") 一種使用Mask Transformer進(jìn)行全景分割的端到端解決方案
一種使用Mask Transformer進(jìn)行全景分割的端到端解決方案

【導(dǎo)讀】近日,谷歌團(tuán)隊(duì)推出了一項(xiàng)新Transformer,可用于優(yōu)化全景分割方案,還登上了CVPR 2022。
最近,谷歌AI團(tuán)隊(duì)受Transformer和DETR的啟發(fā)提出了一種使用Mask Transformer進(jìn)行全景分割的端到端解決方案。
全稱是end-to-end solution for panoptic segmentation with mask transformers,主要用于生成分割MaskTransformer架構(gòu)的擴(kuò)展。
該解決方案采用像素路徑(由卷積神經(jīng)網(wǎng)絡(luò)或視覺Transformer組成)提取像素特征,內(nèi)存路徑(由Transformer解碼器模塊組成)提取內(nèi)存特征,以及雙路徑Transformer用于像素特征和內(nèi)存之間的交互特征。
然而,利用交叉注意力的雙路徑Transformer最初是為語言任務(wù)設(shè)計(jì)的,它的輸入序列由幾百個(gè)單詞構(gòu)成。
而對視覺任務(wù)尤其是分割問題來說,其輸入序列由數(shù)萬個(gè)像素組成,這不僅表明輸入規(guī)模的幅度要大得多,而且與語言單詞相比也代表了較低級別的嵌入。
全景分割是一個(gè)計(jì)算機(jī)視覺問題,它是現(xiàn)在許多應(yīng)用程序的核心任務(wù)。
它分為語義分割和實(shí)例分割兩部分。
語義分割就比如為圖像中的每個(gè)像素分配語義標(biāo)簽,例如「人」和「天空」。
而實(shí)例分割僅識別和分割圖中的可數(shù)對象,如「行人」和「汽車」,并進(jìn)一步將其劃分為幾個(gè)子任務(wù)。
每個(gè)子任務(wù)單獨(dú)處理,并應(yīng)用額外的模塊來合并每個(gè)子任務(wù)階段的結(jié)果。
