") 3D視覺引導(dǎo)拆碼垛:一文讀懂“機(jī)器眼”如何指揮機(jī)器人搬貨?
3D視覺引導(dǎo)拆碼垛:一文讀懂“機(jī)器眼”如何指揮機(jī)器人搬貨?

在物流倉庫或現(xiàn)代化工廠,你常會(huì)看到這樣的場(chǎng)景:機(jī)械臂精準(zhǔn)地伸向堆疊如山的紙箱、料箱,甚至軟包,輕松抓取并放到傳送帶上,整個(gè)過程行云流水,無需人工干預(yù)。讓機(jī)器人從“盲人摸象”到“火眼金睛”的秘訣,就是3D視覺引導(dǎo)技術(shù)。
很多入門者會(huì)好奇,這雙“眼睛”究竟如何看清貨物、精準(zhǔn)定位,又能無縫指揮機(jī)器人完成動(dòng)作?本文將拆解3D視覺“掃描識(shí)別-坐標(biāo)定位-機(jī)器人聯(lián)動(dòng)”的完整流程,講透點(diǎn)云數(shù)據(jù)采集、貨物輪廓提取與姿態(tài)判斷的核心邏輯,結(jié)合紙箱、托盤、料箱等常見物料的特性,幫大家輕松理解3D視覺拆碼垛的底層原理。
一、先搞懂核心:“機(jī)器眼”到底在做什么?
簡(jiǎn)單來說,3D視覺系統(tǒng)的核心作用,就是幫機(jī)器人“看清”工作區(qū)域的貨物——包括貨物的位置、形狀、擺放角度,甚至是是否有變形、粘連等情況,再把這些信息轉(zhuǎn)化為機(jī)器人能聽懂的指令,引導(dǎo)機(jī)器人精準(zhǔn)抓取、搬運(yùn)、碼放,全程無需人工干預(yù)。和傳統(tǒng)機(jī)器人按預(yù)設(shè)程序干活不同,3D視覺讓機(jī)器人有了自主判斷的能力,哪怕貨物擺放不規(guī)整、品規(guī)多樣,也能靈活應(yīng)對(duì),這也是它能適配多場(chǎng)景拆碼垛的關(guān)鍵優(yōu)勢(shì),尤其在食品、醫(yī)藥、電商等物料品類復(fù)雜的行業(yè),應(yīng)用格外廣泛。
二、全流程拆解:“機(jī)器眼”指揮機(jī)器人搬貨的3步走
3D視覺引導(dǎo)拆碼垛的核心流程,可簡(jiǎn)化為“掃描識(shí)別-坐標(biāo)定位-機(jī)器人聯(lián)動(dòng)”三步,每一步都有明確的分工,環(huán)環(huán)相扣,確保搬運(yùn)精準(zhǔn)高效。
第一步:掃描識(shí)別——給貨物拍“3D全身照”,收集核心數(shù)據(jù)
這一步就像我們用眼睛觀察物體, 3D相機(jī)會(huì)對(duì)托盤上的貨物進(jìn)行全方位掃描,不過它拍的不是普通的平面照片,而是能呈現(xiàn)貨物立體形態(tài)的“3D數(shù)據(jù)”——也就是行業(yè)里常說的“點(diǎn)云數(shù)據(jù)”。

點(diǎn)云數(shù)據(jù)可以理解為“無數(shù)個(gè)微小的3D坐標(biāo)點(diǎn)”,這些點(diǎn)密密麻麻覆蓋在貨物表面,拼湊出貨物的立體輪廓,就像用無數(shù)個(gè)小積木搭出貨物的樣子。3D相機(jī)的安裝方式主要有兩種:一種是固定在托盤上方,稱為“眼在外”,適合大面積掃描整垛貨物;另一種是安裝在機(jī)器人手臂上,跟著手臂一起移動(dòng),稱為“眼在手”,能靈活調(diào)整拍攝角度,兼顧不同高度貨物的識(shí)別精度,尤其適合電商倉庫中料箱垛高不一的場(chǎng)景。
