") 基于點(diǎn)云的視覺引導(dǎo)系統(tǒng)
基于點(diǎn)云的視覺引導(dǎo)系統(tǒng)

一、項(xiàng)目介紹
1.項(xiàng)目概述
功能目標(biāo)是基于點(diǎn)云的軌跡引導(dǎo),即無論待引導(dǎo)物體以何種位姿擺放(要求該位姿在機(jī)械臂的行程范圍內(nèi)),視覺系統(tǒng)均能定位到該物體,并引導(dǎo)機(jī)械臂按需要的軌跡實(shí)現(xiàn)一定的工藝流程(比如鞋底涂膠等)。
應(yīng)用場景是鞋底涂膠等需要軌跡引導(dǎo)的工業(yè)現(xiàn)場。經(jīng)過四十多年的改革開放,我國制鞋產(chǎn)業(yè)迅猛發(fā)展,但大而不強(qiáng),主要依靠大量廉價勞動力維持生產(chǎn)。而鞋底涂膠作為制鞋的重要工序,目前主要依靠工人手工生產(chǎn)或半自動設(shè)備生產(chǎn),噴涂質(zhì)量良莠不齊,生產(chǎn)效率低,并且粘膠劑揮發(fā)出的毒性氣體對操作工人的身體健康有著嚴(yán)重的威脅。采用機(jī)器替代人工實(shí)現(xiàn)自動化噴膠不僅能有效避免上述問題的產(chǎn)生,而且能夠有效地控制膠膜厚度和噴涂面積,能夠保證膠膜的均勻性和厚度的一致性,提高膠粘質(zhì)量。基于示教或離線編程方式控制的執(zhí)行機(jī)構(gòu),一旦工作環(huán)境或目標(biāo)對象發(fā)生變化,機(jī)器人不能及時適應(yīng)這些變化,從而導(dǎo)致噴膠作業(yè)失敗。目前,以機(jī)器視覺為核心的引導(dǎo)加工技術(shù)正在逐步成為現(xiàn)代工業(yè)生產(chǎn)中的關(guān)鍵技術(shù)。相較于二維機(jī)器視覺引導(dǎo)技術(shù),三維機(jī)器視覺技術(shù)不僅能夠獲取物體表面的深度等形貌信息,而且能夠在實(shí)現(xiàn)對物體識別定位的同時根據(jù)物體姿態(tài)實(shí)時調(diào)整運(yùn)動方式。