這個(gè)過程不僅復(fù)雜,而且在處理子任務(wù)和整合不同子任務(wù)結(jié)果時(shí)還會引入許多人工設(shè)計(jì)的先驗(yàn)。
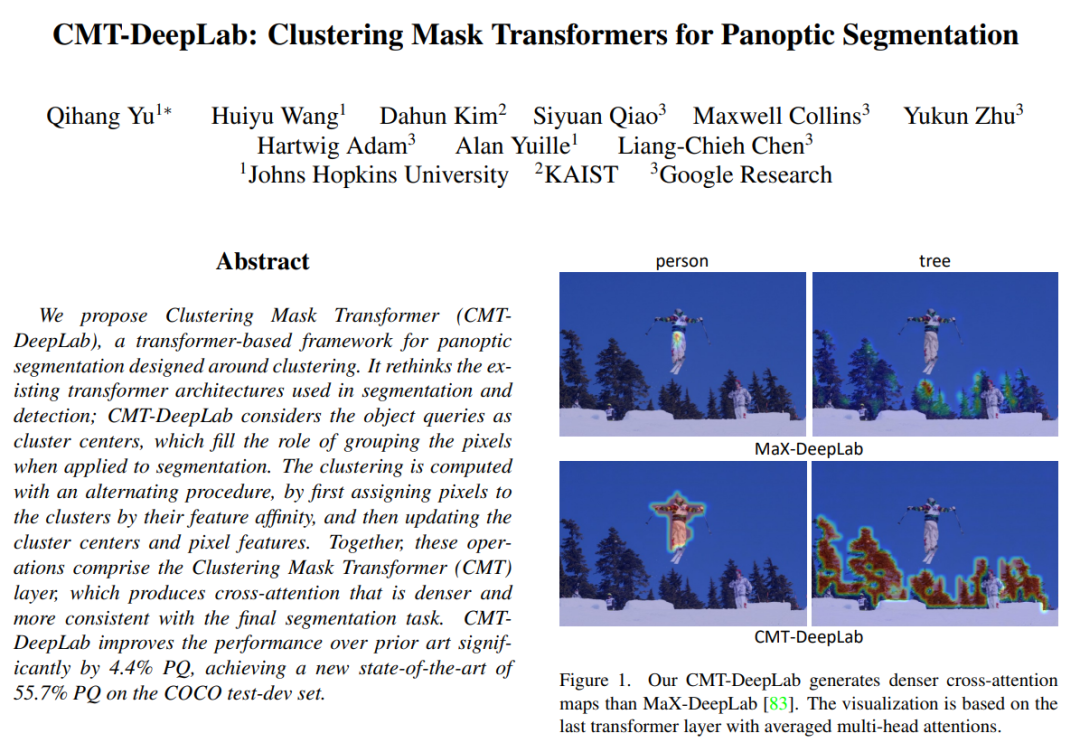
在 CVPR 2022 上發(fā)表的「CMT-DeepLab: Clustering Mask Transformers for Panoptic Segmentation」中,文章提出從聚類的角度重新解讀并且重新設(shè)計(jì)交叉注意力cross attention(也就是將相同語義標(biāo)簽的像素分在同一組),從而更好地適應(yīng)視覺任務(wù)。
CMT-DeepLab 建立在先前最先進(jìn)的方法 MaX-DeepLab 之上,并采用像素聚類方法來執(zhí)行交叉注意,從而產(chǎn)生更密集和合理的注意圖。
kMaX-DeepLab 進(jìn)一步重新設(shè)計(jì)了交叉注意力,使其更像一個(gè) k-means 聚類算法,對激活函數(shù)進(jìn)行了簡單的更改。
結(jié)構(gòu)總覽
研究人員將從聚類的角度進(jìn)行重新解釋,而不是直接將交叉注意力應(yīng)用于視覺任務(wù)而不進(jìn)行修改。
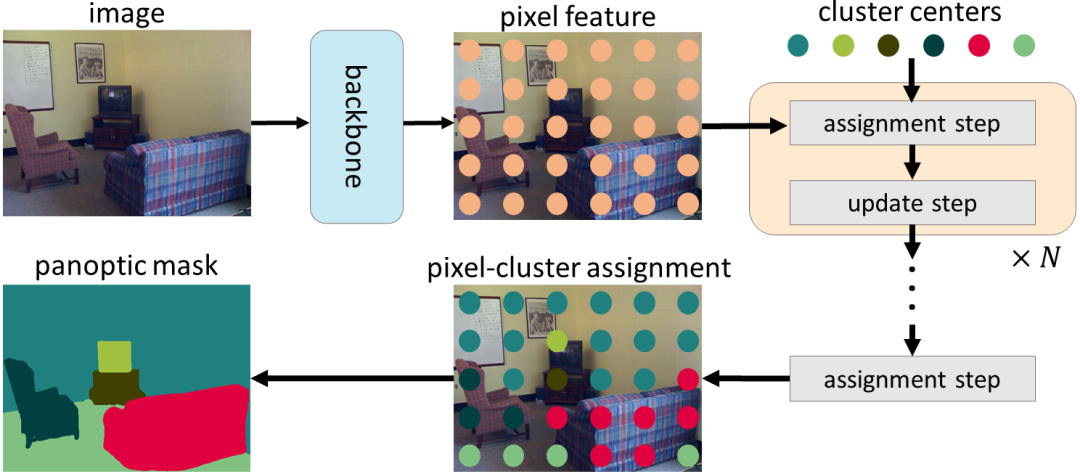
具體來說,他們注意到Mask Transformer 對象查詢可以被認(rèn)為是集群中心(旨在對具有相同語義標(biāo)簽的像素進(jìn)行分組)。
交叉注意力的過程類似于 k-means 聚類算法,(1)將像素分配給聚類中心的迭代過程,其中可以將多個(gè)像素分配給單個(gè)聚類中心,而某些聚類中心可能沒有分配的像素,以及(2)通過平均分配給同一聚類中心的像素來更新聚類中心,如果沒有分配像素,則不會更新聚類中心)。
在CMT-DeepLab和kMaX-DeepLab中,我們從聚類的角度重新制定了交叉注意力,其中包括迭代聚類分配和聚類更新步驟
