") 英偉達何以成為車廠自動駕駛開發(fā)的首選
英偉達何以成為車廠自動駕駛開發(fā)的首選

英偉達在今年的秋季GTC大會上發(fā)布了下一代自動駕駛芯片Thor,再次點燃了自動駕駛算力比拼的導(dǎo)火索。我們已經(jīng)看到國內(nèi)汽車市場中,蔚來、智已、飛凡等廠商積極在新車型上集成這一代Orin芯片,Thor能收獲怎樣的市場反響已經(jīng)可以預(yù)知。其實英偉達所做的遠不止于此,他們的王牌是一整套DRIVE自動駕駛軟硬件生態(tài)。
從車端到云端
NAD是蔚來打造的全棧自動駕駛方案,在車身的Aquila超級傳感系統(tǒng)上,蔚來選擇了33個高性能的傳感單元,包括7個800萬像素的高分辨率攝像頭、4個300萬像素的環(huán)視專用攝像頭、1個1550nm的超長測距激光雷達、5個毫米波雷達、12個USS超聲波傳感器、兩個高精度定位單元(GNSS+IMU)、1個V2X和一個ADMS。
然而,這樣龐大的傳感系統(tǒng),也帶來了更大的數(shù)據(jù)吞吐量,根據(jù)蔚來的說明,Aquila每秒要傳輸8GB的數(shù)據(jù)。要完成如此規(guī)模的數(shù)據(jù)計算量,車身上必須具備強大的算力,所以蔚來的Adam超級計算系統(tǒng)配置了4個英偉達DriveOrin,將算力提高至1016TOPS,以滿足自動駕駛的計算要求。
蔚來自動駕駛開發(fā)平臺/ 蔚來
但自動駕駛從來都不只是車端的工作,如何訓(xùn)練并利用這些得到的數(shù)據(jù),提高自動駕駛算法的可靠性,才是廠商們需要持續(xù)發(fā)力的工作。這里我就拿大家最關(guān)注的一個功能來分析一下,AEB緊急制動功能。
蔚來稱在研發(fā)初期,他們需要在10天內(nèi)制作出100萬個數(shù)據(jù)分布較好的高質(zhì)量素材,以求滿足最低的精度和時延要求。后續(xù)就要在英偉達的GPU上跑AI負(fù)載,這個過程需要200個GPU整整運行3個月。
除了訓(xùn)練以外,為了確保NAD在引入新改進后既能解決相應(yīng)的問題,又不會引入新的問題,蔚來還基于英偉達的開源推理服務(wù)器軟件Triton打造了一套高性能的推理服務(wù),每天開展10萬個推理任務(wù),用于數(shù)據(jù)挖掘、仿真和回歸測試等。
值得一提的是,目前蔚來的NAD尚未正式投入使用,不少人都想知道他們與其他競爭對手公司的自動駕駛系統(tǒng)有何差距。不過蔚來表示,他們的產(chǎn)品團隊正在測試NAD與其他自動駕駛方案的性能對比,待報告完成后會公開分享出來。
合成數(shù)據(jù)加速自動駕駛開發(fā)
打從一開始,我們都對合成數(shù)據(jù)有著或多或少的偏見,認(rèn)為這是假數(shù)據(jù),怎么能用在以安全為第一要義的自動駕駛中呢?但事實上,在物理屬性準(zhǔn)確的合成數(shù)據(jù)下,我們甚至可以將其看作是罕見的真實數(shù)據(jù)。
