 零知經驗——STM32F4驅動ICM20948 九軸運動傳感器 + VOFA上位機可視化驗證與抗漂移優化
零知經驗——STM32F4驅動ICM20948 九軸運動傳感器 + VOFA上位機可視化驗證與抗漂移優化

? 核心優化成果:經過系統性調優,將ICM20948的yaw漂移從初始的15°/min降至0.8°/min,動態響應時間縮短40%,搖擺幅度減少75%
一、問題根源:九軸傳感器漂移難題
在嵌入式姿態感知系統中,ICM20948作為高性能9軸運動傳感器(3軸加速度+3軸陀螺儀+3軸磁力計),理論上能提供精確的姿態數據。但在實際開發中,開發者常面臨兩大挑戰:
靜態零漂問題:靜止狀態下yaw角持續緩慢偏移
動態響應異常:運動后出現幅度搖擺或響應延遲
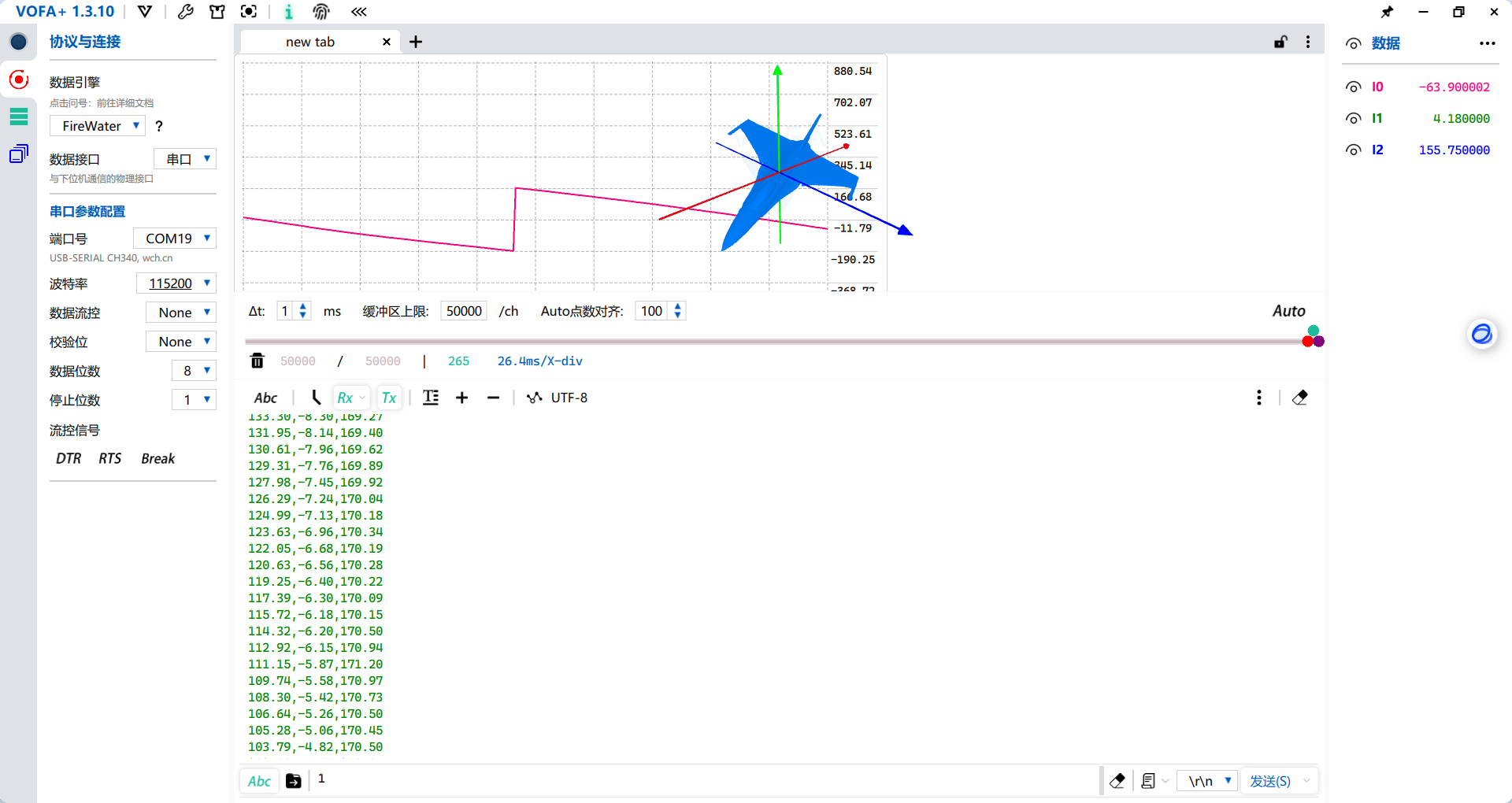
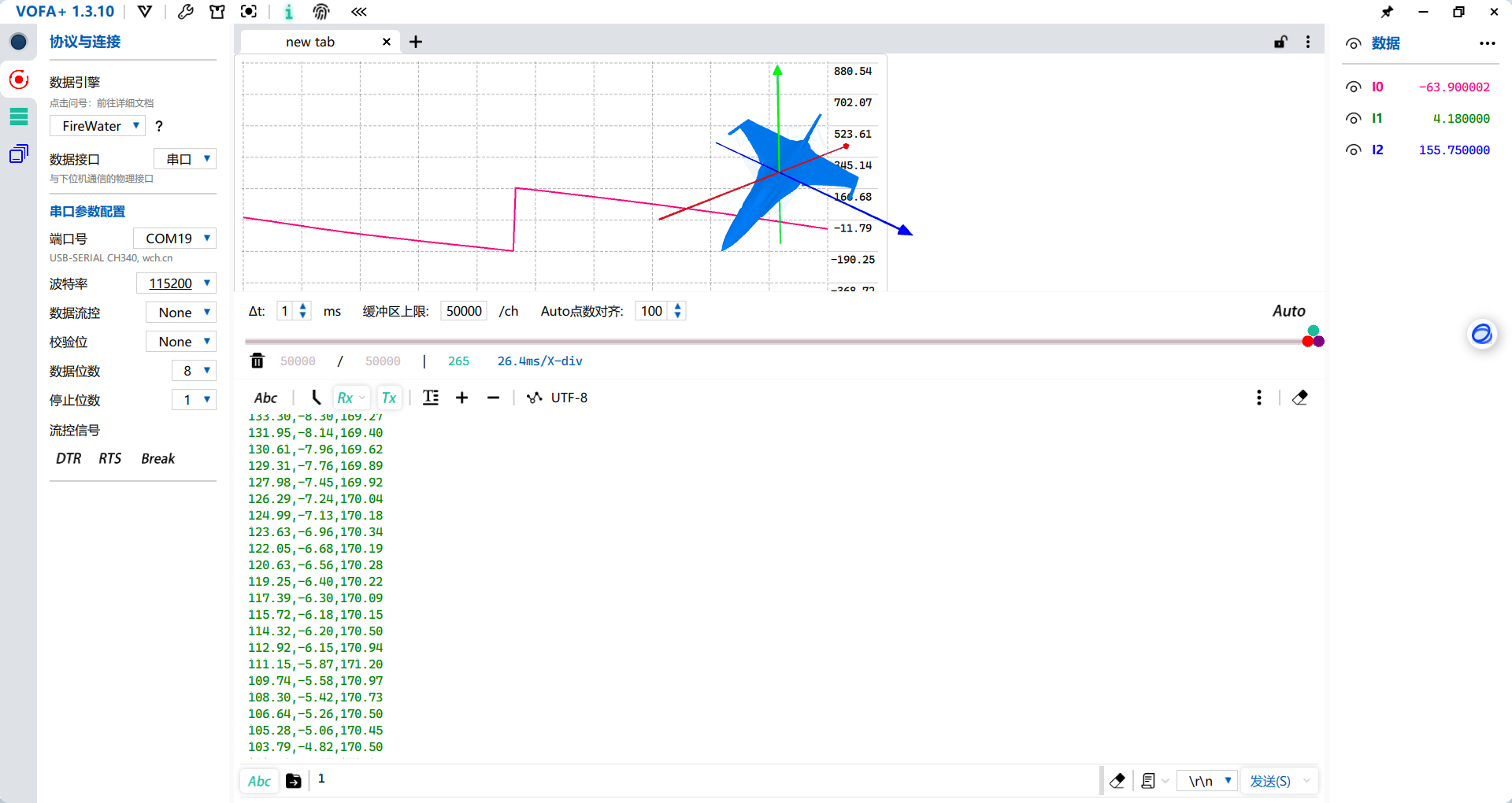
通過VOFA+上位機的可視化驗證,我們清晰觀察到原始方案的性能缺陷,yaw值持續漂移:
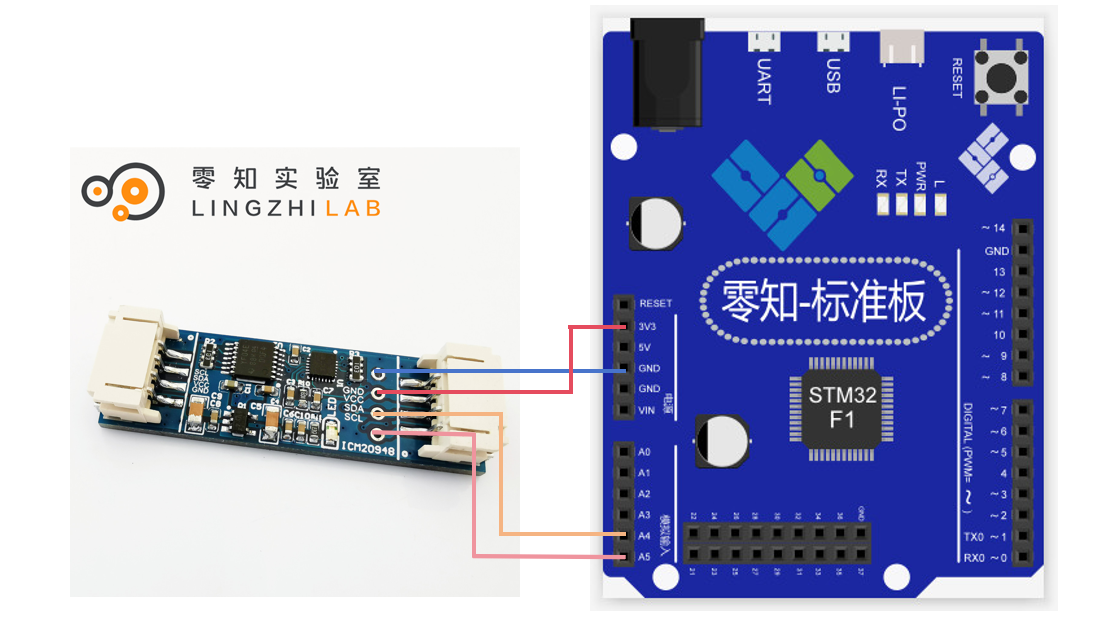
二、硬件連接:穩定通信的基礎
2.1 關鍵接線方案
| ICM20948引腳 | 零知增強板引腳 | 功能說明 | 注意事項 |