鑒于 k-means聚類算法的流行,在CMT-DeepLab中,他們重新設(shè)計(jì)了交叉注意力,以便空間方面的softmax操作(即沿圖像空間分辨率應(yīng)用的 softmax 操作),實(shí)際上將聚類中心分配給相反,像素是沿集群中心應(yīng)用的。
在 kMaX-DeepLab 中,我們進(jìn)一步將空間方式的 softmax 簡化為集群方式的 argmax(即沿集群中心應(yīng)用 argmax 操作)。
他們注意到 argmax 操作與 k-means 聚類算法中使用的硬分配(即一個(gè)像素僅分配給一個(gè)簇)相同。
從聚類的角度重新構(gòu)建MaskTransformer的交叉注意力,顯著提高了分割性能,并簡化了復(fù)雜的Masktransformer管道,使其更具可解釋性。
首先,使用編碼器-解碼器結(jié)構(gòu)從輸入圖像中提取像素特征。然后,使用一組聚類中心對像素進(jìn)行分組,這些像素會根據(jù)聚類分配進(jìn)一步更新。最后,迭代執(zhí)行聚類分配和更新步驟,而最后一個(gè)分配可直接用作分割預(yù)測。
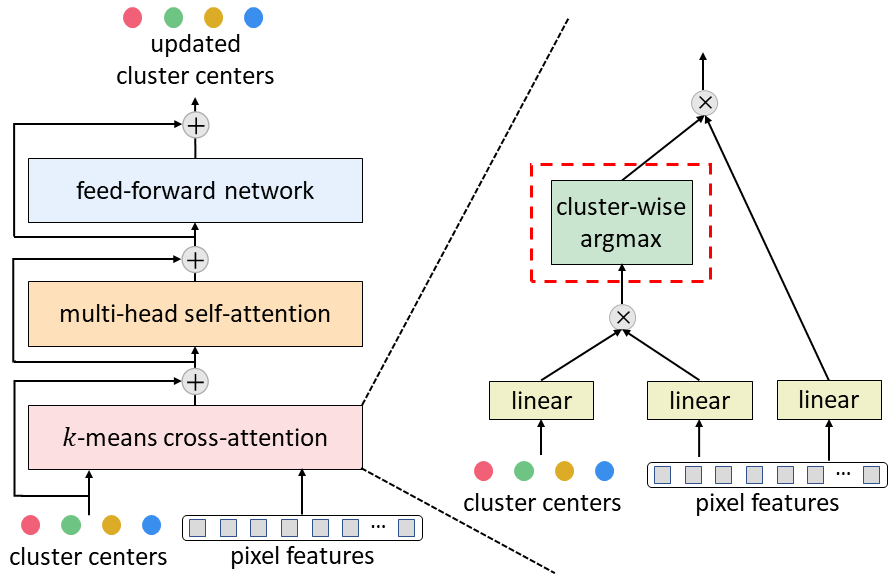
為了將典型的MaskTransformer解碼器(由交叉注意力、多頭自注意力和前饋網(wǎng)絡(luò)組成)轉(zhuǎn)換為上文提出的k-means交叉注意力,只需將空間方式的softmax替換為集群方式最大參數(shù)。
本次提出的 kMaX-DeepLab 的元架構(gòu)由三個(gè)組件組成:像素編碼器、增強(qiáng)像素解碼器和 kMaX 解碼器。
像素編碼器是任何網(wǎng)絡(luò)主干,用于提取圖像特征。
增強(qiáng)的像素解碼器包括用于增強(qiáng)像素特征的Transformer編碼器,以及用于生成更高分辨率特征的上采樣層。
一系列 kMaX 解碼器將集群中心轉(zhuǎn)換為 (1) Mask嵌入向量,其與像素特征相乘以生成預(yù)測Mask,以及 (2) 每個(gè)Mask的類預(yù)測。