就拿車禍來說,盡管這是常見道路情況之一,但相對正常駕駛的數(shù)據(jù)來說,采集到的真實車禍數(shù)據(jù)在數(shù)量上肯定是遠遠不及的,更別說拿來做仿真訓(xùn)練了,在汽車試驗場中測出來的車禍數(shù)據(jù)也難以代表真實路況數(shù)據(jù)。至于那些更稀少但又并非不存在的情況,比如貨箱、輪胎脫落等,也都是會對自動駕駛場景造成干擾的。
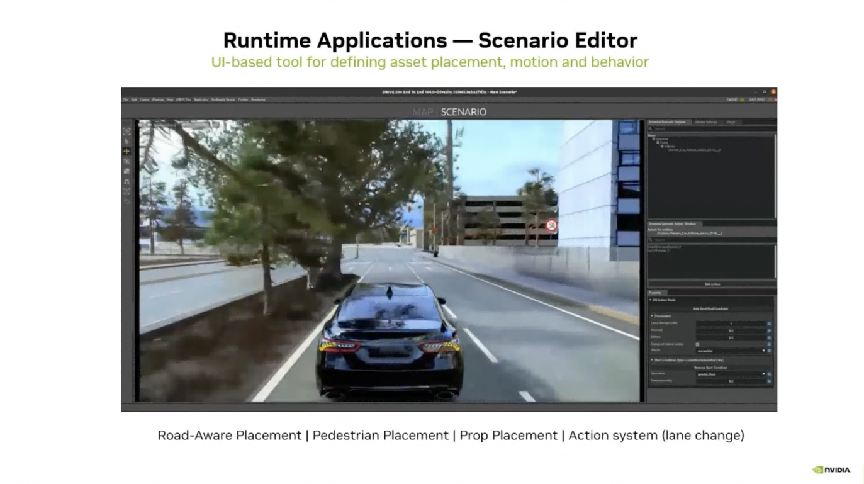
英偉達DRIVE Sim中的DRIVE Replicator就為開發(fā)者提供了一個生成各種合成數(shù)據(jù)集,并具備真值標(biāo)簽的平臺,為訓(xùn)練和驗證一個覆蓋全場景的自動駕駛算法提供幫助。至于合成數(shù)據(jù)中常見的數(shù)據(jù)偏見問題,DRIVE Replicator提供了隨機化引擎,通過泛化來讓虛擬域的數(shù)據(jù)盡可能涵蓋到真實域。DRIVE Sim的場景編輯已經(jīng)實現(xiàn)了相當(dāng)優(yōu)秀的隨機化,比如借助SimReadyAPI實時改變自然/人工光線、路況天氣等等。
除此之外DRIVE Replicator還可以通過PythonAPI對USD模型和屬性實現(xiàn)直接控制來完成隨機化,比如隨機將一個包含動量數(shù)據(jù)的物體隔空生成在路面上。盡管這已經(jīng)超出了真實的范疇,但這對于訓(xùn)練自動駕駛算法對于VRU(弱勢道路使用者)的識別相當(dāng)有用,比如突然出現(xiàn)在汽車后方的小孩等。
至于傳感器的仿真建模,英偉達也已經(jīng)在著手打造自己的一套驗證系統(tǒng),以求在真實環(huán)境和仿真環(huán)境中,得到相匹配的傳感器數(shù)據(jù),比如攝像頭在麥克佩斯色卡下展現(xiàn)與真實環(huán)境一樣的色彩和亮度。
DRIVE SIM——英偉達在自動駕駛仿真上的CUDA?
可能從多數(shù)人的視角看來,英偉達在汽車上的動作僅僅支持推出自動駕駛芯片而已,就像大多數(shù)車廠在發(fā)布會上提及的那樣,新車型搭載了哪些芯片等等。但事實上英偉達對自動駕駛技術(shù)的投入遠不只有芯片,英偉達已經(jīng)基于Omniverse這一技術(shù)底座,打造了DRIVE Sim這樣一個龐大的互通仿真平臺。這對于汽車廠商來說具有很重要的意義,因為不僅是造車新勢力,老牌車廠也享受到了英偉達提供的自動駕駛開發(fā)工作流帶來的便利。
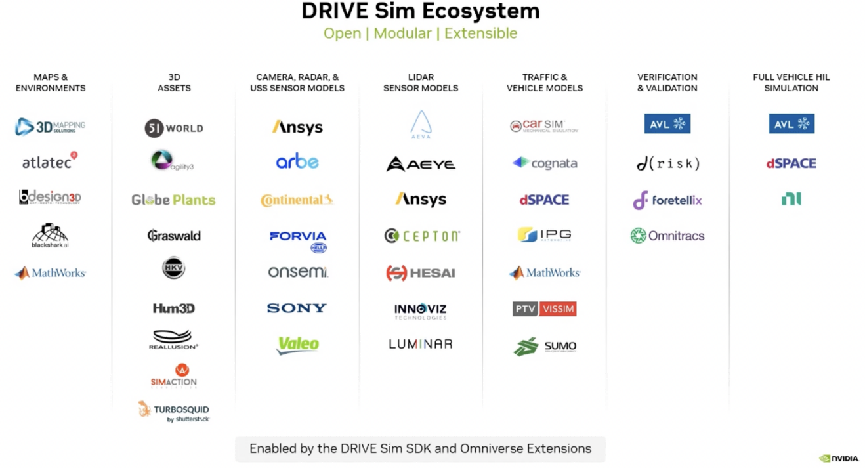
DRIVE Sim合作生態(tài)/ 英偉達
比如蔚來等一眾造車新勢力,他們在自動駕駛傳感器的選擇上是相當(dāng)多樣化的,而英偉達的DRIVE Sim已經(jīng)通過一系列API加入了對通用和Hyperion傳感器套件的配置和擴展,無疑極大地減輕汽車廠商的開發(fā)工作量。而傳感器廠商也在積極加入對DRIVE Sim的支持,諸如索尼、禾賽和Luminar等等。一是他們也沒有這么多精力來打造這樣一個互通的開發(fā)生態(tài),二是英偉達在提供傳感器開發(fā)自由度的同時,也給到了對專有IP的保護,因為英偉達并不需要知道這些傳感器的實現(xiàn)方式。
