") 如何在LabVIEW環(huán)境中通過NISoftMotion驅(qū)動(dòng)配置與運(yùn)用NI9512
如何在LabVIEW環(huán)境中通過NISoftMotion驅(qū)動(dòng)配置與運(yùn)用NI9512

NI 9512是C系列步進(jìn)電機(jī)驅(qū)動(dòng)接口模塊,采用NI-RIO、NI-SoftMotion驅(qū)動(dòng),可以生成精確的步進(jìn)脈沖和方向信號(hào)。通過硬件集成,在保證步進(jìn)電機(jī)成本優(yōu)勢(shì)的同時(shí),大幅提升了其運(yùn)動(dòng)性能、系統(tǒng)集成度和同步精度。本文將帶你快速上手,重點(diǎn)講解如何在LabVIEW環(huán)境中,通過NI?SoftMotion驅(qū)動(dòng)配置與運(yùn)用NI 9512。
下面請(qǐng)跟隨小編一起來學(xué)習(xí)一下吧!
本文分享:
NI 9512使用教程
一、NI 9512板卡
1、板卡介紹
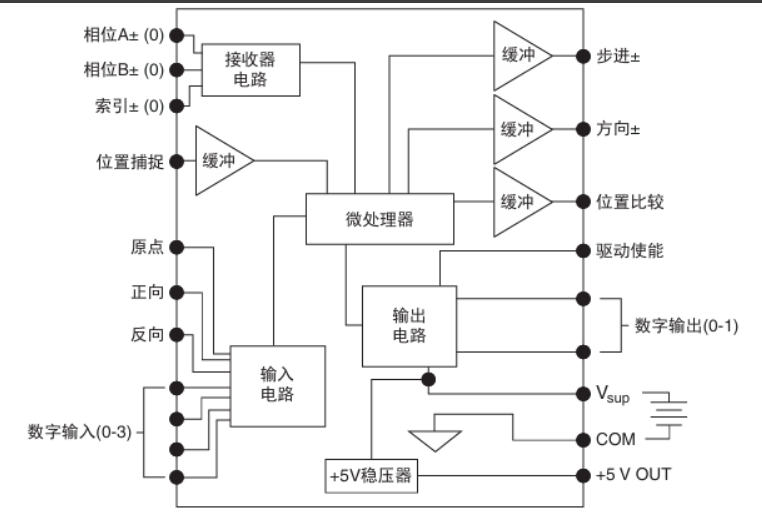
NI 9512是單軸、單編碼器C系列步進(jìn)電機(jī)驅(qū)動(dòng)接口模塊。板卡提供了用于單軸的步進(jìn)驅(qū)動(dòng)器接口信號(hào)、一套完整的運(yùn)動(dòng)I/O(包括用于原點(diǎn)開關(guān)和限位開關(guān)的輸入I/O)、用于位置反饋的增量編碼器輸入以及通用輸入和輸出。 