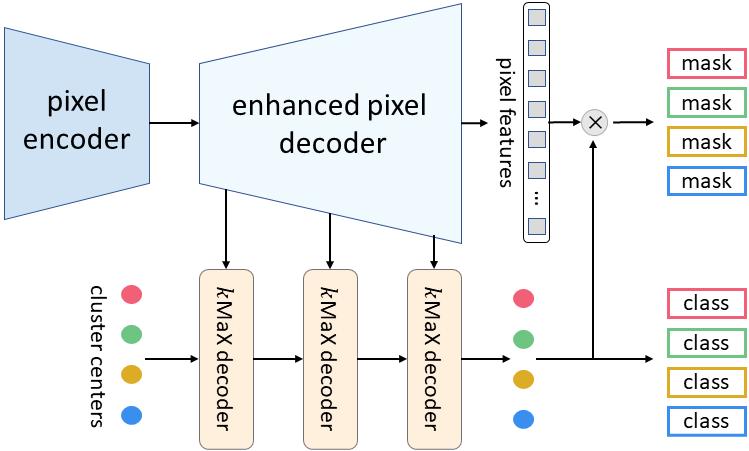
kMaX-DeepLab 的元架構(gòu)
研究結(jié)果
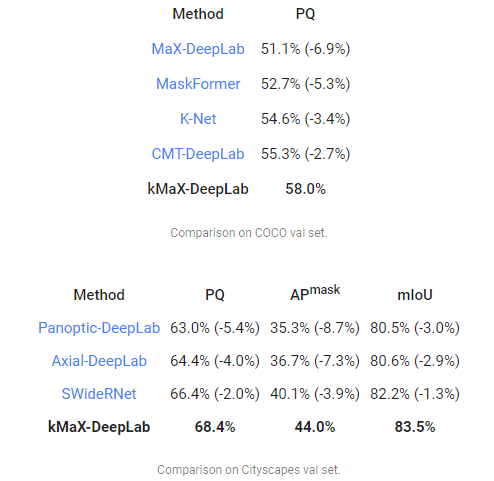
最后,研究小組在兩個(gè)最具挑戰(zhàn)性的全景分割數(shù)據(jù)集 COCO 和 Cityscapes 上使用全景質(zhì)量 (PQ) 度量來評估 CMT-DeepLab 和 kMaX-DeepLab,并對比 MaX-DeepLab 和其他最先進(jìn)的方法。
其中CMT-DeepLab 實(shí)現(xiàn)了顯著的性能提升,而 kMaX-DeepLab 不僅簡化了修改,還進(jìn)一步提升了,COCO val set 上的 PQ 為 58.0%,PQ 為 68.4%,44.0% Mask平均精度(Mask AP),Cityscapes 驗(yàn)證集上的 83.5% 平均交集比聯(lián)合(mIoU),沒有測試時(shí)間增強(qiáng)或使用外部數(shù)據(jù)集。
從聚類的角度設(shè)計(jì),kMaX-DeepLab 不僅具有更高的性能,而且還可以更合理地可視化注意力圖以了解其工作機(jī)制。
在下面的示例中,kMaX-DeepLab 迭代地執(zhí)行聚類分配和更新,從而逐漸提高M(jìn)ask質(zhì)量。
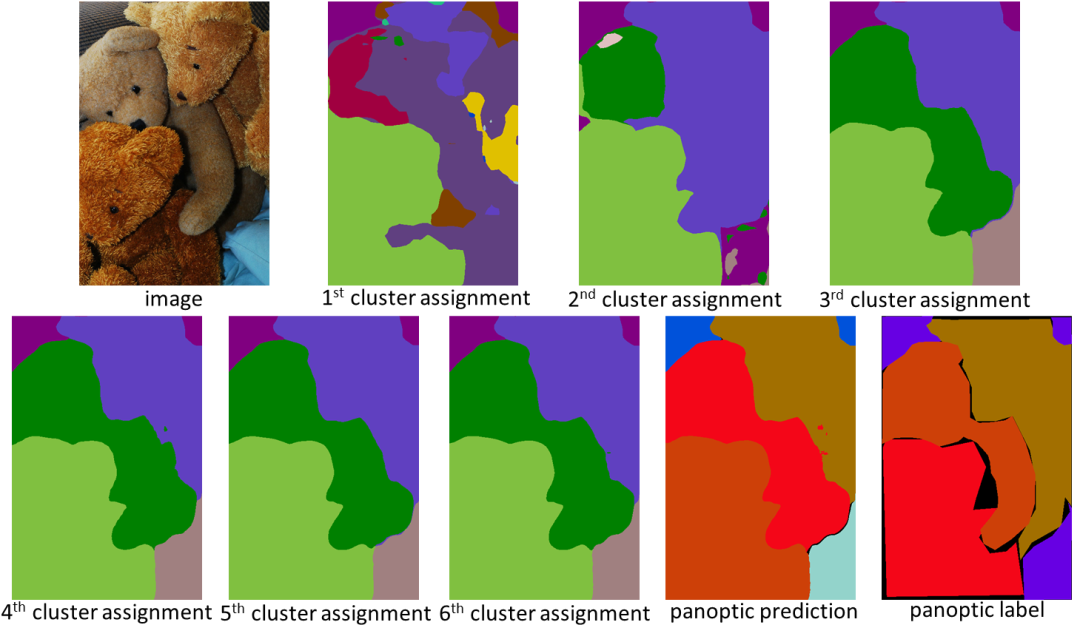
kMaX-DeepLab 的注意力圖可以直接可視化為全景分割,讓模型工作機(jī)制更合理
結(jié)論
本次研究展示了一種更好地設(shè)計(jì)視覺任務(wù)中的MaskTransformer的方法。
通過簡單的修改,CMT-DeepLab 和 kMaX-DeepLab 重新構(gòu)建了交叉注意力,使其更像一種聚類算法。
因此,所提出的模型在COCO 和 Cityscapes數(shù)據(jù)集上實(shí)現(xiàn)了最先進(jìn)的性能。