而這樣一個軟件生態(tài)卻又與英偉達的硬件息息相關(guān),甚至在新發(fā)布的L40等硬件上能發(fā)揮出更大的優(yōu)勢,似乎又一個CUDA生態(tài)呼之欲出,而這次是出現(xiàn)在自動駕駛上。不由得讓人佩服起英偉達,在這些TO B產(chǎn)品的軟硬件生態(tài)融合上,他們確實是無可匹敵的。
從車端到云端
NAD是蔚來打造的全棧自動駕駛方案,在車身的Aquila超級傳感系統(tǒng)上,蔚來選擇了33個高性能的傳感單元,包括7個800萬像素的高分辨率攝像頭、4個300萬像素的環(huán)視專用攝像頭、1個1550nm的超長測距激光雷達、5個毫米波雷達、12個USS超聲波傳感器、兩個高精度定位單元(GNSS+IMU)、1個V2X和一個ADMS。
然而,這樣龐大的傳感系統(tǒng),也帶來了更大的數(shù)據(jù)吞吐量,根據(jù)蔚來的說明,Aquila每秒要傳輸8GB的數(shù)據(jù)。要完成如此規(guī)模的數(shù)據(jù)計算量,車身上必須具備強大的算力,所以蔚來的Adam超級計算系統(tǒng)配置了4個英偉達DriveOrin,將算力提高至1016TOPS,以滿足自動駕駛的計算要求。
蔚來自動駕駛開發(fā)平臺/ 蔚來
但自動駕駛從來都不只是車端的工作,如何訓(xùn)練并利用這些得到的數(shù)據(jù),提高自動駕駛算法的可靠性,才是廠商們需要持續(xù)發(fā)力的工作。這里我就拿大家最關(guān)注的一個功能來分析一下,AEB緊急制動功能。
蔚來稱在研發(fā)初期,他們需要在10天內(nèi)制作出100萬個數(shù)據(jù)分布較好的高質(zhì)量素材,以求滿足最低的精度和時延要求。后續(xù)就要在英偉達的GPU上跑AI負(fù)載,這個過程需要200個GPU整整運行3個月。
除了訓(xùn)練以外,為了確保NAD在引入新改進后既能解決相應(yīng)的問題,又不會引入新的問題,蔚來還基于英偉達的開源推理服務(wù)器軟件Triton打造了一套高性能的推理服務(wù),每天開展10萬個推理任務(wù),用于數(shù)據(jù)挖掘、仿真和回歸測試等。
值得一提的是,目前蔚來的NAD尚未正式投入使用,不少人都想知道他們與其他競爭對手公司的自動駕駛系統(tǒng)有何差距。不過蔚來表示,他們的產(chǎn)品團隊正在測試NAD與其他自動駕駛方案的性能對比,待報告完成后會公開分享出來。
合成數(shù)據(jù)加速自動駕駛開發(fā)
打從一開始,我們都對合成數(shù)據(jù)有著或多或少的偏見,認(rèn)為這是假數(shù)據(jù),怎么能用在以安全為第一要義的自動駕駛中呢?但事實上,在物理屬性準(zhǔn)確的合成數(shù)據(jù)下,我們甚至可以將其看作是罕見的真實數(shù)據(jù)。
就拿車禍來說,盡管這是常見道路情況之一,但相對正常駕駛的數(shù)據(jù)來說,采集到的真實車禍數(shù)據(jù)在數(shù)量上肯定是遠遠不及的,更別說拿來做仿真訓(xùn)練了,在汽車試驗場中測出來的車禍數(shù)據(jù)也難以代表真實路況數(shù)據(jù)。至于那些更稀少但又并非不存在的情況,比如貨箱、輪胎脫落等,也都是會對自動駕駛場景造成干擾的。
 ?