板卡還包含了高級(jí)運(yùn)動(dòng)功能,如位置捕獲和位置比較,并可直接連接到P7000系列步進(jìn)驅(qū)動(dòng)器。 NI?9512處理器運(yùn)行樣條插值引擎和NI申請(qǐng)專利的步長生成算法,可產(chǎn)生更平滑的運(yùn)動(dòng),從而實(shí)現(xiàn)精確的步進(jìn)運(yùn)動(dòng)控制。
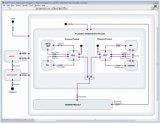
2、原理框圖
3、接線圖

4、引腳圖
DSUB引腳圖
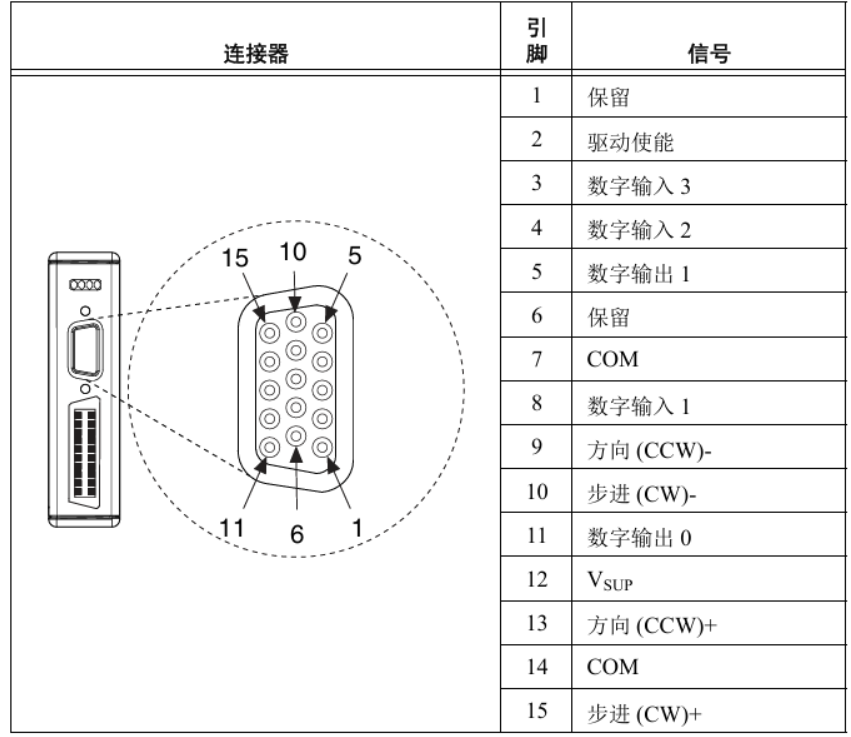
MDR連接器引腳圖

二、步進(jìn)指令信號(hào)
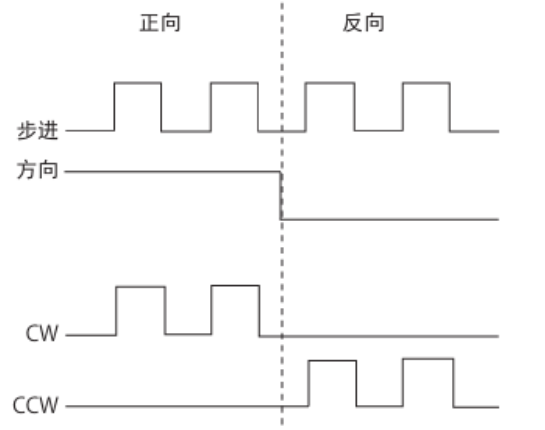
NI 9512驅(qū)動(dòng)接口模塊的步進(jìn)指令輸出信號(hào)分為兩種,分別為步進(jìn)和方向、正轉(zhuǎn)(CW)和反轉(zhuǎn)(CCW)脈沖輸出。輸出的模式可通過軟件進(jìn)行配置,以廣泛兼容第三方驅(qū)動(dòng)。
