 航向姿態參考系統與慣性測量單元的聯系與區別
航向姿態參考系統與慣性測量單元的聯系與區別

?
文章開頭,我們先看兩個術語:航向姿態參考系統(英文簡稱AHRS)和慣性測量單元(英文簡稱IMU)。今天,小編便要圍繞這兩個我們不太熟悉的概念,來為您介紹一下,AHRS和IMU的在利用加速度傳感器、陀螺儀、電子羅盤等傳感器進行慣性測量等方面的聯系與區別,以及它們各自的適用領域。
在這之前,我們還需要先了解一下有關運動方面的一些基本知識。
運動分析簡介
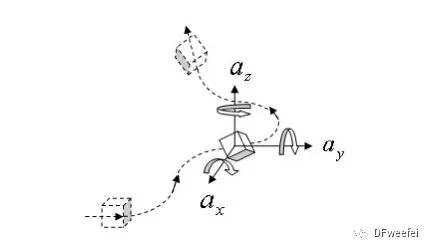
我們知道,在三維空間中若將物體視為剛體(不考慮形變),不管其運動多么復雜,都可以將該運動分解為該物體質心的曲線運動和繞質心的旋轉運動。該曲線運動通常可以用運動初始條件和加速度表示為:

?

而旋轉運動的角度可以用角速度和時間的方程式進行表示。在實際運動測量跟蹤中,通常是使用加速度計和陀螺儀對物體的加速度和旋轉角進行測量。
?
剛體三維空間運動分解 AHRS(Attitude Heading Reference System)全稱航向姿態參考系統,是利用加速度傳感器、陀螺儀以及電子羅盤對實際目標各運動參數和方位進行測量,通過對測量值加以處理和計算以對目標的位置和運動狀態進行實時跟蹤監控。 IMU(Inertial Measurement Unit)也稱慣性測量單元是利用加速度傳感器和陀螺儀對目標系統加速度和旋轉角速度進行測量,以得到目標在慣性參考系下的運動和狀態的裝置。 參考系統區別 從二者的定義上不難看出,AHRS進行測量時所選擇的參考系是地球自身,其測量對象的位置也是具體的地理位置。而IMU慣性測量單元則不同,其測量的是相對特定慣性參考系下的位置和運動狀態,該參考系可以是房屋、建筑等固定點或者勻速運動的系統。從概念上來說,慣性測量單元應用范圍更加廣泛,因為AHRS的參考點地球也是一個慣性參考系(并不絕對,僅限地球范圍。在太陽系內以太陽作為慣性參考系)
AHRS與IMU
AHRS(AttitudeHeadingReferenceSystem)全稱航向姿態參考系統,是利用加速度傳感器、陀螺儀以及電子羅盤對實際目標各運動參數和方位進行測量,通過對測量值加以處理和計算以對目標的位置和運動狀態進行實時跟蹤監控。
IMU(InertialMeasurementUnit)也稱慣性測量單元是利用加速度傳感器和陀螺儀對目標系統加速度和旋轉角速度進行測量,以得到目標在慣性參考系下的運動和狀態的裝置。
參考系統區別
從二者的定義上不難看出,AHRS進行測量時所選擇的參考系是地球自身,其測量對象的位置也是具體的地理位置。而IMU慣性測量單元則不同,其測量的是相對特定慣性參考系下的位置和運動狀態,該參考系可以是房屋、建筑等固定點或者勻速運動的系統。從概念上來說,慣性測量單元應用范圍更加廣泛,因為AHRS的參考點地球也是一個慣性參考系(并不絕對,僅限地球范圍。在太陽系內以太陽作為慣性參考系)。
?
9軸姿態檢測模塊PNI SENtral M&M
系統組成區別
盡管AHRS和IMU的測量元件基本上相同,但由于AHRS的參考系統不同,AHRS相比IMU要多出個電子羅盤。在AHRS進行運動軌跡和狀態監測時,由于陀螺儀時漂的問題,在對運動過程中的旋轉角度進行積分時,會隨著時間推移而誤差越來越大,因此,需要電子羅盤及時對運動的地理方位角度進行校準。
測量準確性
由于AHRS選擇地球作為參考系,并通過電子羅盤測量電磁場進行位置的校準,相比而言,不包含電子羅盤的慣性測量單元精度往往要更高。通過電子羅盤對地理方位角進行校準,固然可以在一定程度上提高準確性,然而羅盤自身誤差以及測量時漂和復雜磁場等因素的存在,同樣會導致測量的準確性下降。此外由于IMU參考系統的不確定性,通常其采用精確度和穩定性更好的陀螺儀,以保證旋轉角測量的準確性,當然相比而言,一般IMU的成本更高。

?

?
AHRS通常用在航空飛行測量、地面機動車輛遙控、無人飛行器跟蹤等領域中
應用范圍
由于AHRS對參照系的選擇,使得其應用領域不如IMU應用廣泛。AHRS通常可利用電子羅盤等傳感器,用在航空飛行測量、地面機動車輛遙控、無人飛行器跟蹤等領域中。由于IMU的參考系靈活變動性,慣性測量通常可用于室內軌跡推算、盲區導航、體感游戲、航天測算以及軍事慣性制導等方面。
?研發銷售6軸、9軸電子羅盤(陀螺儀|加速計|磁力計)、傾角傳感器、姿態傳感器,慣導、數據采集盒、IoT遠程智慧監測等
產品廣泛應用于:無人機、無人船、巡檢/引導/送餐/水下機器人、AGV、云臺裝置、望遠鏡、Qiang支瞄準鏡、雷達定位、聚光太陽能、工礦/隧道無人設備等!
核心研發人員十年技術積累,專業研發團隊,軍工級品質,替代進口。
-
陀螺儀
+關注
關注
44文章
889瀏覽量
101616 -
電子羅盤
+關注
關注
1文章
124瀏覽量
24190 -
IMU
+關注
關注
6文章
416瀏覽量
47872 -
AHRS
+關注
關注
0文章
24瀏覽量
14353 -
姿態解算
+關注
關注
0文章
50瀏覽量
8640
發布評論請先 登錄

Xsens/Movella的新款Avior慣性測量單元

Bosch Sensortec慣性測量單元BMI570產品介紹

測繪級MEMS組合導航系統精度對標分析
陀螺儀在慣性導航、飛行控制、姿態控制等領域應用
MEMS慣性器件主要技術指標

如何讓設備姿態測量更精準?這款超小MEMS陀螺儀來幫你!

這款MEMS組合導航系統如何做到60秒高精度導航?


愛普生M-G370PDS慣性測量單元在無人機導航中的應用

組合導航系統中的慣性導航系統是什么?
Bosch Sensortec最新推出BMI330慣性測量單元
愛普生M-G366PDG慣性測量單元IMU成為動中通天線系統的理想選擇


愛普生慣性測量單元M-G370PDF可廣泛用于各工業領域




 工商網監
工商網監
評論