 【先楫半導體HPM6750EVKMINI評估板試用體驗】基準性能測試之二:coremark
【先楫半導體HPM6750EVKMINI評估板試用體驗】基準性能測試之二:coremark

本文來源電子發燒友社區,作者:李先生, 帖子地址:https://bbs.elecfans.com/jishu_2284342_1_1.html
前言
 獲取代碼
獲取代碼
 添加代碼
添加代碼
 修改代碼
修改代碼
前言
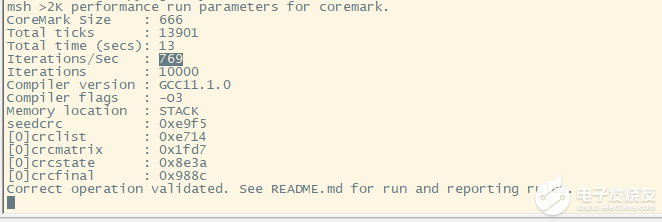
根據手冊描述性能可達5.6 CoreMark / MHz。
我們就實際”跑個分”看看。
https://github.com/eembc/coremark
進入HPM6750EVKMINI/proj/led目錄
Clone代碼
git clonehttps://github.com/eembc/coremark
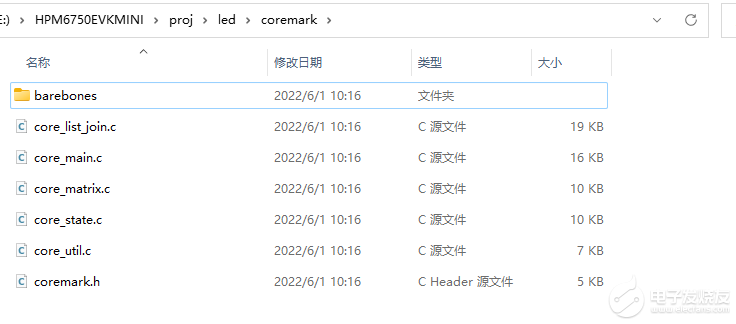
刪除其他文件,只保留如下內容,并刪除barebones下的.mak文件
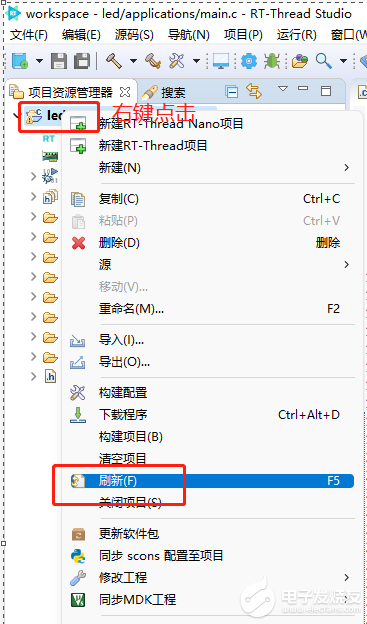
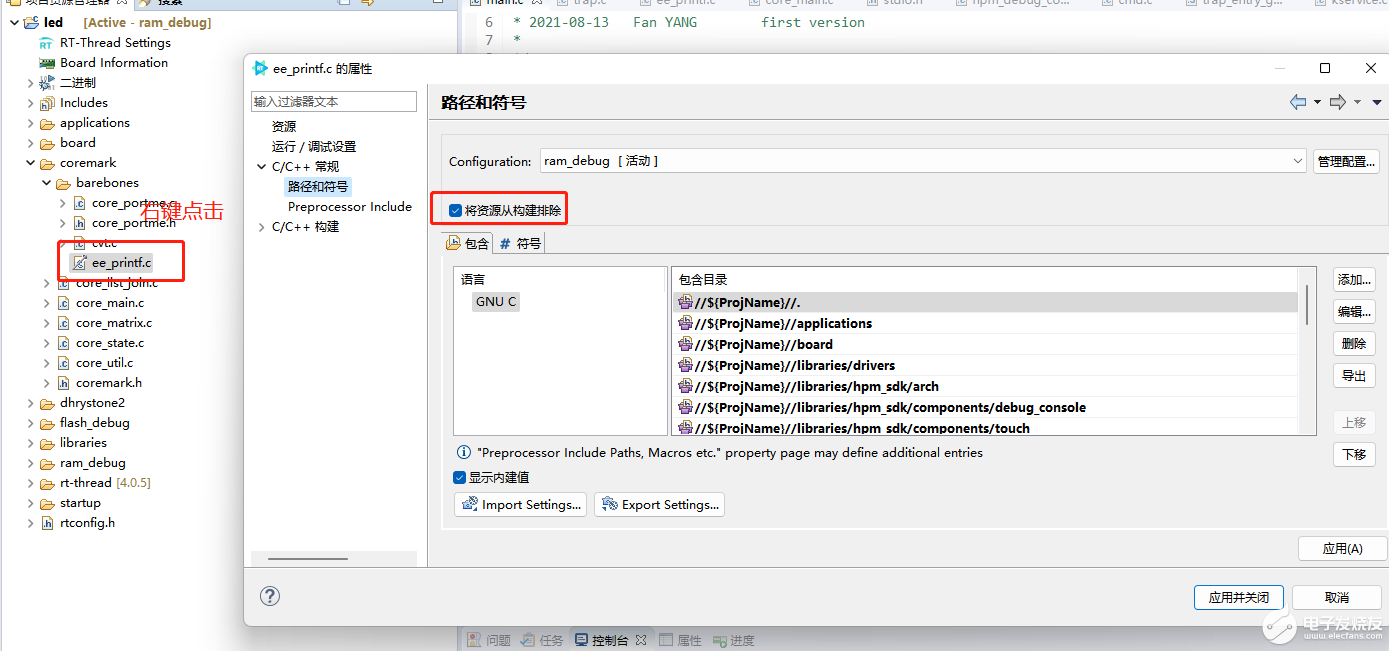
按照上一步將文件下載到工程目錄下后,按照如下方式刷新
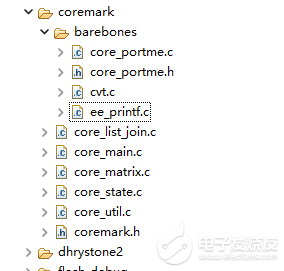
可以看到源碼添加到了工程目錄
按如下設置不編譯ee_printf.c因為已經有打印函數rt_kprintf。
coremark.h中
#include"rtthread.h"
#include"core_portme.h"改為
#include"barebones/core_portme.h"
增加宏定義
#ifHAS_PRINTF
#defineee_printf printf
#endif
改為
//#ifHAS_PRINTF
#defineee_printfrt_kprintf
//#endif
core_portme.h中
#defineHAS_FLOAT1
改為
#defineHAS_FLOAT0
前面添加#include
#defineCOMPILER_FLAGS
FLAGS_STR/* "Please put compiler flags here (e.g. -o3)" */
#endif
按照實際修改比如
#defineCOMPILER_FLAGS
“-O3”
#endif
core_portme.c中
#include"coremark.h"改為
#include"../coremark.h"
實現接口
barebones_clock()
使用rt_tick_get()
所以前面要包含#include"rtthread.h"
CORETIMETYPE
barebones_clock()
{
//#error
// "You must implement a method to measure time in barebones_clock()! This function should return current time.n"