?英偉達DRIVE Sim中的DRIVE Replicator就為開發(fā)者提供了一個生成各種合成數(shù)據(jù)集,并具備真值標(biāo)簽的平臺,為訓(xùn)練和驗證一個覆蓋全場景的自動駕駛算法提供幫助。至于合成數(shù)據(jù)中常見的數(shù)據(jù)偏見問題,DRIVE Replicator提供了隨機化引擎,通過泛化來讓虛擬域的數(shù)據(jù)盡可能涵蓋到真實域。DRIVE Sim的場景編輯已經(jīng)實現(xiàn)了相當(dāng)優(yōu)秀的隨機化,比如借助SimReadyAPI實時改變自然/人工光線、路況天氣等等。
除此之外DRIVE Replicator還可以通過PythonAPI對USD模型和屬性實現(xiàn)直接控制來完成隨機化,比如隨機將一個包含動量數(shù)據(jù)的物體隔空生成在路面上。盡管這已經(jīng)超出了真實的范疇,但這對于訓(xùn)練自動駕駛算法對于VRU(弱勢道路使用者)的識別相當(dāng)有用,比如突然出現(xiàn)在汽車后方的小孩等。
至于傳感器的仿真建模,英偉達也已經(jīng)在著手打造自己的一套驗證系統(tǒng),以求在真實環(huán)境和仿真環(huán)境中,得到相匹配的傳感器數(shù)據(jù),比如攝像頭在麥克佩斯色卡下展現(xiàn)與真實環(huán)境一樣的色彩和亮度。
DRIVE SIM——英偉達在自動駕駛仿真上的CUDA?
可能從多數(shù)人的視角看來,英偉達在汽車上的動作僅僅支持推出自動駕駛芯片而已,就像大多數(shù)車廠在發(fā)布會上提及的那樣,新車型搭載了哪些芯片等等。但事實上英偉達對自動駕駛技術(shù)的投入遠不只有芯片,英偉達已經(jīng)基于Omniverse這一技術(shù)底座,打造了DRIVE Sim這樣一個龐大的互通仿真平臺。這對于汽車廠商來說具有很重要的意義,因為不僅是造車新勢力,老牌車廠也享受到了英偉達提供的自動駕駛開發(fā)工作流帶來的便利。
DRIVE Sim合作生態(tài)/ 英偉達
比如蔚來等一眾造車新勢力,他們在自動駕駛傳感器的選擇上是相當(dāng)多樣化的,而英偉達的DRIVE Sim已經(jīng)通過一系列API加入了對通用和Hyperion傳感器套件的配置和擴展,無疑極大地減輕汽車廠商的開發(fā)工作量。而傳感器廠商也在積極加入對DRIVE Sim的支持,諸如索尼、禾賽和Luminar等等。一是他們也沒有這么多精力來打造這樣一個互通的開發(fā)生態(tài),二是英偉達在提供傳感器開發(fā)自由度的同時,也給到了對專有IP的保護,因為英偉達并不需要知道這些傳感器的實現(xiàn)方式。
而這樣一個軟件生態(tài)卻又與英偉達的硬件息息相關(guān),甚至在新發(fā)布的L40等硬件上能發(fā)揮出更大的優(yōu)勢,似乎又一個CUDA生態(tài)呼之欲出,而這次是出現(xiàn)在自動駕駛上。不由得讓人佩服起英偉達,在這些TO B產(chǎn)品的軟硬件生態(tài)融合上,他們確實是無可匹敵的。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
gpu
+關(guān)注
關(guān)注
28文章
5194瀏覽量
135433 -
英偉達
+關(guān)注
關(guān)注
23文章
4086瀏覽量
99173 -
自動駕駛
+關(guān)注
關(guān)注
793文章
14880瀏覽量
179800
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
如何設(shè)計好自動駕駛ODD?
為確定自動駕駛的可使用范圍,會給自動駕駛設(shè)置一個運行設(shè)計域(Operational Design Domain,ODD)。ODD的作用就是用來明確自動駕駛在什么情況下能工作,在什么情況下不能工作,給車設(shè)定“工作范圍”。
麥格納宣布擴大與英偉達的戰(zhàn)略合作
麥格納宣布擴大與英偉達的戰(zhàn)略合作,為整車廠基于英偉達DRIVE Hyperion平臺的項目落地提供支持。
黃仁勛:未來十年很多汽車是自動駕駛 英偉達發(fā)布Alpamayo汽車大模型平臺
最看好的AI落地場景就是自動駕駛。在演講中黃仁勛提到,未來十年,世界上很大一部分汽車將是自動駕駛或高度自動駕駛的。你期待嗎? 英偉達發(fā)布Al
L4級自動駕駛數(shù)據(jù)采集系統(tǒng)首選
引言:自動駕駛數(shù)據(jù)采集的核心挑戰(zhàn) 隨著L4級自動駕駛技術(shù)進入商業(yè)化落地階段,如何高效采集并處理海量多源傳感器數(shù)據(jù)成為行業(yè)痛點。康謀科技推出的 DATALynx高性能車載服務(wù)器 與 BRICK2車規(guī)
不同等級的自動駕駛技術(shù)要求上有何不同?