在工業(yè)生產(chǎn)測量環(huán)境中,采用面結(jié)構(gòu)光掃描的三維視覺測量技術(shù)以其抗干擾性強(qiáng)、精度較高等一系列優(yōu)勢,得到了越來越廣泛的應(yīng)用。在鞋制品生產(chǎn)過程中,采用面結(jié)構(gòu)光掃描方式的三維視覺引導(dǎo)技術(shù)能夠?qū)崟r感知鞋模產(chǎn)品,實(shí)現(xiàn)對任意款式鞋子噴膠的需求,能夠適應(yīng)未來個性化制鞋發(fā)展的需要。
2.系統(tǒng)構(gòu)成
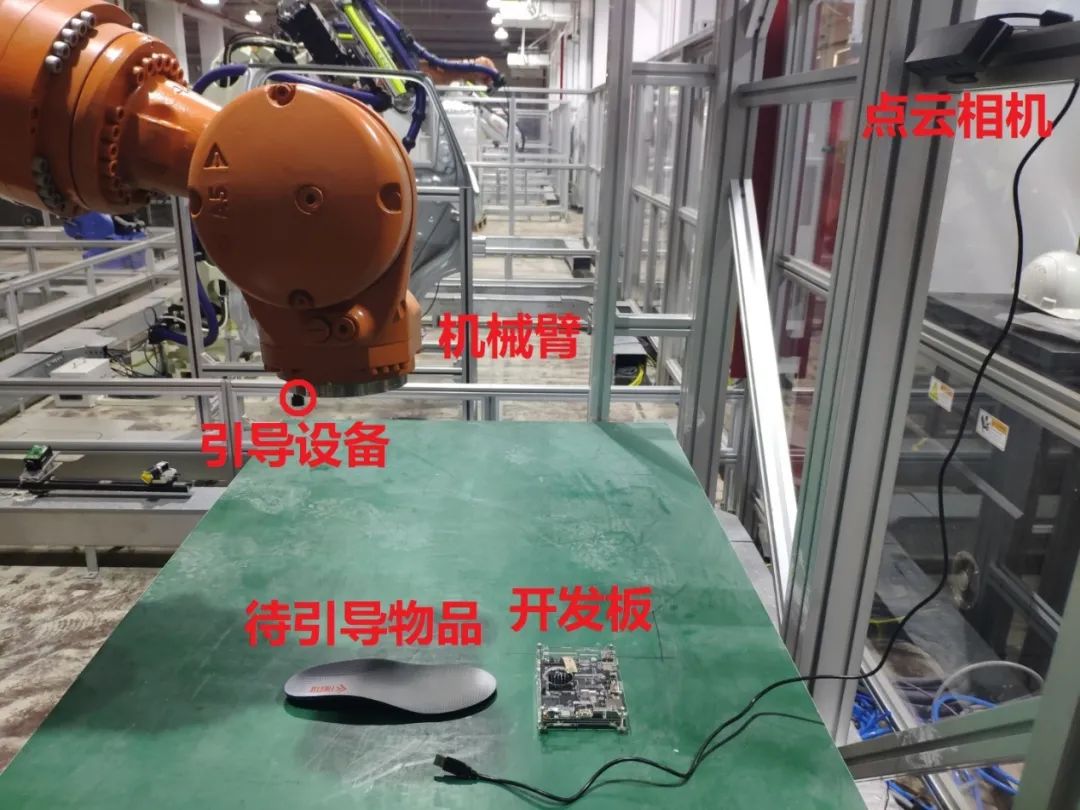
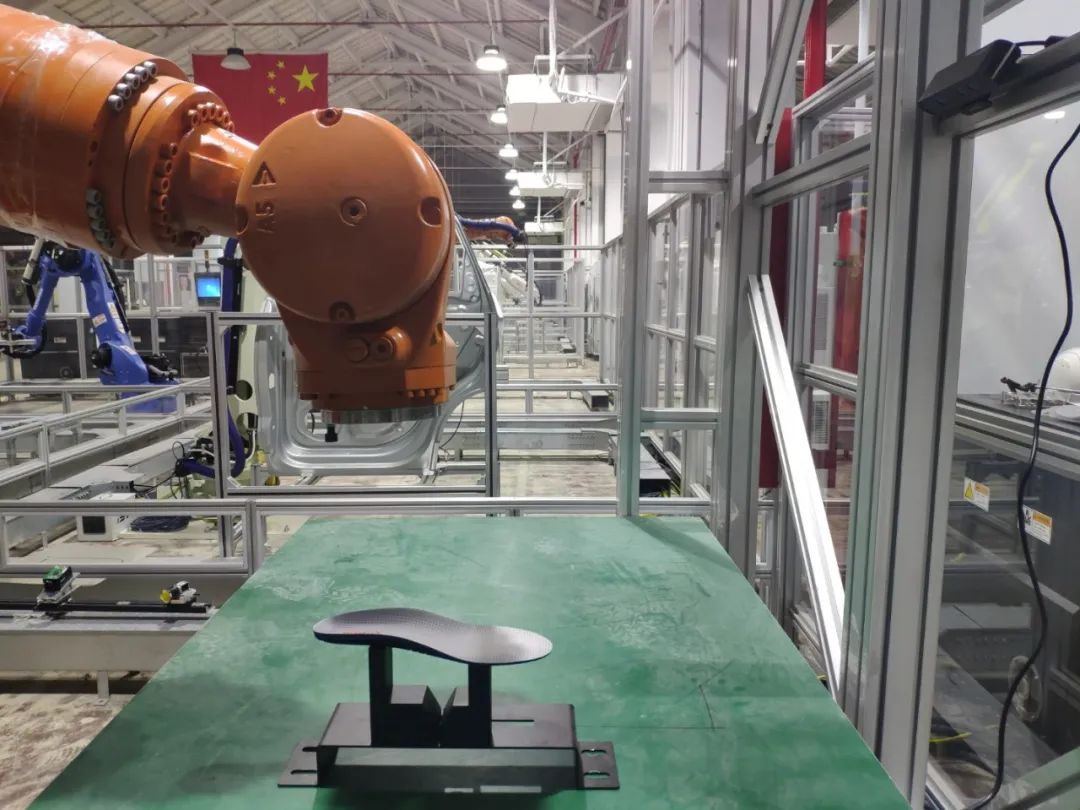
系統(tǒng)構(gòu)成及實(shí)物圖如下:
序號構(gòu)成選型備注
1點(diǎn)云相機(jī)奧比中光的Astra Pro深度相機(jī)
2開發(fā)板奧比中光的Zora P1開發(fā)板也可使用普通的PC
3機(jī)械臂KUKA KR 210 R2700 extra也可使用其他六軸工業(yè)機(jī)器人
4引導(dǎo)設(shè)備M8螺栓條件有限,用螺栓代替膠槍
5待引導(dǎo)物品鞋墊
3.產(chǎn)品化
本項(xiàng)目實(shí)際引導(dǎo)精度在5mm左右,完全能滿足工業(yè)現(xiàn)場下cm級的引導(dǎo)需求。
如果需要產(chǎn)品化,還需要做的工作是做開發(fā)板與機(jī)械臂之間的通訊。本項(xiàng)目使用的是kuka機(jī)械臂,由于條件受限,沒有實(shí)現(xiàn)通訊。如果是類似UR機(jī)械臂等原生支持TCP通訊的,只要寫個簡單的socket程序即可,并不需要額外的硬件。
4.未來市場潛力