采集點(diǎn)云數(shù)據(jù)時(shí),3D相機(jī)會(huì)自動(dòng)應(yīng)對(duì)不同物料的特性:比如紙箱表面可能有圖案、褶皺或扎帶,麻袋容易變形、松散,料箱可能壁薄、緊密嵌合,甚至部分物料會(huì)有反光(如金屬材質(zhì)、透明膜包)。針對(duì)這些情況,相機(jī)通過多光譜補(bǔ)光、抗干擾算法等技術(shù),修復(fù)反光區(qū)域的缺失數(shù)據(jù),確保收集到的點(diǎn)云數(shù)據(jù)清晰、完整,為后續(xù)識(shí)別打下基礎(chǔ)。
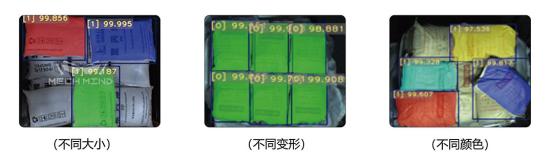
其中軟包的掃描的難度更高,因形態(tài)不固定、垛型雜亂(如六花垛),需要更精準(zhǔn)的點(diǎn)云采集技術(shù),捕捉其變形后的真實(shí)輪廓。值得一提的是,洛微科技的方案在這一環(huán)節(jié)表現(xiàn)突出,不僅能精準(zhǔn)應(yīng)對(duì)六花垛、回形垛等不規(guī)則碼放方式,還具備出色的惡劣工況適應(yīng)能力,可在粉塵、油污等工業(yè)環(huán)境中穩(wěn)定工作,無需人工頻繁清理維護(hù),既保證了數(shù)據(jù)采集的準(zhǔn)確性,也減少了人工在惡劣環(huán)境下作業(yè)的健康風(fēng)險(xiǎn),這與其產(chǎn)品具備IP67工業(yè)級(jí)防水防塵、超強(qiáng)抗干擾能力的特性密不可分。

洛微科技典型物體點(diǎn)云效果圖
第二步:坐標(biāo)定位——分析數(shù)據(jù),確定“抓哪里、怎么抓”
收集到點(diǎn)云數(shù)據(jù)后,3D視覺系統(tǒng)會(huì)像大腦一樣,對(duì)數(shù)據(jù)進(jìn)行處理,核心完成兩件事:提取貨物輪廓、判斷貨物姿態(tài),最終轉(zhuǎn)化為機(jī)器人能識(shí)別的三維坐標(biāo)。
首先是貨物輪廓提取:系統(tǒng)會(huì)從海量點(diǎn)云數(shù)據(jù)中,篩選出屬于貨物的點(diǎn),剔除托盤、地面等無關(guān)信息,精準(zhǔn)勾勒出單個(gè)貨物的立體輪廓——比如紙箱是長方體、料箱有特定的邊角結(jié)構(gòu),哪怕貨物有輕微變形、粘連,也能通過實(shí)例分割算法(如Mask R-CNN),精準(zhǔn)區(qū)分單個(gè)貨物,避免抓取時(shí)誤抓多個(gè)或抓空。這種算法就像給每個(gè)貨物“畫專屬輪廓線”,哪怕多個(gè)貨物緊密貼合,也能清晰區(qū)分邊界。
其次是姿態(tài)判斷:這是確保抓取穩(wěn)定的關(guān)鍵。系統(tǒng)會(huì)通過算法分析貨物的擺放角度,比如紙箱是正放、側(cè)放還是傾斜,料箱是否嵌合,最終確定貨物的四維位姿——也就是三維空間坐標(biāo)(X、Y、Z,對(duì)應(yīng)前后、左右、上下位置)和旋轉(zhuǎn)角度(R,對(duì)應(yīng)貨物的擺放方向)。這個(gè)過程就像我們拿起一個(gè)傾斜的盒子前,會(huì)先判斷它的角度,再調(diào)整手勢(shì),確保抓得穩(wěn)。