returnrt_tick_get();
}
#defineEE_TICKS_PER_SEC (CLOCKS_PER_SEC / TIMER_RES_DIVIDER)改為
#defineEE_TICKS_PER_SEC RT_TICK_PER_SECOND
因為已經初始化了環境所以注釋掉portable_init的
//#error
// "Call board initialization routines in portableinit(if needed), in particular initialize UART!n"
core_main.c中
main改為core_main
ee_printf("Total time (secs): %dn", time_in_secs(total_time));改為
ee_printf("Total time (millisecond): %dn", time_in_secs(total_time*1000));
if(time_in_secs(total_time) > 0)
ee_printf("Iterations/Sec : %dn",
(int)((default_num_contexts * results[0].iterations*1000.0
/ time_in_secs(total_time*1000))));
main.c中
調用
intcore_main(intargc,char*argv[]);
core_main(0, 0);
由于定義了大數組
#if(MEM_METHOD == MEM_STACK)
ee_u8stack_memblock[TOTAL_DATA_SIZE * MULTITHREAD];
#endif
所以main的任務棧要修改大一些
Rtconfig.h中#defineRT_MAIN_THREAD_STACK_SIZE (2048*4)
main任務優先級也提高一點大于shell的優先級
#defineRT_MAIN_THREAD_PRIORITY 21
測試
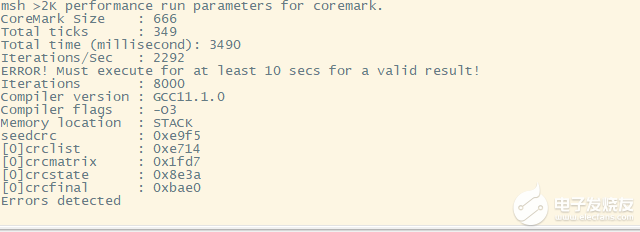
如果提示ERROR! Must execute for at least 10 secs for a valid result!
則將#defineITERATIONS 10000改大一點,測試時間要大于10秒。
配置為0則自動計算迭代次數。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
mcu
+關注
關注
147文章
18925瀏覽量
398188 -
先楫半導體
+關注
關注
12文章
285瀏覽量
3301
發布評論請先 登錄
相關推薦
熱點推薦
【媒體視角】“五高一低” 筑核心,先楫半導體助力具身智能行業新突破
及嵌入式解決方案核心提供商,上海先楫半導體科技有限公司(先楫半導體、HPMicro)緊跟產業浪潮