當(dāng)配置為步進(jìn)和方向模式時(shí),步進(jìn)信號(hào)發(fā)出的脈沖數(shù)決定了電機(jī)轉(zhuǎn)動(dòng)角度,方向信號(hào)就是電平信號(hào),決定電機(jī)轉(zhuǎn)動(dòng)的方向。正轉(zhuǎn)加高電平,反轉(zhuǎn)加低電平。當(dāng)電機(jī)朝一個(gè)方向轉(zhuǎn)動(dòng)時(shí),此信號(hào)保持原有電平,不需要改變。
當(dāng)配置為CW和CCW模式時(shí),在CW輸出上產(chǎn)生脈沖來指令正向運(yùn)動(dòng),在CCW輸出上產(chǎn)生脈沖來指令反向運(yùn)動(dòng)。
三、操作步驟
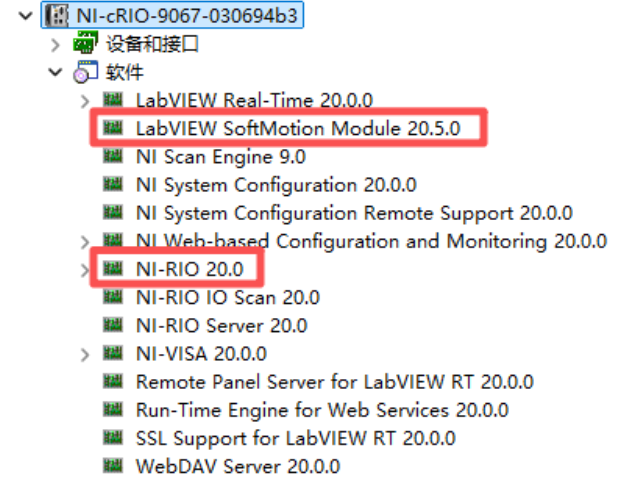
1、驅(qū)動(dòng)配置
在上位機(jī)中安裝NI-RIO、NI-SoftMotion驅(qū)動(dòng),將其添加至NI RT下位機(jī)中。
2、搭建項(xiàng)目
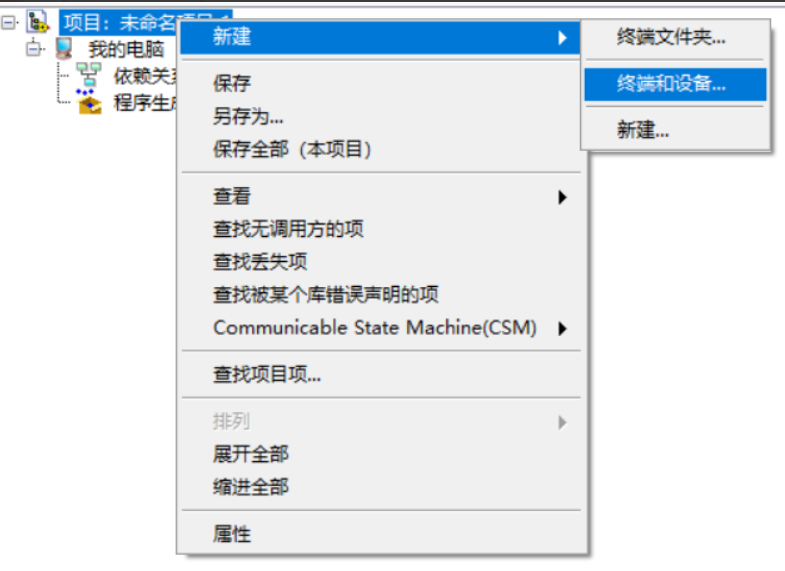
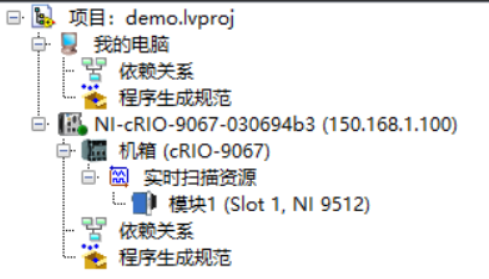
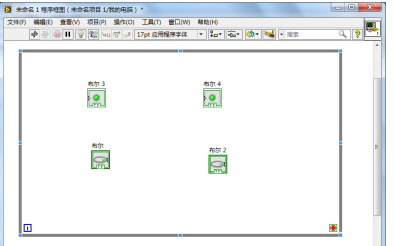
在LabVIEW中創(chuàng)建新項(xiàng)目,右鍵單擊項(xiàng)目瀏覽器窗口中的項(xiàng)目項(xiàng),從快捷菜單中選擇新建?終端和設(shè)備。
