 適用于無人機的 IMU 有哪些要求?
適用于無人機的 IMU 有哪些要求?

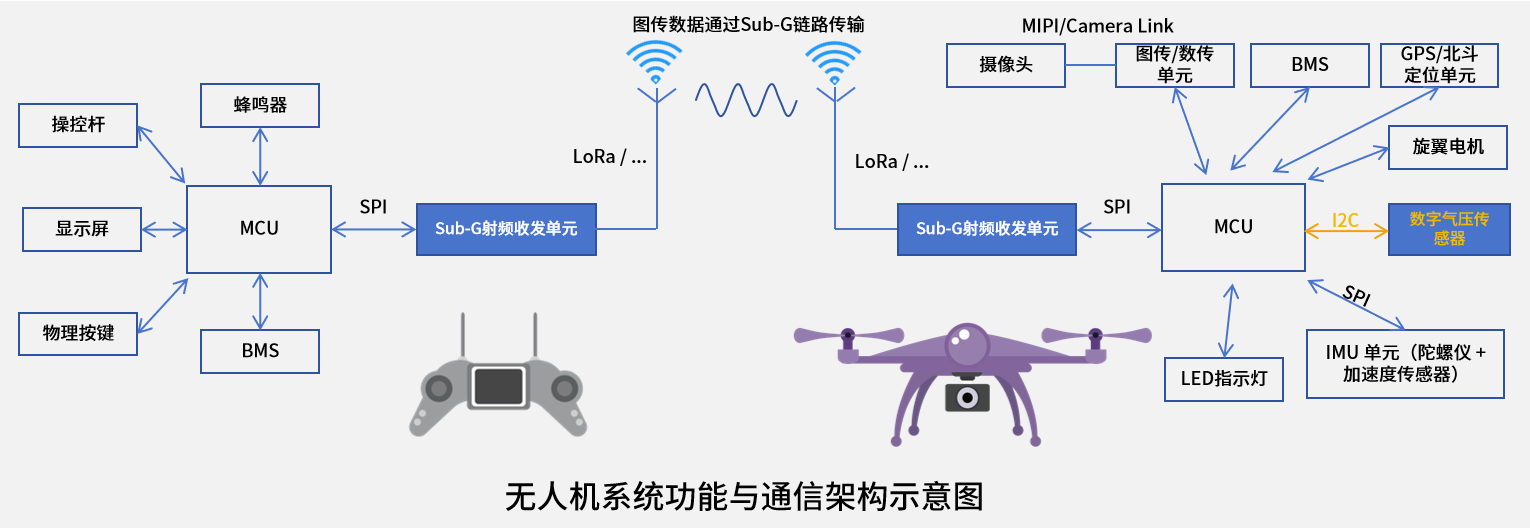
慣性測量單元(IMU)作為無人機飛行時運動感知的核心部件,它通過整合陀螺儀、加速度計,有時還包括磁力計、氣壓計等多種傳感器的數據,全面掌握無人機的運動狀態。這些信息對于飛行控制、姿態穩定和導航至關重要。
因此,選擇一個適合無人機的IMU是非常重要的,其性能直接影響無人機的飛行控制與姿態穩定。
[ER-MIMU-M02 MEMS IMU]集成了陀螺儀、加速度計、磁力計和氣壓計(高度計),能為無人機解算姿態、速度與位置提供完整的數據。在性能優秀的同時成本較低,可進行短周期,大批量,規模化生產,是非常適用于無人機的IMU。
高精度慣性傳感器
陀螺儀:提供±450o/s的測量范圍,零偏不穩定性低至2o/h,角度隨機游走僅0.08o/√h。
加速度計:具備±16g的動態范圍,零偏不穩定性為24μg,速度隨機游走低至0.02m/s/√h。
在-40°C至80°C的寬溫范圍內,通過內置高性能溫度校準和補償算法,能保持性能穩定。
飛行姿態控制:三軸角速率和加速度是飛控算法(如PID控制)的核心輸入,通過計算可獲得無人機姿態、速度、位移等信息,實現飛行器的穩定懸停、敏捷機動和抗風擾。
多傳感器融合增強
三軸磁力計:±2.5 Gauss測量范圍,輔助定向校準,提供磁北方向。
氣壓計:測量范圍450-1100 mbar,分辨率0.1 mbar,主要用于提供高度信息,是實現精確高度保持(定高飛行)和垂直位置估計的關鍵傳感器。
超輕薄設計
采用最新MEMS陀螺技術,將體積壓縮極致,厚度僅有14mm的超薄設計,重量50g,極大節省無人機空間與載荷。
通過 1.5W 低功耗設計和SPI通信接口,平衡了性能與嵌入式系統適配性。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2577文章
55360瀏覽量
793337 -
mems
+關注
關注
129文章
4519瀏覽量
199316 -
IMU
+關注
關注
6文章
425瀏覽量
48066
發布評論請先 登錄
相關推薦
熱點推薦
高性能MEMS IMU:重構無人機飛行控制核心
在無人機的飛行系統中,慣性測量單元(IMU)是決定飛行穩定性、導航精度與環境適應性的 “運動神經中樞”。ER-MIMU-M02 作為一款高性能十軸 MEMS IMU,集成三軸陀螺儀、加速度計、磁力計
Amphenol 4 端口千兆以太網交換機:適用于下一代無人機、機器人和嵌入式應用
Amphenol 4 端口千兆以太網交換機:適用于下一代無人機、機器人和嵌入式應用 在電子工程領域,為下一代無人機、機器人和嵌入式應用開發先進的網絡解決方案至關重要。Amphenol 的這款 4
無人機遠距離數傳圖傳設備技術的挑戰因素
在無人機的遠距離數傳中,選擇合適的設備至關重要。本文將深入探討適用于無人機遠距離數傳的關鍵設備,包括通信模塊、數據鏈路系統等,幫助用戶了解如何優化無人機飛行并拓展應用領域。