研究團(tuán)隊(duì)表示,他們希望 DeepLab2 庫中 kMaX-DeepLab 的開源版本有助于未來對專用于視覺Transformer架構(gòu)設(shè)計(jì)的研究。
審核編輯 :李倩
-
解碼器
+關(guān)注
關(guān)注
9文章
1219瀏覽量
43413 -
圖像
+關(guān)注
關(guān)注
2文章
1096瀏覽量
42329 -
計(jì)算機(jī)視覺
+關(guān)注
關(guān)注
9文章
1715瀏覽量
47630
原文標(biāo)題:谷歌團(tuán)隊(duì)推出新Transformer,優(yōu)化全景分割方案|CVPR 2022
文章出處:【微信號:CVSCHOOL,微信公眾號:OpenCV學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
端到端自動駕駛仿真新范式:aiSim如何解決智駕測試的"災(zāi)難性挑戰(zhàn)"

如何訓(xùn)練好自動駕駛端到端模型?

端到端智駕模擬軟件推薦——為什么選擇Keymotek的aiSim?
Nullmax端到端軌跡規(guī)劃論文入選AAAI 2026
自動駕駛中端到端仿真與基于規(guī)則的仿真有什么區(qū)別?
自動駕駛中“一段式端到端”和“二段式端到端”有什么區(qū)別?

自動駕駛中常提的一段式(單段)端到端是個(gè)啥?
解決方案 | 云管端一體化OTA HIL測試解決方案

自主工具鏈助力端到端組合輔助駕駛算法驗(yàn)證

Transformer在端到端自動駕駛架構(gòu)中是何定位?
Nullmax端到端自動駕駛最新研究成果入選ICCV 2025

端到端數(shù)據(jù)標(biāo)注方案在自動駕駛領(lǐng)域的應(yīng)用優(yōu)勢
一文帶你厘清自動駕駛端到端架構(gòu)差異

Elektrobit 將于2025上海車展展示云端至車端的軟件定義汽車創(chuàng)新解決方案
小米汽車端到端智駕技術(shù)介紹




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論