 IMU系統簡介
IMU系統簡介

- IMU原理
慣性測量單元(IMU)通常指由3個加速度計和3個陀螺儀組成的組合單元,加速度計和陀螺儀安裝在互相垂直的測量軸上。低精度的IMU可以通過其他方式修正,GPS用于修正位置的長期漂移,氣壓計用于修正高度,磁力計用于修正姿態。
傳感器直接固聯在載體上稱為捷聯慣導系統。
MEMS陀螺儀原理
加速度計原理
MPU6050
MPU-60x0是全球首例9軸運動處理傳感器。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計,以及一個可擴展的數字運動處理器DMP(Digital Motion Processor),可用I2C接口連接一個第三方的數字傳感器,比如磁力計。擴展之后就可以通過其I2C或SPI接口輸出一個9軸的信號(SPI接口僅在MPU-6000可用)。MPU-60x0也可以通過其I2C接口連接非慣性的數字傳感器,比如壓力傳感器。

MPU-60x0對陀螺儀和加速度計分別用了三個16位的ADC,將其測量的模擬量轉化為可輸出的數字量。為了精確跟蹤快速和慢速的運動,傳感器的測量范圍都是用戶可控的,陀螺儀可測范圍為±250,±500,±1000,±2000°/秒(dps),加速度計可測范圍為±2,±4,±8,±16g。一個片上1024字節的FIFO,有助于降低系統功耗。和所有設備寄存器之間的通信采用400kHz的I2C接口或1MHz 的SPI接口(SPI僅MPU-6000可用)。對于需要高速傳輸的應用,對寄存器的讀取和中斷可用20MHz的SPI。另外,片上還內嵌了一個溫度傳感器和在工作環境下僅有±1%變動的振蕩器。
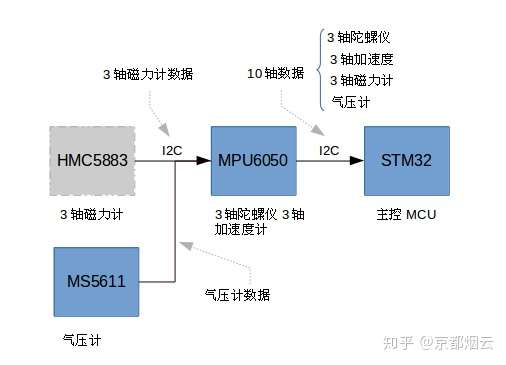
在crazepony上,MPU6050/HMC5883/MS5611傳感器之間的連接如下圖所示。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
IMU
+關注
關注
6文章
414瀏覽量
47816
發布評論請先 登錄
相關推薦
熱點推薦
IMU應用領域及技術前景探討
慣性測量單元(IMU)長久以來被視為航空航天和高端導航領域的核心技術。然而,隨著微機電系統(MEMS)技術的成熟,高性能、低成本、小型化的IMU已徹底突破傳統疆界,成為工業4.0時代不可或缺
導遠科技IMU模組加速無人叉車的落地應用
近期,導遠科技與中國電動叉車領域的龍頭企業展開合作,為其多款自動駕駛叉車提供高精度慣性測量單元(IMU)模組,進一步強化車輛的空間定位能力。此次合作中,IMU被安裝在激光雷達正下方,通過不依賴外部環境的高頻、連續的自主慣性數據輸出,為設備的定位
求助!IMU選剛性還是柔性?復雜場景快愁哭了
#IMU選型 #工程監測 做老舊隧道監測的來求助!之前用剛性IMU,隧道里有震動就容易飄數據,換了兩臺都沒解決,老板快把我罵哭了?
聽朋友說全柔性IMU靠譜,說能像創可貼一樣貼在隧道壁上,抗震動抗
發表于 11-25 17:02
IMU+多相機高速聯合自動標定方案
隨著視覺慣性傳感器在自動駕駛、機器人、AR/VR 等領域規模化落地,多相機+IMU 聯合標定需求呈爆發式增長,多相機+IMU 聯合標定領域尚屬空白。
感算商城聯合知名方案公司推出國內首臺量產級
發表于 10-23 14:04
IMU的精度對無人機姿態控制意味著什么?
IMU的精度對無人機姿態控制至關重要,是決定無人機飛行穩定安全、響應性和任務執行能力的關鍵因素之一, IMU(包含三軸加速度計和三軸陀螺儀)是飛控系統實時估算無人機姿態(俯仰、橫滾、偏航角)的核心
為什么IMU是無人機穩定控制的的核心?
在無人機從消費級向工業級/行業級跨越的過程中,"精準" 與 "穩定" 成為核心競爭力,這依賴于底層慣性測量技術的突破。IMU是無人機穩定控制的核心,它直接
使用高精度IMU對無人機系統有何提升?
在無人機自主飛行的核心技術鏈條中,慣性測量單元(IMU)的精度與可靠性直接決定了整機的控制上限。高精度IMU對無人機系統的提升是全方位的,尤其在導航精度、穩定性、自主性和可靠性等關鍵性能方面。它通常是實現專業級和工業級無人機應用
IMU 能為無人機提供什么數據?
無人機在進行任何形式的飛行時,必須了解空中平臺的方向、其運動的性質以及飛行方向。
通常用于測量此運動的是IMU,IMU提供無人機在橫滾、俯仰和偏航方面的加速度和角速度數據。常見應用包括控制和穩定、測量和測試。
尋北級別精度的MEMS IMU
由地球磁場決定,位置不固定。
ER-MIMU-041是精度達到尋北級別的MEMS IMU,代表了微型化與高精度尋北的突破性結合,在GPS或磁力計不可用的場景中尤為實用,例如在地下環境或存在磁干擾的區域。尤其適用于地下鉆探設備與礦山開采系統的定向與姿態控制。
為什么高端無人機不會在IMU精度上妥協?
姿態控制精度與系統集成度現已成為制約無人機性能提升的關鍵瓶頸。無人機通過IMU集成的陀螺儀與加速度計,實現對三維空間姿態(角速度、加速度)數據的實時測量,數據傳遞至飛控系統,能得到無人機的姿態、速度、位移等信息,無人機穩定飛行的
適用于無人機的 IMU 有哪些要求?
慣性測量單元(IMU)作為無人機飛行時運動感知的核心部件,它通過整合陀螺儀、加速度計,有時還包括磁力計、氣壓計等多種傳感器的數據,全面掌握無人機的運動狀態。這些信息對于飛行控制、姿態穩定和導航至關重要。
因此,選擇一個適合無人機的IMU是非常重要的,其性能直接影響無人機