近些年來,隨著機(jī)器視覺和工業(yè)機(jī)器人得到越來越廣泛的使用,機(jī)器換人的趨勢日趨明顯。工業(yè)機(jī)器人可以準(zhǔn)確高效地完成重復(fù)性的工作,但缺乏柔性,故需要添加機(jī)器視覺系統(tǒng)加以輔助。而2D圖像缺乏深度信息,常常難以滿足六自由度的引導(dǎo)要求,故需要3D點(diǎn)云作為數(shù)據(jù)來源。
本項(xiàng)目《基于點(diǎn)云的視覺引導(dǎo)系統(tǒng)》,就是基于奧比中光的Astra Pro深度相機(jī)和Zora P1開發(fā)板,實(shí)現(xiàn)基于點(diǎn)云的軌跡引導(dǎo)。軌跡引導(dǎo)已廣泛應(yīng)用于汽車玻璃涂膠、鞋底涂膠等各個領(lǐng)域,未來市場潛力巨大。
此外,基于本項(xiàng)目使用引導(dǎo)方法的擴(kuò)展,也可實(shí)現(xiàn)零件抓取、零件裝配等更多的引導(dǎo)需求,本項(xiàng)目只是受限于手頭的條件(沒有與機(jī)械臂匹配的夾爪),沒有進(jìn)行相關(guān)的嘗試,但原理層面是共通的。
二、關(guān)鍵技術(shù)創(chuàng)新點(diǎn)
本項(xiàng)目的難點(diǎn)與創(chuàng)新點(diǎn)主要在于,怎么在各方面條件受限的情況下,盡量提升最后的引導(dǎo)精度。
條件受限包括:
●Astra Pro深度相機(jī)由于MX400芯片的原因,無法導(dǎo)出相機(jī)參數(shù),即無法得到出廠時的準(zhǔn)確內(nèi)參及外參。
● 手頭沒有高精度的標(biāo)定板、沒有紅外光源,難以重新標(biāo)定Astra Pro深度相機(jī)。
● Astra Pro深度相機(jī)的點(diǎn)云精度(3mm @ 1m)遠(yuǎn)沒有工業(yè)級點(diǎn)云相機(jī)(0.2mm @ 1m)高。
主要技術(shù)創(chuàng)新點(diǎn)如下:
1.相機(jī)標(biāo)定
相機(jī)標(biāo)定是視覺系統(tǒng)的基礎(chǔ),工業(yè)級的相機(jī)標(biāo)定需要碳纖維(或者玻璃等)的工業(yè)級標(biāo)定板,保證平整度和角點(diǎn)精度。同時需要遮住激光器,并使用紅外光源,使得紅外相機(jī)能采集到清晰的標(biāo)定板圖像。