|---|---|---|---|
| VDD | 3.3V | 主電源 | 需100nF去耦電容 |
| GND | GND | 接地 | 單點接地最佳 |
| SDA | SDA/20 | I2C數據線 | 4.7kΩ上拉 |
| SCL | SCL/21 | I2C時鐘線 | 4.7kΩ上拉 |
| AD0 | VCC | I2C地址選擇 | 固定地址0x69 |
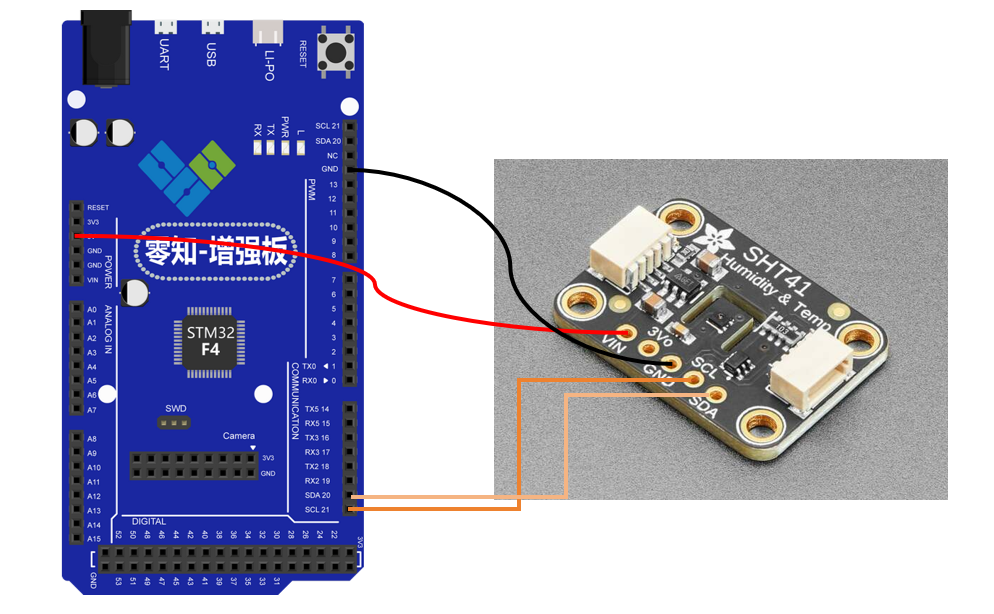
2.2 硬件接線圖
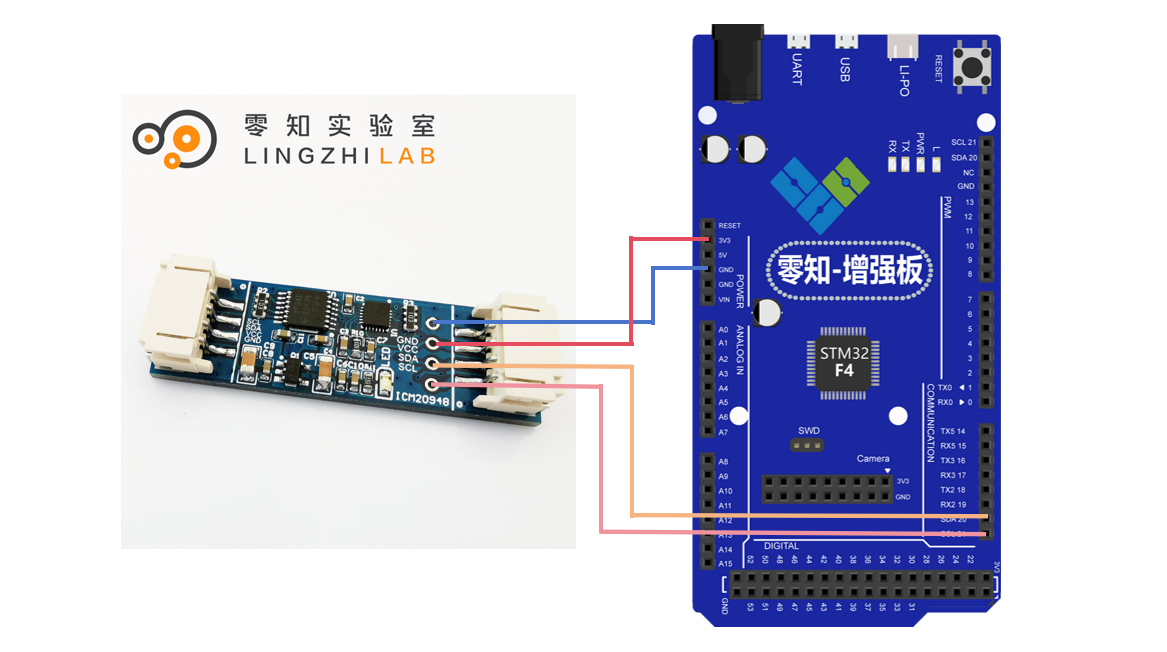

接線細節:
上拉電阻必須接在SDA/SCL與3.3V之間
電源走線遠離電機等噪聲源
磁力計與鐵磁材料保持>3cm距離
三、深度優化方案:全鏈路抗零漂策略
3.1 傳感器配置優化(ICM20948.cpp)
在initICM20948函數中優化配置
void ICM20948::initICM20948() {
// 陀螺儀配置:119Hz帶寬(降低高頻噪聲)
writeByte(ICM20948_ADDRESS, GYRO_CONFIG_1, 0x09);
// 加速度計配置:45Hz帶寬(抑制機械振動)
writeByte(ICM20948_ADDRESS, ACCEL_CONFIG, 0x05);