這里還要完成一個(gè)關(guān)鍵步驟:坐標(biāo)轉(zhuǎn)換。因?yàn)?D相機(jī)的視野坐標(biāo)系和機(jī)器人的動(dòng)作坐標(biāo)系不一樣,系統(tǒng)需要通過手眼標(biāo)定,建立兩者的轉(zhuǎn)換關(guān)系,把貨物在相機(jī)視野里的坐標(biāo),轉(zhuǎn)化為機(jī)器人手臂能精準(zhǔn)到達(dá)的坐標(biāo),相當(dāng)于給機(jī)器人“校準(zhǔn)方向”,避免出現(xiàn)“看得到、夠不著”或“抓不準(zhǔn)”的情況。
第三步:機(jī)器人聯(lián)動(dòng)——接收指令,完成拆碼垛動(dòng)作
當(dāng)3D相機(jī)完成掃描和定位,就會(huì)把處理好的坐標(biāo)、姿態(tài)信息,以指令的形式發(fā)送給機(jī)器人。機(jī)器人接到指令后,會(huì)根據(jù)貨物特性調(diào)整抓取策略:比如抓取紙箱時(shí),會(huì)選擇平整的側(cè)面或頂面,避免捏變形;抓取易變形的麻袋時(shí),會(huì)調(diào)整夾具力度,確保穩(wěn)固;抓取緊密嵌合的料箱時(shí),會(huì)規(guī)劃避障路徑,避免碰撞。
拆垛時(shí),系統(tǒng)會(huì)自動(dòng)規(guī)劃最優(yōu)抓取順序,優(yōu)先抓取頂層貨物,避免干擾下層貨物;碼垛時(shí),會(huì)根據(jù)預(yù)設(shè)的垛型(或自動(dòng)生成垛型),引導(dǎo)機(jī)器人將貨物整齊擺放,甚至支持多品類混碼、半垛續(xù)碼,提升托盤利用率。整個(gè)過程中,系統(tǒng)還會(huì)實(shí)時(shí)進(jìn)行碰撞檢測(cè),規(guī)避抓取、搬運(yùn)過程中的干涉風(fēng)險(xiǎn),確保動(dòng)作安全穩(wěn)定。
三、核心邏輯簡(jiǎn)化:不用懂技術(shù),也能get關(guān)鍵要點(diǎn)
很多入門者看到“點(diǎn)云數(shù)據(jù)”“姿態(tài)判斷”“坐標(biāo)轉(zhuǎn)換”會(huì)覺得復(fù)雜,其實(shí)我們可以用通俗的方式理解這三個(gè)核心邏輯,結(jié)合常見物料特性更易上手:
- 點(diǎn)云數(shù)據(jù)采集:相當(dāng)于給貨物掃一遍全身,不管是紙箱、料箱還是托盤,都能通過無數(shù)個(gè)3D點(diǎn),還原它的真實(shí)大小和形狀,哪怕有反光、變形也能精準(zhǔn)捕捉,這是看清貨物的基礎(chǔ);
- 貨物輪廓提取:相當(dāng)于從一堆貨物中,挑出單個(gè)貨物,畫出它的輪廓,區(qū)分開貨物和托盤、貨物和貨物,解決分不清哪個(gè)是哪個(gè)的問題,尤其適合混碼垛場(chǎng)景;
- 姿態(tài)判斷:相當(dāng)于判斷貨物躺得正不正、歪了多少,再告訴機(jī)器人從哪個(gè)角度抓最穩(wěn),比如紙箱傾斜時(shí),機(jī)器人會(huì)調(diào)整手臂角度,避免抓取時(shí)滑落,適配不同物料的抓取需求。
四、常見物料適配:不同貨物,“機(jī)器眼”如何針對(duì)性應(yīng)對(duì)?
