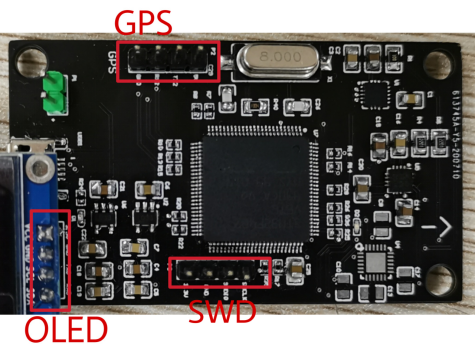
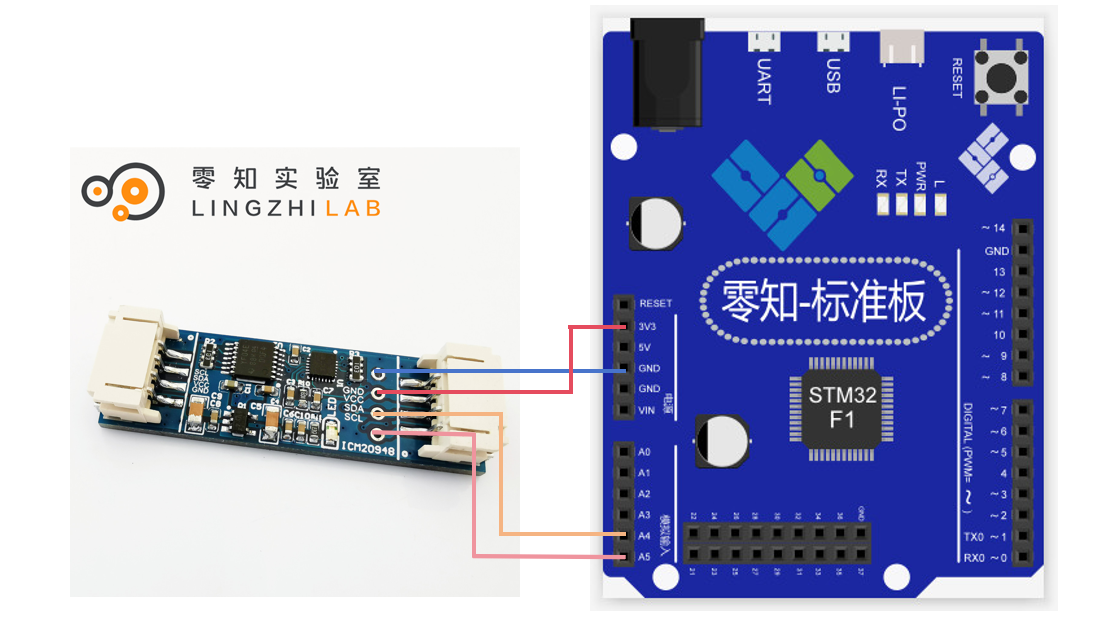
?實體電路板示意圖如上圖所示。
軟件設計
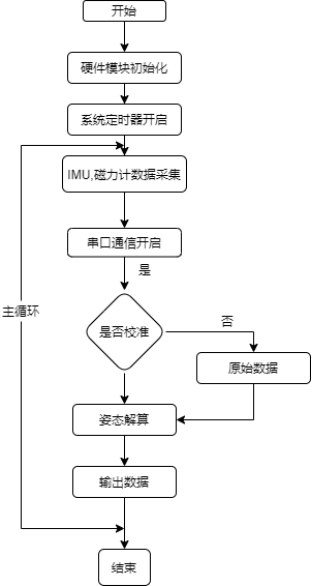
如下圖所示為系統軟件總框架圖
?
?
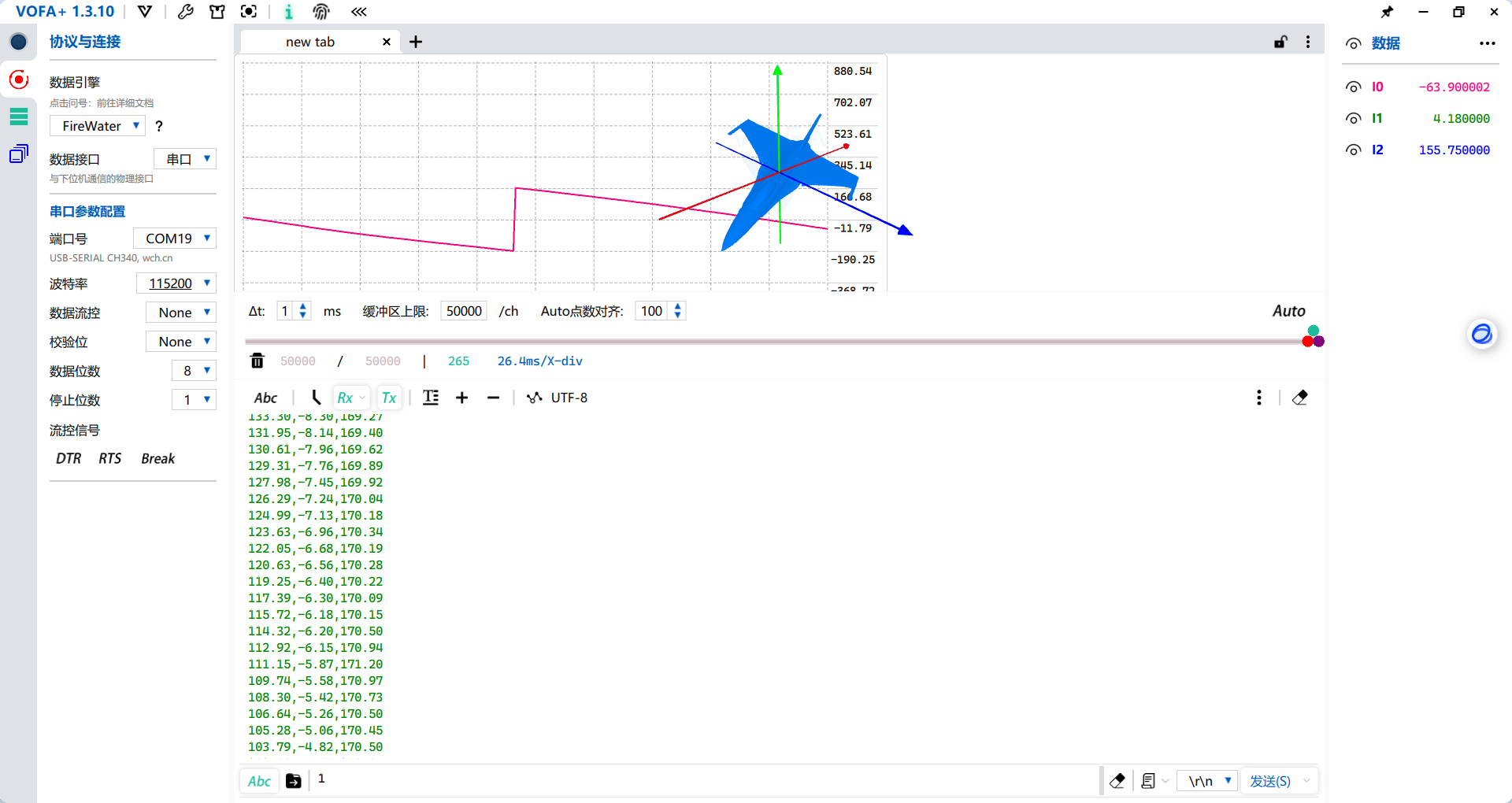
?主要可以分為初始化、采集、通信、解析、輸出等幾個環節,產品配套有成熟的上位機軟件可以很簡便地直接使用,并且可以根據需求進行功能或界面的修改。
應用
姿態傳感器可廣泛應用于航模無人機,機器人,天線云臺,聚光太陽能,地面及水下設備,虛擬現實,人體運動分析等需要低成本、高動態三維姿態測量的產品設備中。
?
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
姿態測量
+關注
關注
0文章
8瀏覽量
8421 -
姿態控制
+關注
關注
0文章
10瀏覽量
7862 -
姿態解算
+關注
關注
0文章
50瀏覽量
8639
發布評論請先 登錄
相關推薦
熱點推薦
CW32L012讀取MPU6050姿態數據
隨著物聯網、可穿戴設備、工業傾角檢測等場景的普及,低成本、低功耗的姿態檢測方案成為嵌入式領域的研究熱點。MPU6050 作為集成三軸加速度計和三軸陀螺儀的六軸