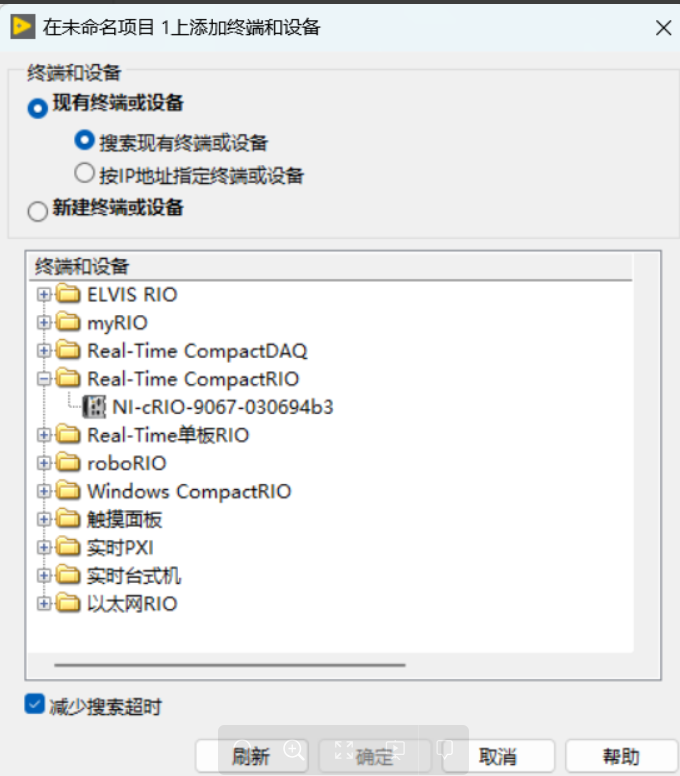
選擇要添加至項(xiàng)目的CompactRIO控制器,然后單擊確定。
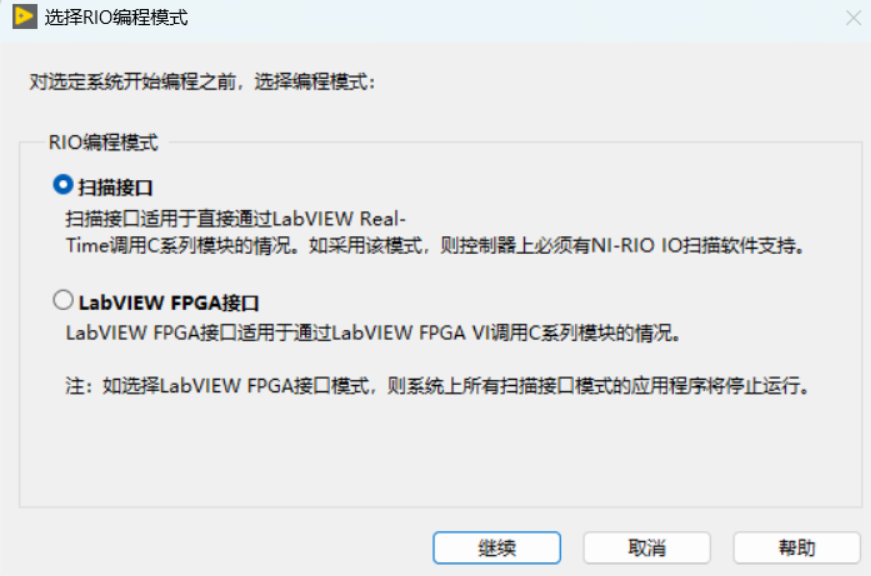
如已安裝LabVIEW FPGA,將出現(xiàn)選擇編程模式對(duì)話框。選擇掃描接口,將系統(tǒng)置為掃描接口模式。
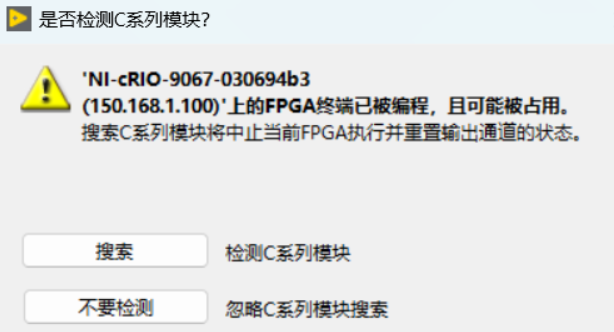
檢測(cè)C系列模塊。
LabVIEW將控制器、機(jī)箱和所有模塊添加至項(xiàng)目。
3、配置NI 9512軸
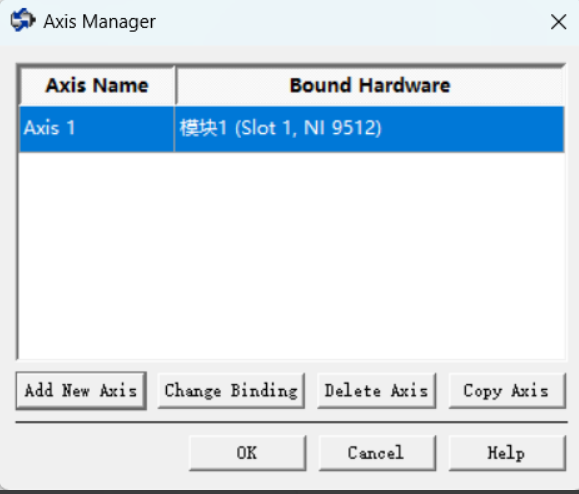
右鍵單擊項(xiàng)目瀏覽器窗口中的終端,從快捷菜單中選擇新建?NI SoftMotion Axis,打開Axis Manager對(duì)話框,單擊Add New Axis。NI 9512自動(dòng)綁定至NI SoftMotion軸。
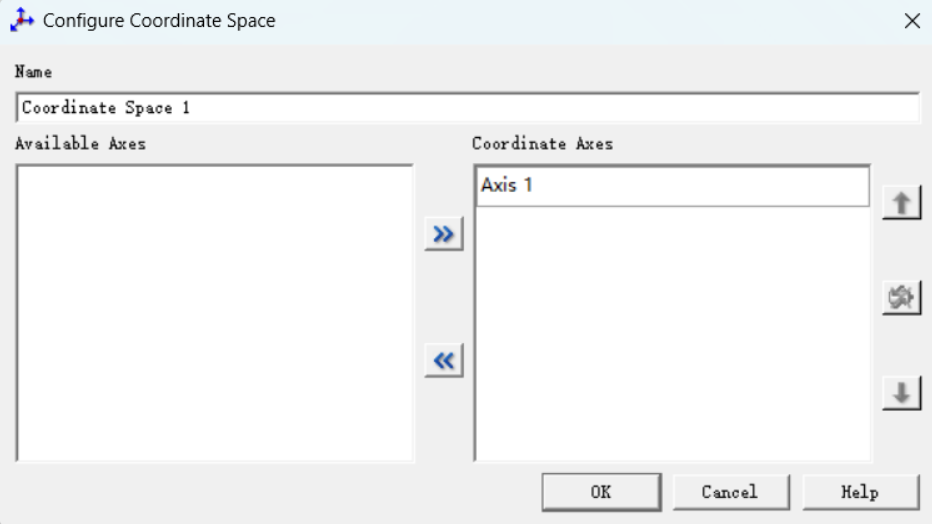
右鍵單擊項(xiàng)目瀏覽器窗口中的終端,從快捷菜單中選擇新建?NI Configure Coordinate Space,打開Configure Coordinate Space對(duì)話框,將Axis 1放入Coordinate Axes。