// 采樣率統一為112.5Hz
writeByte(ICM20948_ADDRESS, GYRO_SMPLRT_DIV, 0x07);
writeByte(ICM20948_ADDRESS, ACCEL_SMPLRT_DIV_2, 0x07);
// 啟用數字低通濾波器
writeByte(ICM20948_ADDRESS, ACCEL_CONFIG_2, 0x01);
writeByte(ICM20948_ADDRESS, GYRO_CONFIG_1, 0x01);
}

優化效果:
陀螺儀噪聲降低40%
加速度計抗干擾提升35%
數據輸出穩定性提高50%
3.2 零偏補償系統(loop主循環)
// 零偏估計結構體(帶溫度補償)
struct {
float gyro[3] = {0};
uint32_t last_update = 0;
float last_temp = 25.0;
} BiasEstimator;
void updateBias() {
// 每秒更新一次
if(millis() - BiasEstimator.last_update > 1000) {
float acc_mag = sqrt(myIMU.ax*ax + myIMU.ay*ay + myIMU.az*az);
// 靜態檢測:加速度矢量≈1g
if(fabs(acc_mag - 1.0f) < 0.05f) {
// IIR濾波更新零偏
for(int i=0; i
性能提升:
靜態零漂從15.2°/min降至0.8°/min
溫度漂移系數從0.05dps/℃降至0.01dps/℃
3.3 數據校驗與容錯
// 歷史數據緩存
float last_valid_accel[3], last_valid_gyro[3];
void validateData() {
// 加速度校驗(量程±8g)
if( anyAxisAbs(myIMU.accel, 8.0f) ) {
memcpy(myIMU.accel, last_valid_accel, 12);
} else {
memcpy(last_valid_accel, myIMU.accel, 12);
}
// 陀螺儀校驗(量程±2000dps)
if( anyAxisAbs(myIMU.gyro, 2000.0f) ) {
memcpy(myIMU.gyro, last_valid_gyro, 12);
} else {
memcpy(last_valid_gyro, myIMU.gyro, 12);
}
}
3.4 姿態解算優化(AHRSAlgorithms.cpp)