但是,普通開發(fā)者通常不具備上述條件,面臨的情況常常是沒有標(biāo)定板和紅外光源。為此,本項(xiàng)目使用自制標(biāo)定板,即通過代碼生成高分辨率的棋盤格圖像,并用打印機(jī)將其打印出來,貼在平板上。但是由于沒有紅外光源,紅外相機(jī)只能借助帶激光散斑的激光器的光源來拍攝標(biāo)定板圖像,帶來的問題是部分角點(diǎn)檢測的誤差較大。
為了解決這個問題,本項(xiàng)目采用先執(zhí)行一次相機(jī)標(biāo)定,保留重投影誤差小的70%的點(diǎn),再執(zhí)行一次相機(jī)標(biāo)定。這么做可以明顯降低重投影誤差、提高精度,使用此方法標(biāo)定出的相機(jī)內(nèi)外參通過深度圖和彩色圖的對齊來驗(yàn)證,確實(shí)取得了良好的效果。
2.手眼標(biāo)定
對于眼在手外的情況,即相機(jī)固定在機(jī)械臂外部,不隨機(jī)械臂運(yùn)動,工業(yè)場景下的常用手眼標(biāo)定方法是把標(biāo)定板固定在機(jī)械臂末端,機(jī)械臂帶著標(biāo)定板運(yùn)動多個姿態(tài),固定在機(jī)械臂外某處的相機(jī)拍攝每個姿態(tài)下標(biāo)定板的圖像,并記錄機(jī)械臂末端位姿。可以建立閉環(huán)運(yùn)動鏈方程,求解的方程AX=XB,A與相機(jī)相關(guān),B與機(jī)械臂相關(guān),X為手眼矩陣,表示相機(jī)坐標(biāo)系到機(jī)械臂基坐標(biāo)系的變換關(guān)系。
但是,由于缺乏紅外光源和高精度標(biāo)定板,無法從帶激光散斑的紅外圖像中準(zhǔn)確提取標(biāo)定板角點(diǎn),上述常用的手眼標(biāo)定方法難以實(shí)施,故本項(xiàng)目采取一種更為直接的手眼標(biāo)定方法。具體做法是:
● 找到一個有4個頂點(diǎn)的物體(如包裝盒),用深度相機(jī)掃描該物體獲得點(diǎn)云,獲取4個頂點(diǎn)在點(diǎn)云相機(jī)坐標(biāo)系下的坐標(biāo);
● 把機(jī)械臂的TCP(Tool Center Point,工具中心點(diǎn))做到引導(dǎo)設(shè)備末端,用引導(dǎo)設(shè)備末端去觸碰那4個頂點(diǎn),獲取4個頂點(diǎn)在機(jī)械臂基座坐標(biāo)系下的坐標(biāo);
● 通過4個頂點(diǎn)在點(diǎn)云相機(jī)坐標(biāo)系下的坐標(biāo)、機(jī)械臂基座坐標(biāo)系下的坐標(biāo),求解出點(diǎn)云相機(jī)坐標(biāo)系到機(jī)械臂基坐標(biāo)系的變換關(guān)系,完成手眼標(biāo)定。
3.引導(dǎo)思路
本項(xiàng)目實(shí)現(xiàn)的是基于點(diǎn)云的軌跡引導(dǎo),可以拆解為兩個過程:
● 過程一是定位,即視覺系統(tǒng)定位到待引導(dǎo)物體;
● 過程二是引導(dǎo),即視覺系統(tǒng)引導(dǎo)機(jī)械臂按需要的軌跡實(shí)現(xiàn)一定的工藝流程。
考慮到Astra Pro深度相機(jī)的點(diǎn)云精度遠(yuǎn)沒有工業(yè)級點(diǎn)云相機(jī)高,為了盡量減小點(diǎn)云精度對最終引導(dǎo)精度的影響,故本項(xiàng)目使用相對測量的思想,將過程一的定位問題轉(zhuǎn)化為點(diǎn)云匹配問題,將過程二的引導(dǎo)問題轉(zhuǎn)化為在模板位置的軌跡基礎(chǔ)上做機(jī)械臂基坐標(biāo)系的偏移。
4.點(diǎn)云匹配
常見的點(diǎn)云配準(zhǔn)方法有很多,可以分為粗配準(zhǔn)和精配準(zhǔn)兩類,而精配準(zhǔn)中的ICP配準(zhǔn)結(jié)果準(zhǔn)確,但依賴比較好的初值。