3D視覺拆碼垛的優(yōu)勢(shì)的之一,就是能適配多種常見物料,針對(duì)不同物料的特性,系統(tǒng)會(huì)調(diào)整識(shí)別和抓取策略,具體可以參考以下常見場(chǎng)景:
1. 紙箱:最常見的拆碼垛物料,表面可能有圖案、扎帶或褶皺,系統(tǒng)通過實(shí)例分割算法精準(zhǔn)提取輪廓,忽略表面無關(guān)紋理,抓取時(shí)優(yōu)先選擇平整區(qū)域,避免捏壓變形,同時(shí)支持多品規(guī)紙箱混拆混碼;
2. 料箱(周轉(zhuǎn)箱):常出現(xiàn)壁薄、緊密嵌合、箱內(nèi)工件反光等問題,系統(tǒng)通過高精度點(diǎn)云采集和抗反光算法,清晰識(shí)別箱口位置,規(guī)劃拖拽式抓取路徑,避免嵌合時(shí)無法抓取,適配多種品規(guī)料箱的中轉(zhuǎn)搬運(yùn);
3. 軟包(麻袋/蛇皮袋):核心難點(diǎn)在于形態(tài)不固定,易產(chǎn)生褶皺、變形,且通常垛型混亂(如六花垛),識(shí)別和抓取難度較高。技術(shù)對(duì)策是引入AI深度學(xué)習(xí)算法,專門識(shí)別袋狀物特征,即便軟包嚴(yán)重變形,也能精準(zhǔn)計(jì)算出重心偏上的最佳抓取點(diǎn),同時(shí)配合專用吸盤或力控夾具,精準(zhǔn)控制抓取力度,實(shí)現(xiàn)“零破損”抓取,適配六花垛等復(fù)雜垛型的拆碼垛需求。
4. 托盤:作為貨物的承載工具,系統(tǒng)會(huì)先識(shí)別托盤的位置和尺寸,避開托盤邊緣,確保機(jī)器人抓取貨物時(shí)不碰撞托盤,同時(shí)根據(jù)托盤尺寸規(guī)劃碼垛密度,提升空間利用率;
5. 特殊物料:比如易變形的麻袋、透明膜包、高反光的金屬錠等,系統(tǒng)通過深度學(xué)習(xí)算法和特殊補(bǔ)光技術(shù),應(yīng)對(duì)變形、反光等問題,麻袋拆垛可適配五花垛、交叉垛等多種垛型,透明膜包則通過增強(qiáng)點(diǎn)云對(duì)比度,確保輪廓清晰。
五、總結(jié)
其實(shí)3D視覺引導(dǎo)拆碼垛的核心邏輯很簡(jiǎn)單:用3D相機(jī)掃描貨物、收集立體數(shù)據(jù),再通過算法處理數(shù)據(jù)、確定貨物的位置和姿態(tài),最后給機(jī)器人發(fā)指令,完成精準(zhǔn)拆碼垛。它的優(yōu)勢(shì)在于柔性化——不用預(yù)設(shè)程序,能應(yīng)對(duì)不同品規(guī)、不同擺放狀態(tài)的貨物,解決傳統(tǒng)機(jī)器人死板的問題。隨著ToF傳感器成本的下降和深度學(xué)習(xí)算法的迭代,這項(xiàng)技術(shù)正在從“可選”變?yōu)椤氨剡x”,成為智能制造和智慧物流的基礎(chǔ)設(shè)施。無論你是關(guān)注視覺引導(dǎo)拆垛機(jī)器人技術(shù)的工程師,還是正在尋求自動(dòng)化升級(jí)的倉庫管理者,希望這篇文章能對(duì)你有所幫助。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31200瀏覽量
222974 -
機(jī)械臂
+關(guān)注
關(guān)注
14文章
597瀏覽量
26155 -
3D視覺
+關(guān)注
關(guān)注
4文章
485瀏覽量
29267 -
3D相機(jī)
+關(guān)注
關(guān)注
0文章
144瀏覽量
9036
發(fā)布評(píng)論請(qǐng)先 登錄
基于3D視覺技術(shù)的機(jī)器人系統(tǒng)
碼垛機(jī)器人的優(yōu)點(diǎn)詳細(xì)介紹
搬運(yùn)碼垛機(jī)器人
服務(wù)機(jī)器人的視覺系統(tǒng)怎么設(shè)計(jì)?
未來的機(jī)器人3D視覺系統(tǒng)將會(huì)發(fā)生什么樣的變化?
機(jī)器人搬運(yùn)碼垛工作站介紹
ZN-980B機(jī)器人搬運(yùn)碼垛工作站介紹
工業(yè)機(jī)器人視覺裝配實(shí)訓(xùn)平臺(tái)實(shí)驗(yàn)
四元數(shù)數(shù)控:深圳機(jī)器視覺引導(dǎo)定位是什么?
機(jī)器人3D視覺引導(dǎo)系統(tǒng)的詳細(xì)資料概述
剖析3D視覺引導(dǎo)的拆裝模機(jī)器人系統(tǒng)設(shè)計(jì)
海康機(jī)器人推出基于機(jī)器視覺引導(dǎo)機(jī)械臂拆碼垛方案
高效靈活,3D視覺引導(dǎo)紙箱拆碼垛助力倉儲(chǔ)物流創(chuàng)新
紙箱的拆碼垛,3D視覺引導(dǎo)機(jī)器人無序抓取



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論