ce認證對無人機有要求嗎
是的,歐盟對無人機有嚴格的CE認證要求。根據歐盟法規,自2024年1月1日起,所有在歐盟市場售賣和運行的無人機(特別是“開放”類別)都必須符合(EU)2019/945和(EU)2019

無人機巡檢系統在風電運維中的關鍵技術解析
無人機平臺、傳感設備、自主飛行與避障技術以及數據鏈與處理系統等關鍵技術模塊。 ? ? ? ?智能飛行平臺:靈活作業全方位覆蓋 ? ? ? ?適用于風電巡檢的無人機具備出色的機動性能與垂直起降能力,能夠適應風電場的復雜環境。這類飛
IMU的精度對無人機姿態控制意味著什么?
IMU的精度對無人機姿態控制至關重要,是決定無人機飛行穩定安全、響應性和任務執行能力的關鍵因素之一, IMU(包含三軸加速度計和三軸陀螺儀)是飛控系統實時估算
為什么IMU是無人機穩定控制的的核心?
在無人機從消費級向工業級/行業級跨越的過程中,"精準" 與 "穩定" 成為核心競爭力,這依賴于底層慣性測量技術的突破。IMU是無人機穩定控制的核心,它直接
MEMS IMU如何賦能無人機與機器人精準感知?
無人機懸停時姿態漂移?機器人操控失誤?自動化設備精準定位總差 "臨門一腳"?它們都需要一顆強大的“運動感知心臟”--IMU。
使用高精度IMU對無人機系統有何提升?
在無人機自主飛行的核心技術鏈條中,慣性測量單元(IMU)的精度與可靠性直接決定了整機的控制上限。高精度IMU對無人機系統的提升是全方位的,尤其在導航精度、穩定性、自主性和可靠性等關鍵性
IMU 能為無人機提供什么數據?
無人機在進行任何形式的飛行時,必須了解空中平臺的方向、其運動的性質以及飛行方向。
通常用于測量此運動的是IMU,IMU提供無人機在橫滾、俯
為什么高端無人機不會在IMU精度上妥協?
姿態控制精度與系統集成度現已成為制約無人機性能提升的關鍵瓶頸。無人機通過IMU集成的陀螺儀與加速度計,實現對三維空間姿態(角速度、加速度)數據的實時測量,數據傳遞至飛控系統,能得到無人機
低空物流:無人機開啟未來配送新篇章
,廣泛應用于快遞配送、醫療物資運輸、農產品運輸等領域,尤其在偏遠地區、緊急情況或城市末端配送中優勢顯著。
01重優勢
為什么選擇低空物流?
高效性:無人機配送速度可達40-60公里/小時,較傳統快遞快
發表于 07-04 10:42
九軸 IMU:賦能無人機,開啟智能飛行新紀元
隨著技術提升,無人機領域正經歷著前所未有的變革,而IMU無疑是這場變革中的關鍵力量。作為專業人士,您一定深知前沿技術對行業的重塑意義,今天就帶您深入探尋 IMU 在無人機產業的無限潛力



 工商網監
工商網監
評論