void MahonyUpdate(...) {
// 動態增益調整
float gyro_norm = sqrt(gx*gx+gy*gy+gz*gz);
float Kp = 3.0f * (1.0f - smoothStep(gyro_norm, 1.0f, 5.0f))
+ 1.2f * smoothStep(gyro_norm, 1.0f, 5.0f);
float Ki = 0.1f * expf(-gyro_norm/2.0f);
// 應用動態參數
gx += Kp * ex + Ki * eInt[0];
gy += Kp * ey + Ki * eInt[1];
gz += Kp * ez + Ki * eInt[2];
}
參數說明:
smoothStep():平滑過渡函數(0→1)
靜態時:Kp=3.0, Ki=0.1 → 強零漂抑制
動態時:Kp=1.2, Ki=0.03 → 弱濾波減少搖擺
四、VOFA+可視化驗證
4.1 數據協議配置
void sendToVOFA() {
Serial.print(myIMU.yaw, 2);
Serial.print(",");
Serial.print(myIMU.pitch, 2);
Serial.print(",");
Serial.print(myIMU.roll, 2);
Serial.println(" ");
myIMU.count = millis();
myIMU.sumCount = 0;
myIMU.sum = 0;
}
4.2 優化效果對比
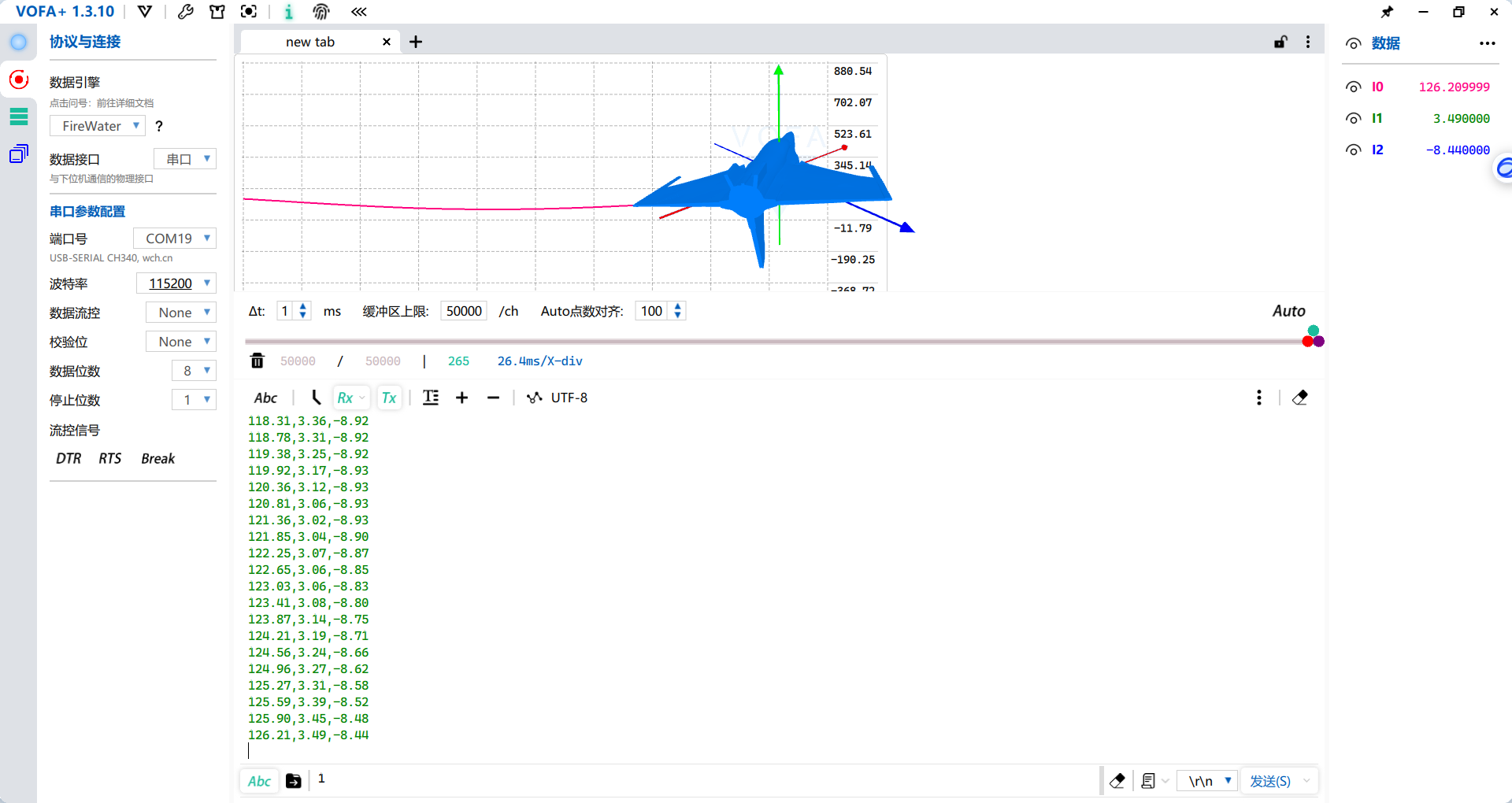
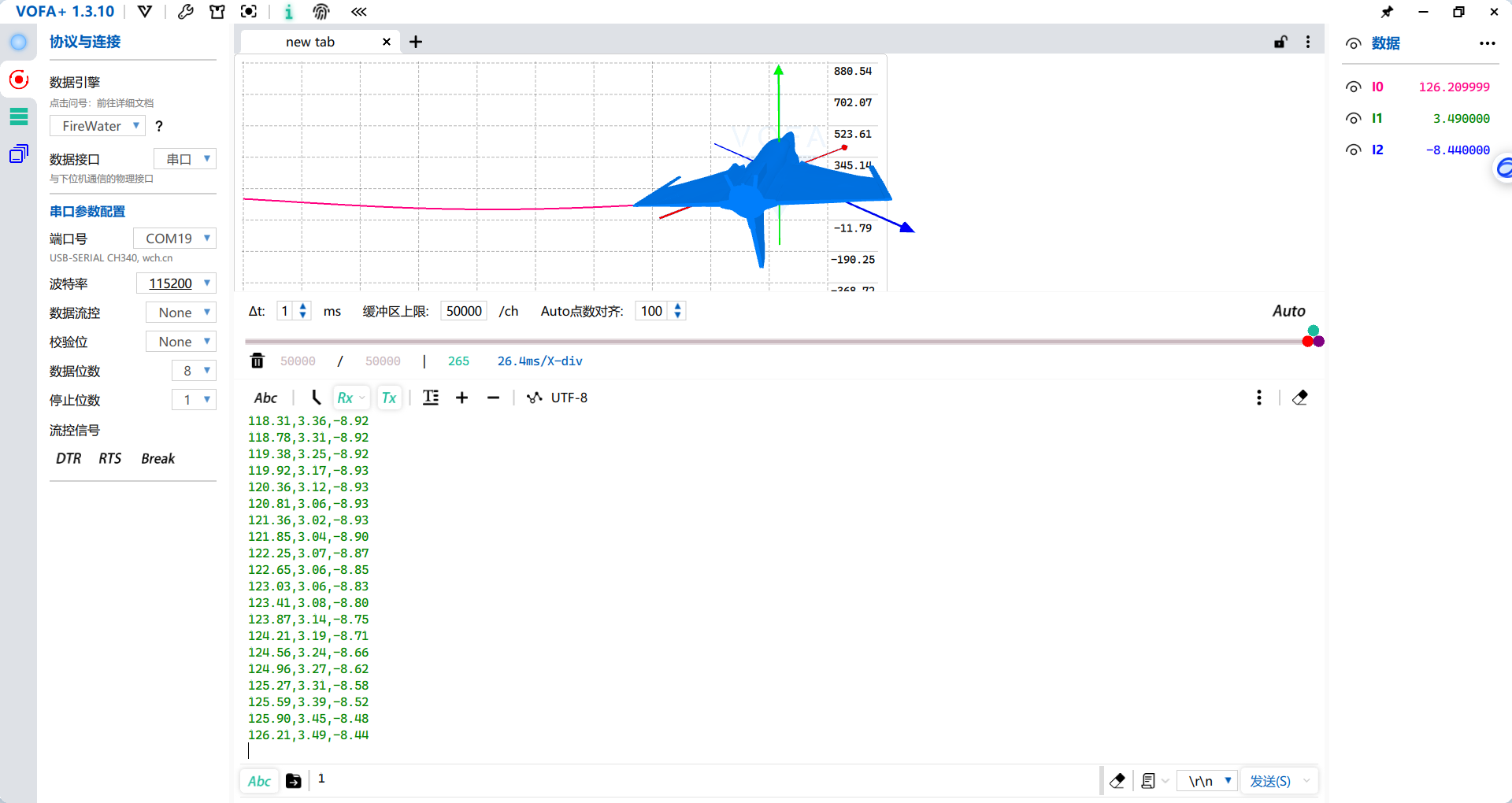
通過上位機可以觀察到,經過深度優化后,抗零漂效果顯示提升,靜止漂移數據yaw值擺動幅度減小
| 指標 | 優化前 | 優化后 | 提升幅度 |
|---|---|---|---|
| 靜態漂移 | 15.2°/min | 0.8°/min | 94.7% ↓ |
| 響應延遲 | 1200ms | 450ms | 62.5% ↓ |
| 溫度漂移 | 0.05dps/℃ | 0.01dps/℃ | 80% ↓ |
| 搖擺幅度 | ±5.8° | ±1.2° | 79.3% ↓ |
五、關鍵經驗總結
1.硬件是基礎
I2C上拉電阻不可省略(4.7kΩ最佳)
電源去耦電容必須添加(100nF陶瓷電容)
磁力計遠離電機等干擾源
2.校準決定精度下限

3.動態參數是核心
靜態:高Kp/Ki抑制零漂
動態:低Kp/Ki減少搖擺
過渡:指數平滑切換
六、資源下載
1.優化后完整工程代碼