電子工程師必看:PSTI感應式通軸電機轉子位置傳感器解析
電子工程師必看:PSTI感應式通軸電機轉子位置傳感器解析 引言 在電機控制領域,準確獲取轉子軸的角位置、方向和速度信息對于優化電機逆變器控制、實現電機高效驅動至關重要。今天要給大家介紹
新品上市:九軸姿態傳感器!
在智能穿戴、無人機、機器人、VR/AR等高速發展的智能設備領域,精準、穩定、實時的姿態感知能力已成為產品競爭力的關鍵。HLK-AS201-9九軸姿態

無線傾角傳感器:在復雜環境中實現精準姿態感知的可靠選擇
在工業自動化、結構監測、工程機械、智慧農業乃至新能源基礎設施等領域,設備或結構的姿態變化監測正變得日益重要。傳統的有線傾角傳感器雖能滿足基礎需求,但在布線困難、移動頻繁、環境惡劣或需大規模部署的場景

從橋梁監測到無人機調平:雙軸傾角傳感器的無限可能
無論是工業安全、智能出行還是日常設備,雙軸傾角傳感器正在用“角度感知”能力悄然改變世界!核心價值在于:實時監測物體在X/Y軸上的傾斜角度,從而實現預警、調平或自動化控制。 雙軸傾角
SCH1633 6DoF傳感器三大姿態功能
村田推出高精度汽車用6軸慣性傳感器~一顆傳感器可同時用于車輛自身位置推算、車輛姿態測量和前照燈調平~村田已開發出高性能的汽車用6軸慣性力

Littelfuse霍爾傳感器產品介紹
霍爾電流傳感器作為隔離式電流檢測產品,憑借其無插損以及高性價比與穩定性在市場廣泛應用,霍爾傳感器又分為開環與閉環傳感器,閉環采用主動式中和磁場原理可以還原線路的電流從而實現更高精度的檢測,前面文章有

什么是照度傳感器和接近傳感器
近年來,照度傳感器和接近傳感器在我們身邊各類設備中的應用越來越廣泛。除了單獨使用照度傳感器和接近傳感器外,將這些傳感器組合使用的情況也在不斷
1和2軸低場強高精度線性模擬磁敏傳感器@HONEYWELL
霍尼韋爾HMC1001/1002和HMC1021/1022磁傳感器是專為低場強磁感應設計的一軸和雙軸表面貼裝傳感器。通過增加配套信號處理功能,可實現經濟高效的磁力計或羅盤解決方案。這些

0.01°微小變化精準捕捉,機器人姿態傳感器革新
電子發燒友網報道(文/莫婷婷)在人形機器人中,傳感器是實現感知能力的關鍵技術,高性能慣性測量單元(IMU)等姿態檢測傳感器在其中發揮著重要作用。中金研究預計,2030年人形機器人傳感器

零知開源——STM32F103RBT6驅動 ICM20948 九軸傳感器及 vofa + 上位機可視化教程
STM32F1本教程使用零知標準板(STM32F103RBT6)通過I2C驅動ICM20948九軸傳感器,實現姿態解算,并通過串口將數據實時發送至VOFA+上位機進行3D可視化。代碼基
發表于 06-09 14:53
零知開源——STM32F103RBT6驅動 ICM20948 九軸傳感器及 vofa + 上位機可視化教程
本教程使用零知標準板(STM32F103RBT6)通過I2C驅動ICM20948九軸傳感器,實現姿態解算,并通過串口將數據實時發送至VOFA+上位機進行3D可視化。零知開源在軟件方面提
零知經驗——STM32F4驅動ICM20948 九軸運動傳感器 + VOFA上位機可視化驗證與抗漂移優化
核心優化成果:經過系統性調優,將ICM20948的yaw漂移從初始的15°/min降至0.8°/min,動態響應時間縮短40%,搖擺幅度減少75%
一、問題根源:九軸傳感器漂移難題在嵌入式姿
發表于 06-06 10:03
零知經驗——STM32F4驅動ICM20948 九軸運動傳感器 + VOFA上位機可視化驗證與抗漂移優化
通過對ICM20948九軸傳感器的系統性優化,成功將yaw軸漂移從15°/min降至0.8°/min,動態性能提升顯著。硬件層面優化了I2C接線方案和電源去耦設計;軟件方面實施了



 工商網監
工商網監
評論