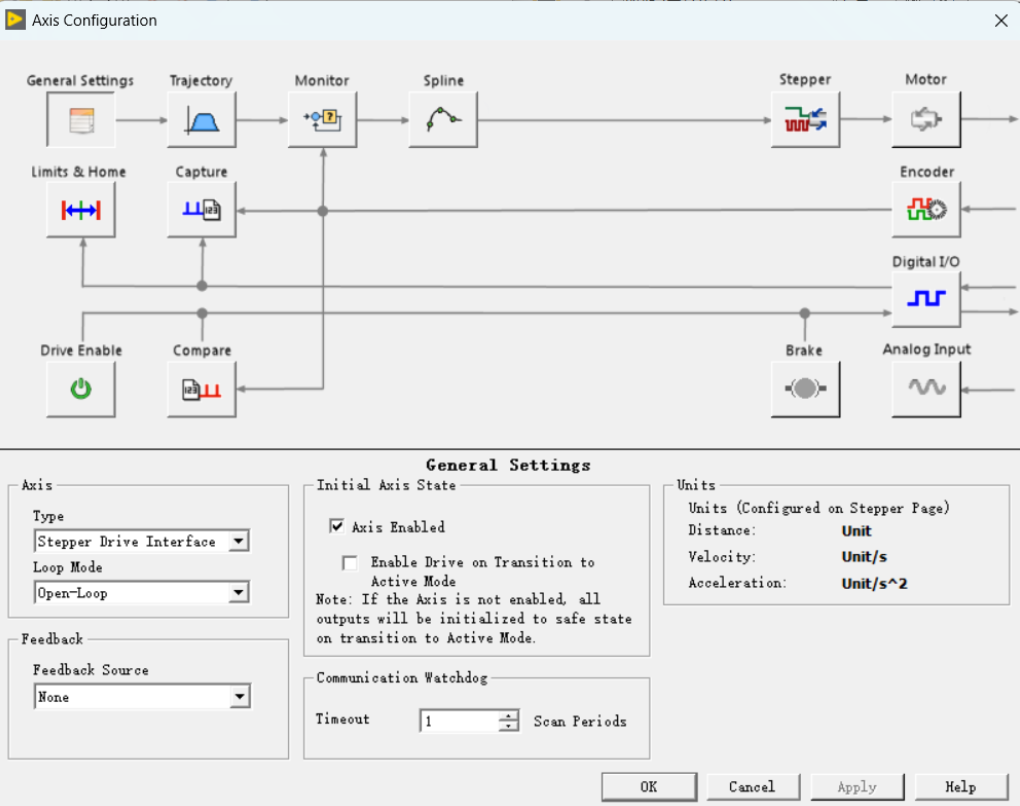
右鍵單擊項(xiàng)目瀏覽器窗口中的軸并從快捷菜單中選擇屬性,打開Axis Configuration 對(duì)話框。
進(jìn)行以下設(shè)置: 在General Settings頁,將Loop Mode設(shè)為Open-Loop。配置為開環(huán)模式的軸生成步進(jìn)輸出。 在General Settings頁,勾選Axis Enabled 和Enable Drive on Transition to Active Mode 復(fù)選框。這些選項(xiàng)在NI掃描引擎切換為“活動(dòng)”模式時(shí),將軸配置為自動(dòng)激活。 在Limits & Home頁,取消勾選Forward Limit和Reverse Limit中的Enable復(fù)選框。
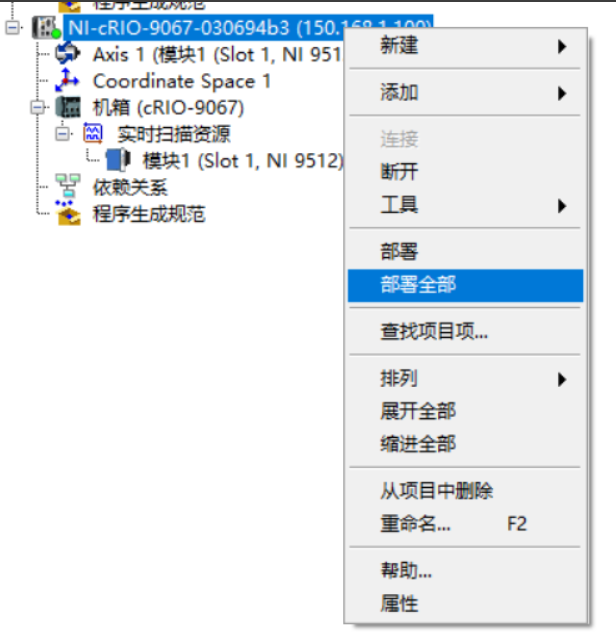
在項(xiàng)目瀏覽器窗口右鍵單擊控制器項(xiàng),并從快捷菜單中選擇部署全部,將軸、坐標(biāo)和軸設(shè)置部署至RT終端。
4、運(yùn)行程序
在項(xiàng)目瀏覽器窗口中右鍵單擊軸,從快捷菜單中選擇Interactive Test Panel。
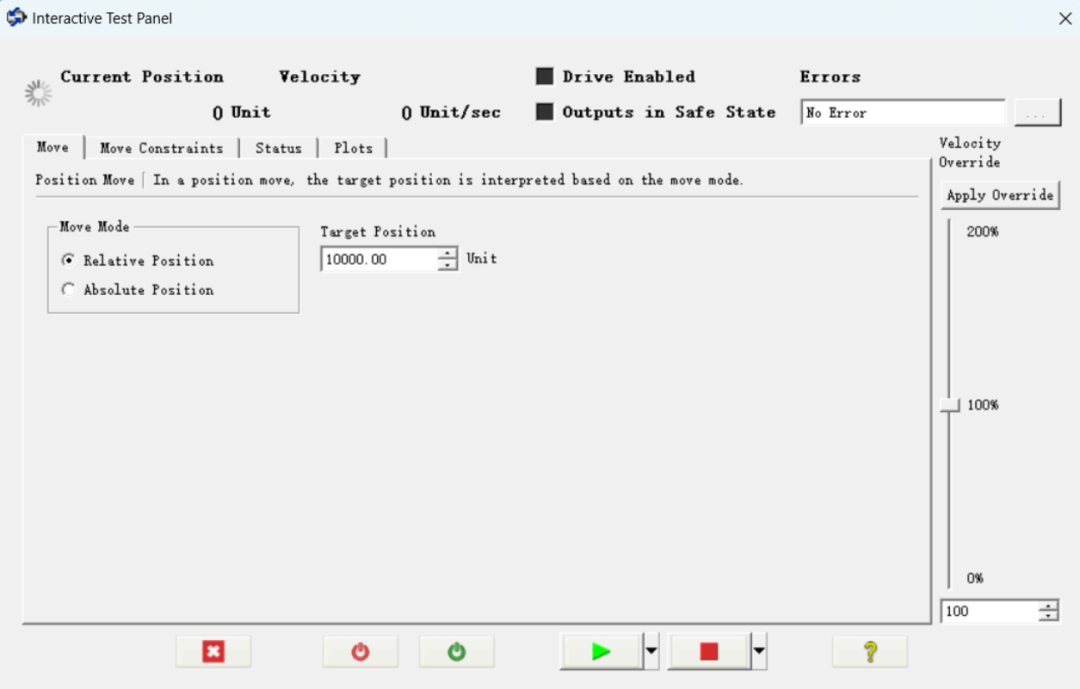