本項(xiàng)目的預(yù)設(shè)前提是待引導(dǎo)物體以任意位姿擺放,直接使用ICP很可能會陷入局部最優(yōu)解,考慮到運(yùn)行速度與實(shí)現(xiàn)難度,故本項(xiàng)目使用FPFH+RANSAC+ICP的點(diǎn)云匹配思路,即使用FPFH+RANSAC作為粗配準(zhǔn),獲取兩個點(diǎn)云之間的粗略變換關(guān)系,再以此作為初值,使用ICP作為精配準(zhǔn),獲取兩個點(diǎn)云之間的精確變換關(guān)系。
三、實(shí)施過程
1.機(jī)器人做TCP
六軸工業(yè)機(jī)器人的TCP(Tool Center Point,工具中心點(diǎn))默認(rèn)在第六軸法蘭末端,需要先將其修改到引導(dǎo)設(shè)備的末端,即修改到螺栓的末端,如下圖:

做TCP常用的方法是4點(diǎn)法,即讓TCP以4個姿態(tài)去接近同一個點(diǎn),從而解算出TCP與第六軸末端的轉(zhuǎn)換關(guān)系。
2.手眼標(biāo)定
固定好深度相機(jī),使其在整個實(shí)驗(yàn)過程中不要移動。
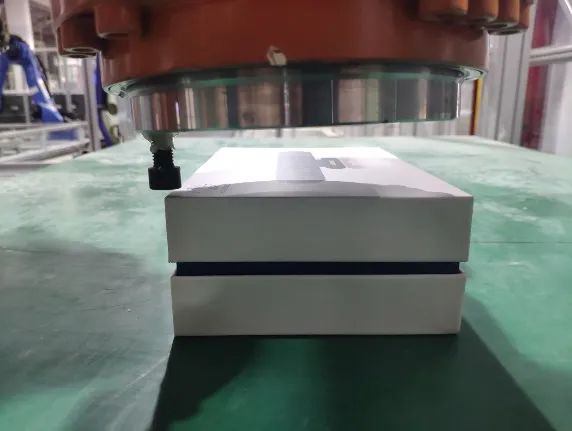
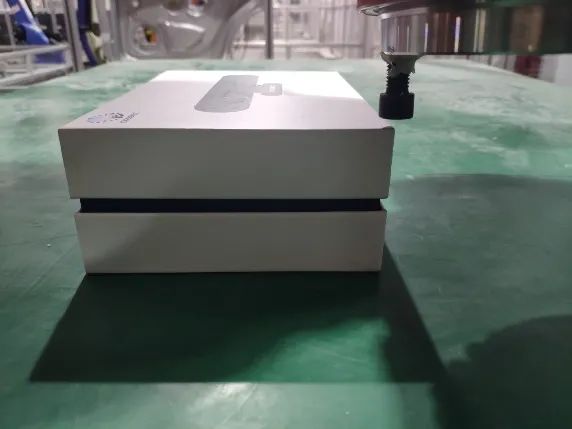
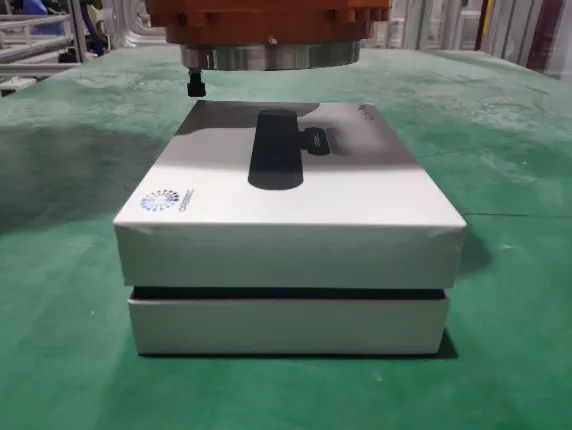
準(zhǔn)備一個有4個明顯頂點(diǎn)且便于深度相機(jī)獲取點(diǎn)云的物品,如奧比中光深度相機(jī)的包裝盒。將當(dāng)前的工具坐標(biāo)系切換為剛剛做完TCP保存的坐標(biāo)系,此時機(jī)器人示教器上的位姿為螺栓末端的位姿。
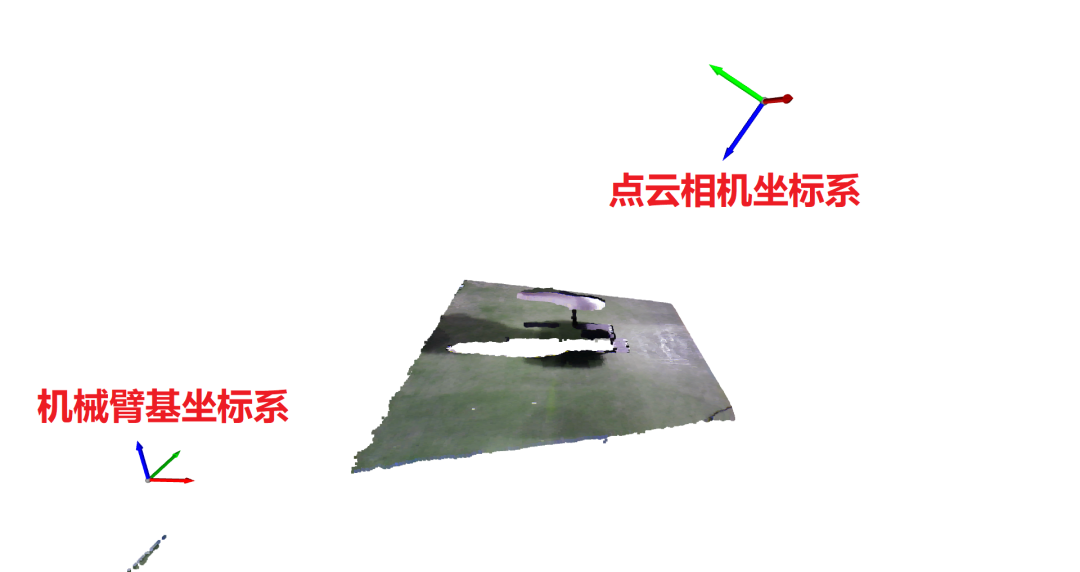
控制機(jī)械臂末端的螺栓分別靠近物品的4個頂點(diǎn),并記錄當(dāng)前的位姿,再用深度相機(jī)獲取物品的點(diǎn)云,記錄4個頂點(diǎn)的坐標(biāo),如下圖:

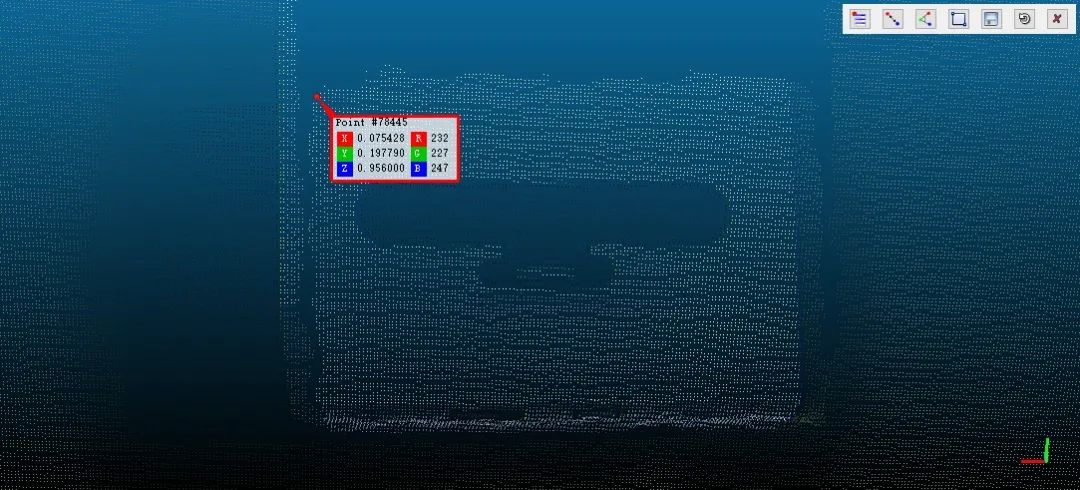
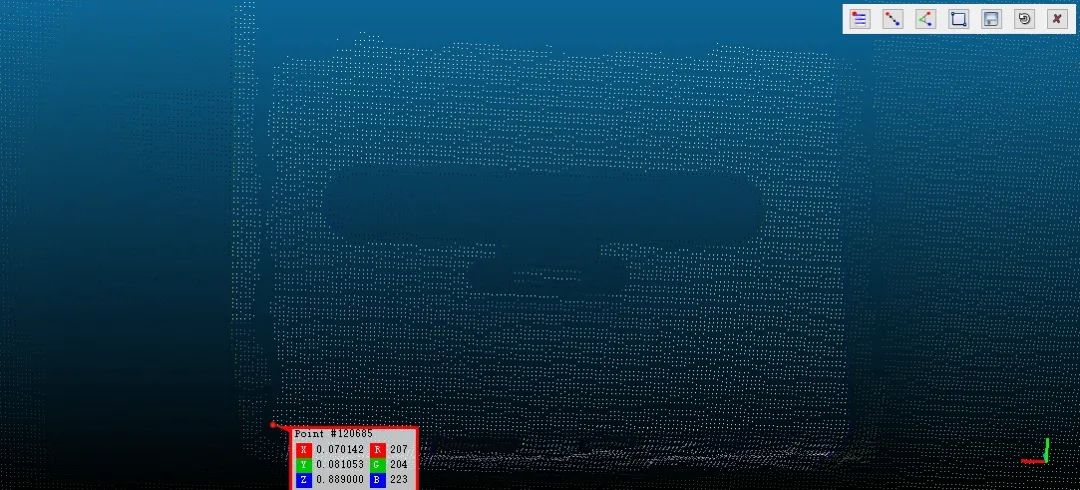
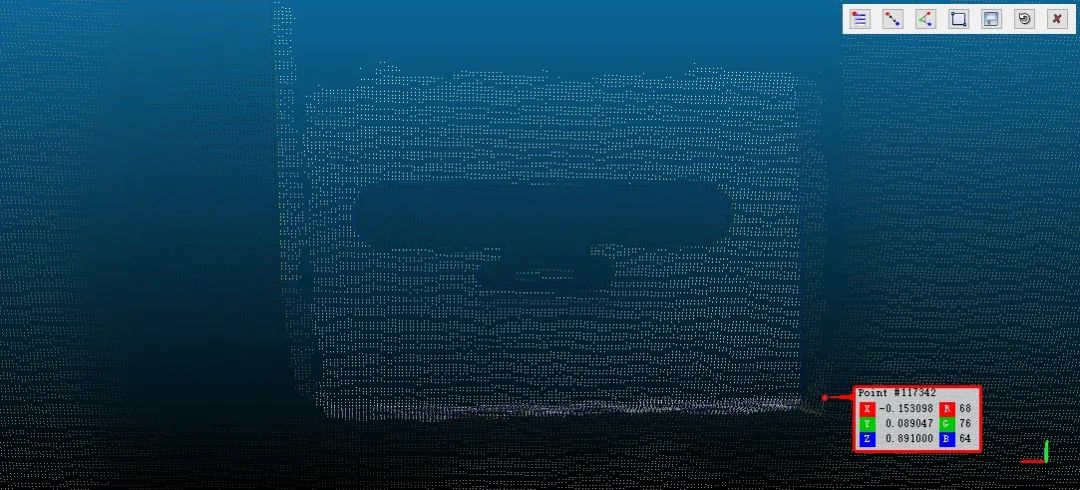
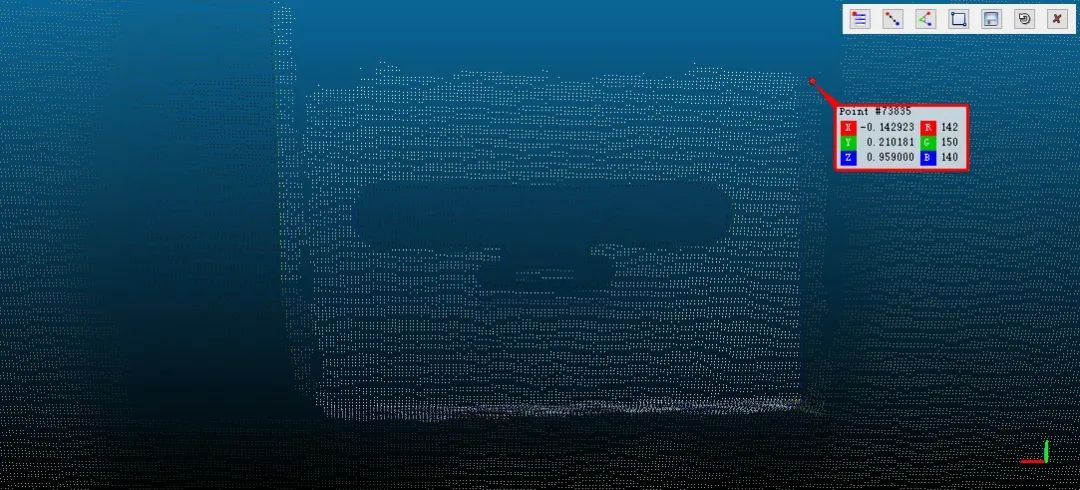
通過4個頂點(diǎn)在點(diǎn)云相機(jī)坐標(biāo)系下的坐標(biāo)、機(jī)械臂基座坐標(biāo)系下的坐標(biāo),求解出點(diǎn)云相機(jī)坐標(biāo)系到機(jī)械臂基坐標(biāo)系的變換關(guān)系。值得注意的是,需要將坐標(biāo)統(tǒng)一到mm單位下。
3.點(diǎn)云匹配 & 實(shí)施引導(dǎo)
準(zhǔn)備一個待引導(dǎo)物品,即鞋墊。
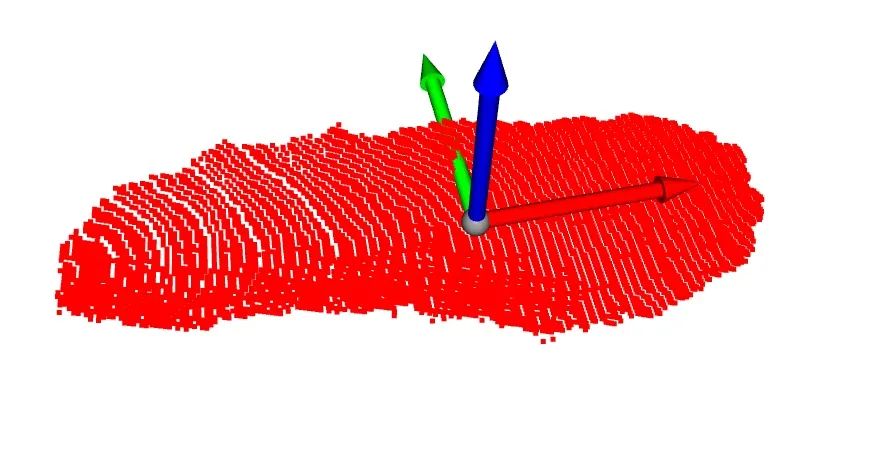
采集一幅點(diǎn)云,根據(jù)點(diǎn)云的原點(diǎn)和手眼關(guān)系,做可視化,如下圖,從直觀上驗(yàn)證手眼關(guān)系是否正確。
實(shí)施步驟如下:
1.掃描零位的鞋墊,濾除無關(guān)的點(diǎn)云,作為模板點(diǎn)云。(下圖紅色)
2.把當(dāng)前基坐標(biāo)系的值全部賦0。
3.在零位制作模板軌跡。
4.改變鞋墊的位姿,重新獲取當(dāng)前的鞋墊點(diǎn)云。(下圖黑色)
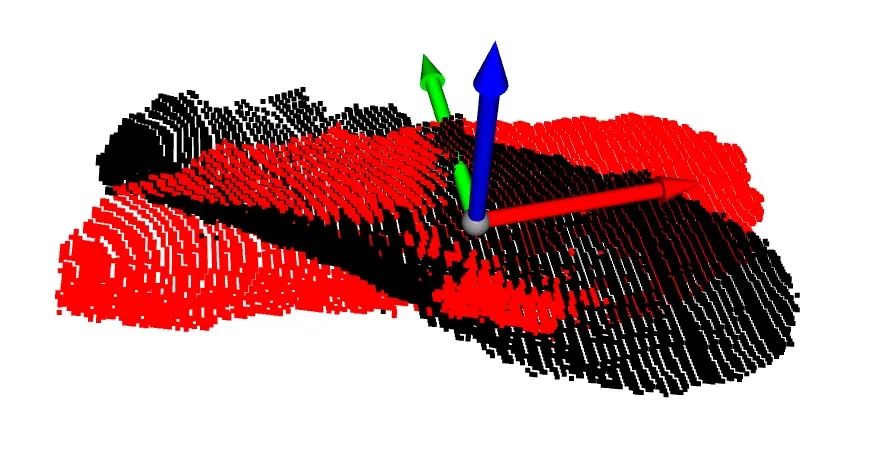
5.執(zhí)行點(diǎn)云匹配,計(jì)算返回給機(jī)械臂基坐標(biāo)系的偏移量,手動通過示教器賦值給當(dāng)前基坐標(biāo)系。
6.機(jī)器人執(zhí)行修正后的軌跡,完成軌跡引導(dǎo)
-
相機(jī)
+關(guān)注
關(guān)注
5文章
1578瀏覽量
55795 -