這款微型MEMS IMU如何做到戰術級測量?
在無人機、機器人、無人車輛等智能設備快速發展的今天,高精度姿態測量和穩定控制成為核心需求。然而,傳統慣性測量單元(IMU)往往面臨體積大、重量重、環境適應性差等痛點。ERICCO
求助,關于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
傳感器IMU是LSM6DSL型號,磁強計是LIS3MDL型號,使用motionfx庫進行姿態解算,遇到航向角不準確的問題。我查看地磁計的值是正常的,但是航向角不正常:例如傳感器指向正北,地磁計X軸
發表于 06-10 07:19
九軸 IMU:賦能無人機,開啟智能飛行新紀元
軸IMU ER-MIMU-063]為例,它具有三軸陀螺,三軸加速度計和三軸磁力計。它能夠精準捕捉無人機在三維空間內的每一個細微動作與姿態變化,實時提供精確數據。飛控系統可依據IMU 傳來的數據,飛速算出無人機當下的姿態、速度、位
革新無人機導航:如何重新定義IMU高性能低成本
隨著無人機在農業測繪、物流運輸、應急救援等領域的廣泛應用,市場對高精度、高可靠性導航系統的需求激增。每一次精準的姿態調整與運動響應,都離不開IMU。ER-MIMU-08 應運而生——成為無人機導航與控制系統低成本高精度的核心解決



 工商網監
工商網監
評論