CES2026:先楫半導體隆重推出HPM5E3Y,打造機器人運動控制芯片陣容
新紀元。作為高性能微控制器產品及嵌入式解決方案提供商,上海先楫半導體科技有限公司 (先楫

先楫半導體榮膺“年度優秀AI機器人創新產品獎” | “芯”動力賦能產業升級
2025年11月6日深圳,在業內知名媒體電子發燒友網主辦的第十三屆電機控制先進技術論壇上,上海先楫半導體科技有限公司(先楫

元禾控股投資先楫半導體:國產高性能MCU駛入機器人控制“快車道”
RISC-V高性能芯片賽道。此次融資不僅是對先楫半導體企業技術實力的認可,更標志著我們開啟在機器人控制領域從“蓄勢待發”到逼近爆發臨界點的新篇章。隨著全球智能機器人產
【上海晶珩睿莓1開發板試用體驗】4、Coremark性能測試
CoreMark 介紹
CoreMark 是由 EEMBC(嵌入式微處理器基準委員會)維護的一個輕量、可移植的基準套件,用于評估處理器的整型
發表于 08-18 22:18
先楫半導體高性能MCU入駐立創商城,國產芯勢力再添新動能
先楫半導體(HPMicro)宣布其全系列高性能MCU芯片正式上架立創商城(LCSC),標志著國產高端MCU在供應鏈渠道與生態服務方面邁上新臺階,國產芯勢力再添新動能。
先楫半導體HPM6E8Y:先楫實時控制芯片驅動的機器人關節“芯”時代
及產品總監費振東帶來了一款實時控制芯片驅動——HPM6E8Y。 ? ? 據費振東介紹,先楫半導體HPM6E8Y系列高
發表于 05-13 11:50
?1797次閱讀

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖
2025年5月6日 上海 |高性能微控制器及嵌入式解決方案提供商“上海先楫半導體科技有限公司”(先楫
發表于 05-07 14:07
?1133次閱讀

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖
2025年5月6日上海|高性能微控制器及嵌入式解決方案提供商“上海先楫半導體科技有限公司”(先楫
重磅更新 | 先楫半導體HPM_SDK v1.9.0 發布
版本更新概況[New]增加HPM6P00系列MCU以及hpm6p00evk支持[New]增加了開發板已知問題說明[Update]將全系列開發板VCore電壓調節至1.275V,
600MHz RISC-V 雙核加持!先楫HPM6P00重新定義國產高性能混合信號MCU
2025年3月25日,上海——高性能微控制器及嵌入式解決方案提供商上海先楫半導體科技有限公司(先楫



 工商網監
工商網監
評論