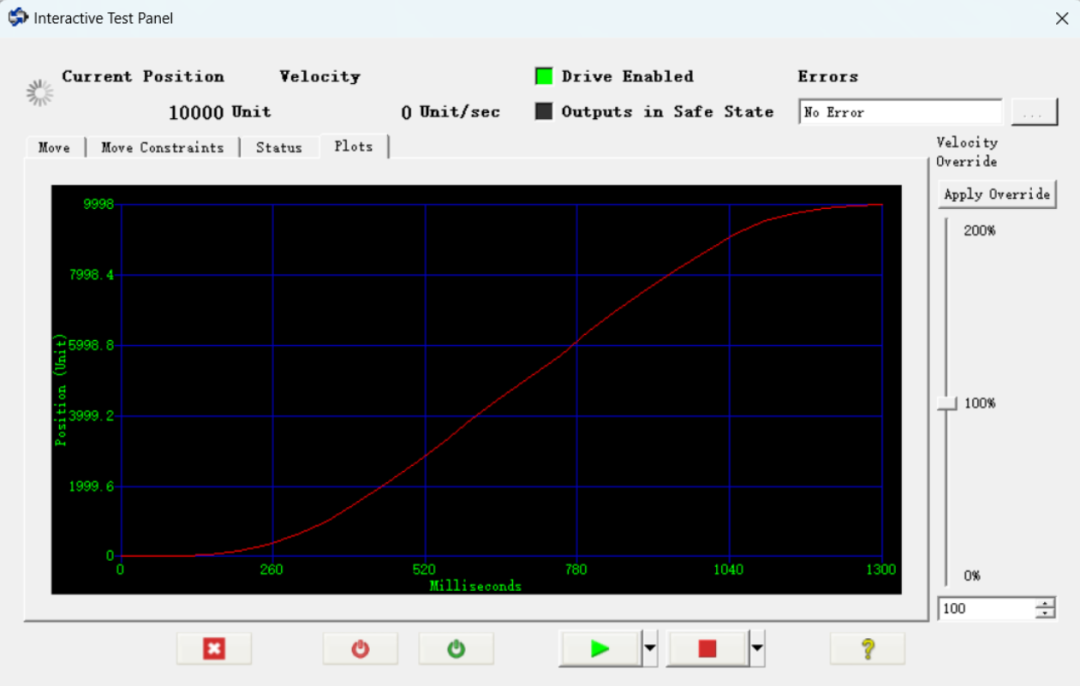
在Move Constraints 選項(xiàng)卡,設(shè)置Velocity、Acceleration/Deceleration 和 Acceleration Jerk/Deceleration Jerk的參數(shù),點(diǎn)擊“運(yùn)行”,將會(huì)自動(dòng)生成步進(jìn)信號(hào),同時(shí)會(huì)在Plots選項(xiàng)卡生成模擬軌跡。該軌跡為步進(jìn)驅(qū)動(dòng)器收到步進(jìn)信號(hào)后理論的軌跡,最終將到達(dá)設(shè)定的目標(biāo)。
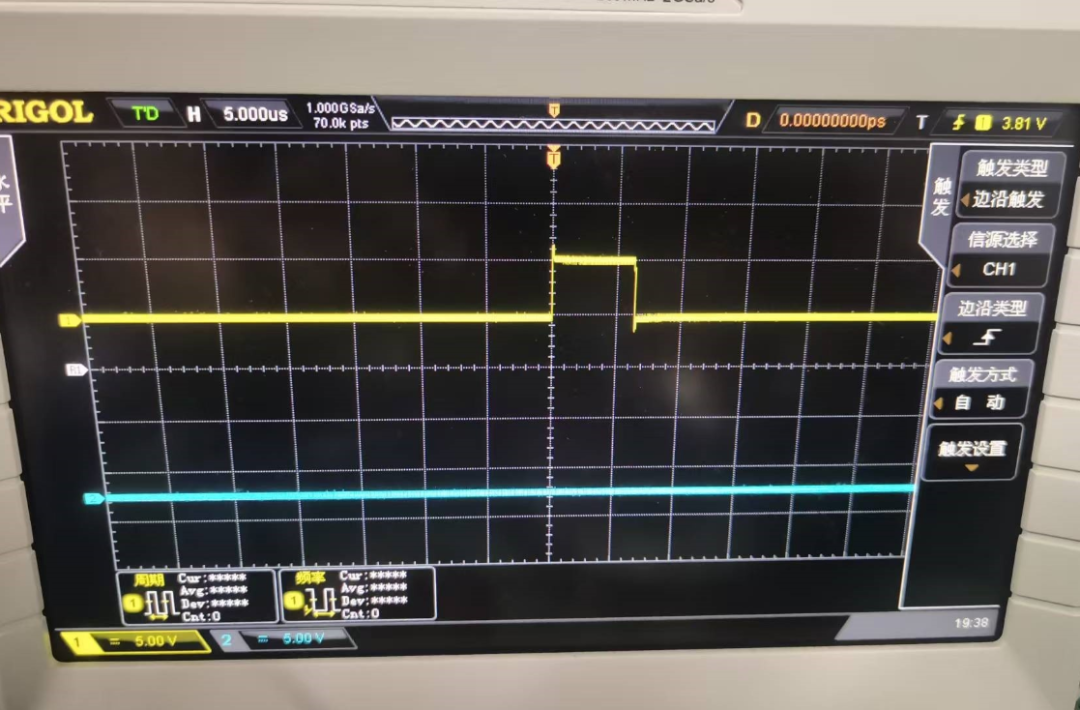
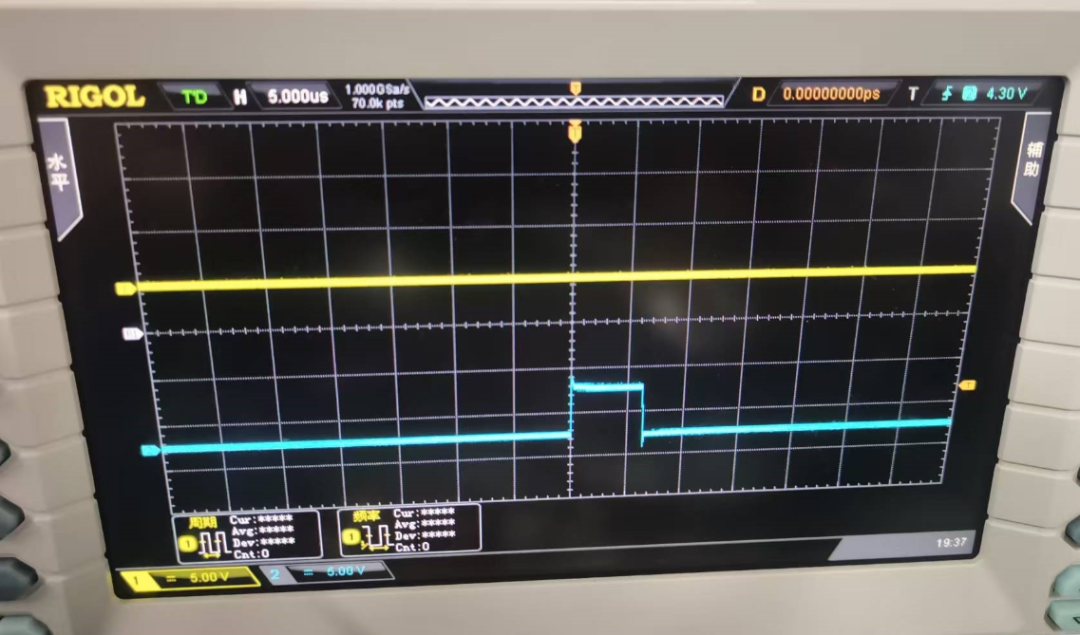
可以在步進(jìn)(CW)與方向(CCW)引腳,根據(jù)設(shè)定的步進(jìn)和方向模式,檢測(cè)到相應(yīng)的步進(jìn)指令信號(hào)。
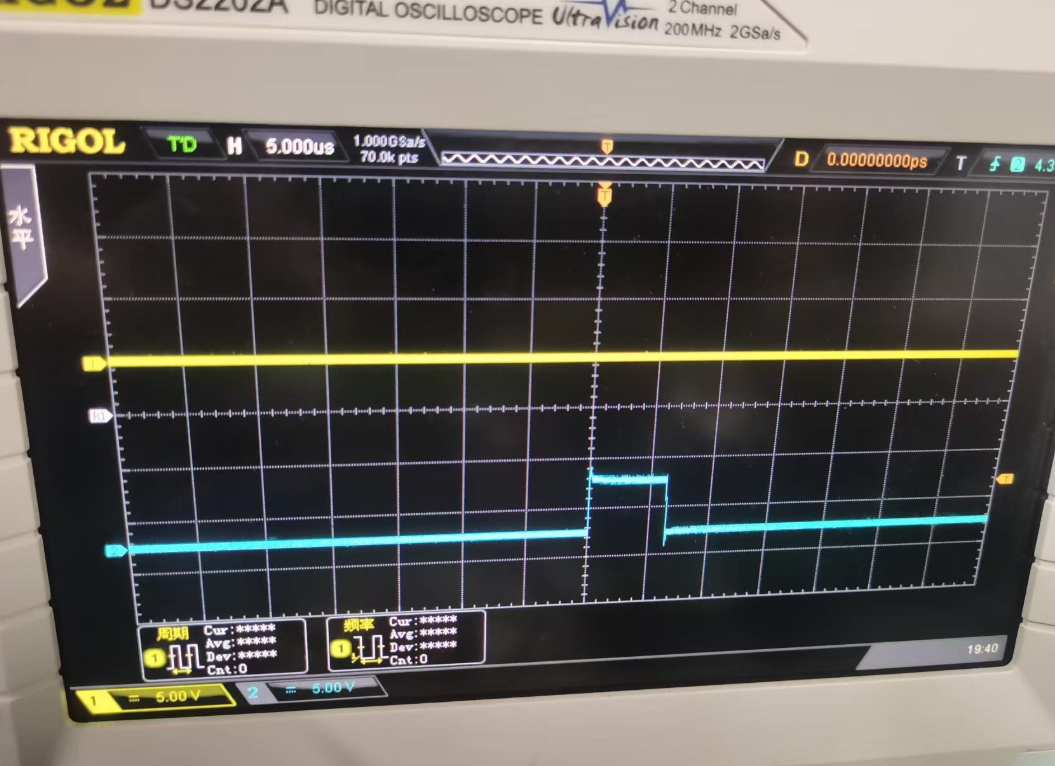
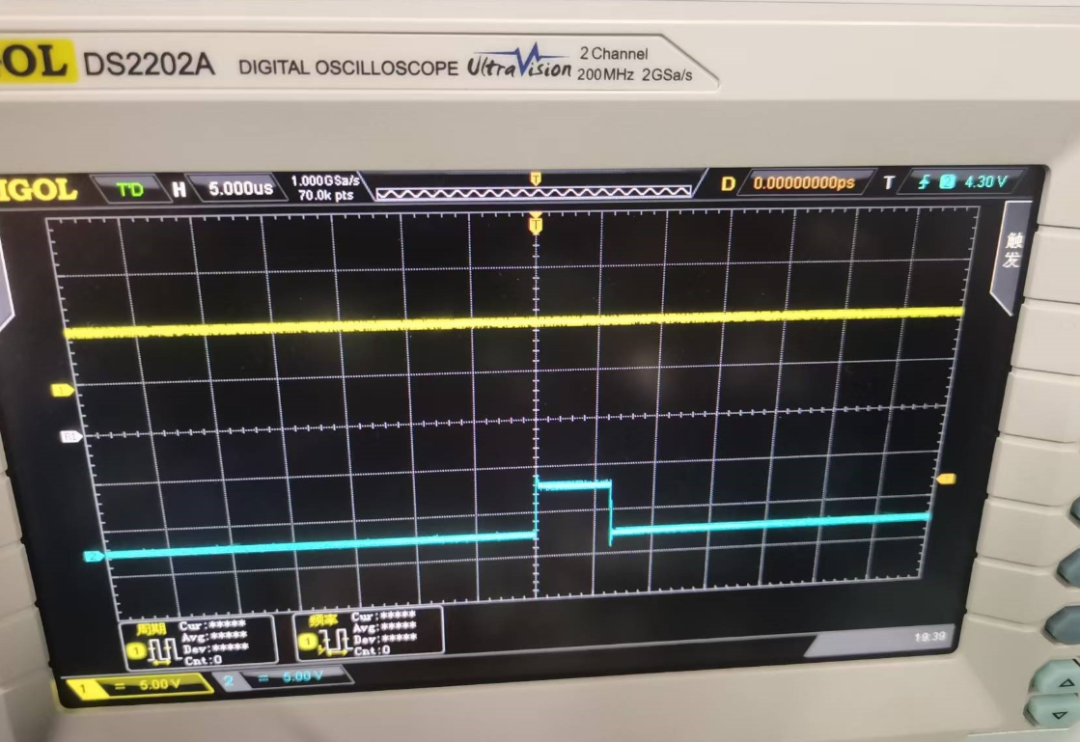
可以在步進(jìn)(CW)與方向(CCW)引腳,根據(jù)設(shè)定的CW和CCW模式,檢測(cè)到相應(yīng)的步進(jìn)指令信號(hào)。