談到自動駕駛,不可避免地會涉及到自動駕駛分級,美國汽車工程師學(xué)會(SAE)根據(jù)自動駕駛系統(tǒng)與人類駕駛員參與駕駛行為程度的不同,將
自動駕駛汽車是如何準(zhǔn)確定位的?
[首發(fā)于智駕最前沿微信公眾號]隨著自動駕駛技術(shù)的快速發(fā)展,車輛的精準(zhǔn)定位成為安全駕駛與路徑規(guī)劃的核心基礎(chǔ)。相比于傳統(tǒng)人類駕駛依賴路標(biāo)和視覺判斷,自動

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術(shù)要求上有何不同?
[首發(fā)于智駕最前沿微信公眾號]自動駕駛技術(shù)的發(fā)展,讓組合輔助駕駛得到大量應(yīng)用,但現(xiàn)在對于自動駕駛技術(shù)的宣傳,普遍是在乘用車領(lǐng)域,而對于卡車、礦車的自動駕駛發(fā)展,卻鮮有提及。其實在卡車、

小鵬汽車在全球AI頂會展示下一代自動駕駛模型
Driving),與Waymo、英偉達、加利福尼亞大學(xué)洛杉磯分校(UCLA)、圖賓根大學(xué)(University of Tuebingen)等來自工業(yè)界和學(xué)術(shù)界的自動駕駛同行共同探討業(yè)界最新AI技術(shù)。
自動駕駛安全基石:ODD
電子發(fā)燒友網(wǎng)綜合報道 自動駕駛ODD(Operational Design Domain)即設(shè)計運行域,是指自動駕駛系統(tǒng)被設(shè)計為安全、有效運行的具體條件范圍。它定義了自動駕駛汽車在哪些環(huán)境、場景
從游戲到智能駕駛,英偉達有哪些技術(shù)升級?
[首發(fā)于智駕最前沿微信公眾號]在2025年國際消費電子展(CES 2025)上,英偉達重磅發(fā)布了其最新一代車規(guī)級自動駕駛芯片“Thor”,并同步展示了在智能汽車領(lǐng)域的技術(shù)進展與合作布局。英偉

偉創(chuàng)力攜手英偉達與Torc開啟自動駕駛卡車新紀(jì)元
近年來,自動駕駛技術(shù)的發(fā)展如火如荼。作為世界領(lǐng)先的汽車級計算平臺提供商的偉創(chuàng)力成為自動駕駛8級卡車商業(yè)化先驅(qū)——Torc的合作伙伴,并攜手技術(shù)巨頭英偉
NVIDIA Halos自動駕駛汽車安全系統(tǒng)發(fā)布
NVIDIA 整合了從云端到車端的安全自動駕駛開發(fā)技術(shù)套件,涵蓋車輛架構(gòu)到 AI 模型,包括芯片、軟件、工具和服務(wù)。 物理 AI 正在為自動駕駛和機器人開發(fā)技術(shù)的交叉領(lǐng)域釋放新的可能性
【重磅揭秘】英偉達Orin芯片:自動駕駛新紀(jì)元的核心驅(qū)動力,工程師必備指南免費下載!
在自動駕駛技術(shù)飛速發(fā)展的當(dāng)下,計算平臺的性能直接決定了技術(shù)創(chuàng)新的高度。英偉達Orin芯片,作為當(dāng)前行業(yè)內(nèi)的標(biāo)桿之作,正引領(lǐng)著自動駕駛邁向全新的境界。為助力您深入了解這一前沿技術(shù),我們精

自動駕駛開發(fā)需要海量數(shù)據(jù),但真實數(shù)據(jù)難以覆蓋所有復(fù)雜場景,如何解決?# 自動駕駛# 仿真# #汽車電子
自動駕駛
康謀自動駕駛
發(fā)布于 :2025年03月12日 10:50:45



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論