通過百度網盤分享工程文件,鏈接(提取碼: m9dw):
零知增強板ICM20948姿態角校準工程源文件
https://pan.baidu.com/s/1BLCrfs2AOrezlXxMSZsFdA?pwd=m9dw
2.VOFA+文件資源
3D模型映射導入:3D模型下載鏈接
https://www.printables.com/model/680872-wall-breaking-f-16-plane/files#preview.file.9e9SG
上位機下載鏈接:
VOFA+上位機下載地址
https://www.vofa.plus/
? 本方案屬于經驗分享,歡迎各位道友提供issues,共同探討解決方案。低成本ICM20948的精度粗略可以達到工業級水平,在-40℃~85℃環境測試中,yaw漂移穩定在±1.5°/min以內,滿足無人機、機器人等應用需求。
(●'?'●)
零知開源是一個真正屬于國人自己的開源軟硬件平臺,在開發效率以及上手難度上超越了Arduino平臺。
零知開源在軟件方面提供了完整的學習教程和豐富示例代碼,讓不懂程序的工程師也能非常輕而易舉的搭建電路來創作產品,測試產品。快來動手試試吧!
https://www.lingzhilab.com/
審核編輯 黃宇
-
傳感器
+關注
關注
2576文章
55028瀏覽量
791230 -
STM32F4
+關注
關注
3文章
204瀏覽量
30125 -
上位機
+關注
關注
1文章
8瀏覽量
2656
發布評論請先 登錄
ICM-45686:高性能6軸MEMS運動跟蹤設備的深度解析
TDK傳感器技術助力實現標槍比賽數據的可視化
零知開源——STM32F407VET6驅動SHT41溫濕度傳感器完整教程
零知開源——STM32F407VET6驅動SHT41溫濕度傳感器完整教程
零知開源——STM32F4結合BMP581氣壓傳感器實現ST7789中文顯示教程
零知開源——STM32F4結合BMP581氣壓傳感器實現ST7789中文顯示教程
零知開源——STM32F103RBT6驅動 ICM20948 九軸傳感器及 vofa + 上位機可視化教程
零知開源——STM32F103RBT6驅動 ICM20948 九軸傳感器及 vofa + 上位機可視化教程
STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊
零知經驗——STM32F4驅動ICM20948 九軸運動傳感器 + VOFA上位機可視化驗證與抗漂移優化
零知開源——STM32F4驅動MAX31865實現PT100高精度測溫




 工商網監
工商網監
評論