以上就是NI 9512使用教程的全部內(nèi)容啦。歡迎大家留言討論,交流分享!更多關(guān)于測(cè)試系統(tǒng)中的實(shí)際軟硬件應(yīng)用知識(shí),可關(guān)注本公眾號(hào)/下方合集。
更多內(nèi)容,敬請(qǐng)期待!
對(duì)LabVIEW編程技巧和相關(guān)內(nèi)容感興趣的工程師們,歡迎持續(xù)關(guān)注、留言和點(diǎn)贊,也可以私信小編各位的技術(shù)困惑和技術(shù)需求,以獲取參加免費(fèi)線下培訓(xùn)和技術(shù)交流的機(jī)會(huì)哦。
-
模塊
+關(guān)注
關(guān)注
7文章
2844瀏覽量
53384 -
接口
+關(guān)注
關(guān)注
33文章
9558瀏覽量
157384 -
LabVIEW
+關(guān)注
關(guān)注
2018文章
3688瀏覽量
347942 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3260瀏覽量
152612
原文標(biāo)題:知識(shí)分享 | NI 9512使用教程
文章出處:【微信號(hào):華穗科技,微信公眾號(hào):華穗科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
Labview 2013差分信號(hào)輸入配置函數(shù) 研華Labview驅(qū)動(dòng)函數(shù)差分信號(hào)輸入配置
有關(guān)于NI9512控制板卡在Labview上無法找到坐標(biāo)系
使用NI ELVIS、NI LabVIEW和NI Multi
LabVIEW在全自動(dòng)點(diǎn)膠機(jī)中的應(yīng)用
NI發(fā)布AWR設(shè)計(jì)環(huán)境和LabVIEW之間的全新連接
UFSC將LabVIEW和NI CompactDAQ應(yīng)用于車輛通過噪聲測(cè)試的聲學(xué)波束成形中
利用NI LabVIEW創(chuàng)建算法并且解決各類工程問題
在NI VeriStand環(huán)境中進(jìn)行FPGA相關(guān)配置

NI LabVIEW RIO架構(gòu)基礎(chǔ)知識(shí)簡述
NI LabVIEW圖形化開發(fā)環(huán)境與NI硬件平臺(tái),開發(fā)無人駕駛賽車
如何使用Labview通過NI OPC與S7200 PLC通信
如何使用NI LabVIEW和NI Multisim實(shí)現(xiàn)數(shù)字電路和模擬電路的聯(lián)合仿真



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論