引導(dǎo)系統(tǒng)
+關(guān)注
關(guān)注
0文章
12瀏覽量
3128 -
點(diǎn)云
+關(guān)注
關(guān)注
0文章
59瀏覽量
4076
原文標(biāo)題:基于點(diǎn)云的視覺引導(dǎo)系統(tǒng)
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
3D視覺引導(dǎo)拆碼垛:一文讀懂“機(jī)器眼”如何指揮機(jī)器人搬貨?

基于3D視覺引導(dǎo)的移動式復(fù)合機(jī)器人設(shè)計(jì):智能自動化革命的核心技術(shù)

機(jī)器視覺網(wǎng)卡與普通網(wǎng)卡的5點(diǎn)關(guān)鍵不同

自動駕駛模型是如何“看”懂點(diǎn)云信息的?

關(guān)于系統(tǒng)啟動引導(dǎo)程序(startup_hbirdv2.S)
明治案例 | 汽車天窗全自動視覺檢測系統(tǒng),螺絲、膠點(diǎn)全覆蓋
視覺定位引導(dǎo)劈刀修磨系統(tǒng)賦能芯片封裝

GraniStudio:視覺和運(yùn)控例程

視覺定位引導(dǎo):芯片制造中的“精準(zhǔn)之眼”

3D視覺引導(dǎo)技術(shù):開啟工業(yè)自動化“慧眼時代”的變革引擎
明晚開播 |數(shù)據(jù)智能系列講座第7期:面向高泛化能力的視覺感知系統(tǒng)空間建模與微調(diào)學(xué)習(xí)

VirtualLab:激光引導(dǎo)無焦系統(tǒng)的分析與設(shè)計(jì)
自動駕駛中常提的“點(diǎn)云”是個啥?

機(jī)器視覺運(yùn)動控制一體機(jī)在視覺點(diǎn)膠滴藥機(jī)上的應(yīng)用
一種基于點(diǎn)、線和消失點(diǎn)特征的單目SLAM系統(tǒng)設(shè)計(jì)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論