") 歐卡智舶發(fā)布全球首個(gè)城市內(nèi)河無(wú)人駕駛數(shù)據(jù)集
歐卡智舶發(fā)布全球首個(gè)城市內(nèi)河無(wú)人駕駛數(shù)據(jù)集

歐卡智舶技術(shù)專(zhuān)題發(fā)布
最近,歐卡智舶聯(lián)合清華大學(xué)與西北工業(yè)大學(xué)的研究學(xué)者公開(kāi)了一個(gè)針對(duì)真實(shí)內(nèi)河水域場(chǎng)景下多傳感器、多天氣條件下的內(nèi)河無(wú)人船數(shù)據(jù)集USVlnland 。為無(wú)人船及水面自動(dòng)駕駛領(lǐng)域相關(guān)研究者提供一個(gè)平臺(tái)和基準(zhǔn),推動(dòng)解決內(nèi)河無(wú)人船在真實(shí)場(chǎng)景應(yīng)用中面臨的挑戰(zhàn)。
近年來(lái),內(nèi)河無(wú)人船因其潛在的應(yīng)用價(jià)值而受到廣泛關(guān)注,不同于海面無(wú)人船和路面自動(dòng)駕駛場(chǎng)景,內(nèi)河行駛的無(wú)人船的定位和感知面臨著獨(dú)特的挑戰(zhàn)。歐卡智舶聯(lián)合清華大學(xué)與西北工業(yè)大學(xué)的研究學(xué)者于近日公開(kāi)了USVInland數(shù)據(jù)集,該數(shù)據(jù)集是第一個(gè)內(nèi)河場(chǎng)景下多傳感器的無(wú)人船數(shù)據(jù)集,旨在促進(jìn)無(wú)人船領(lǐng)域相關(guān)研究,數(shù)據(jù)集論文已經(jīng)被IEEE Robotics and Automation Letters (RA-L) 接收,并將在IEEE International Conference on Robotics and Automation (ICRA) 2021上進(jìn)行展示。
背景介紹隨著自動(dòng)駕駛技術(shù)的發(fā)展,自動(dòng)駕駛場(chǎng)景逐漸由路面擴(kuò)展至水上,無(wú)人船(Unmanned Surface Vehicle,USV)及其相關(guān)應(yīng)用成為近年來(lái)研究熱點(diǎn)之一。其中,內(nèi)河無(wú)人船具有極大的應(yīng)用價(jià)值,如內(nèi)河自主運(yùn)輸,測(cè)繪,水質(zhì)檢測(cè),和河道垃圾清理等。不同于海面無(wú)人船,內(nèi)河相對(duì)狹窄和復(fù)雜的環(huán)境,對(duì)無(wú)人船的定位和感知帶來(lái)了新的挑戰(zhàn)。
在狹窄的內(nèi)陸水道中,GPS信號(hào)有時(shí)會(huì)由于河岸植被、河道旁建筑以及橋梁的遮擋而減弱。在這種情況下,內(nèi)河航道的準(zhǔn)確定位與導(dǎo)航,依賴(lài)于對(duì)無(wú)人船與周?chē)h(huán)境的感知。此外,內(nèi)河場(chǎng)景更為復(fù)雜,必須確保無(wú)人船與河岸和其他障礙物保持安全距離。因此,與道路上的自動(dòng)駕駛類(lèi)似,基于激光雷達(dá)、相機(jī)和毫米波雷達(dá)等傳感器的同步定位與建圖(SLAM)、立體匹配和水岸分割等任務(wù)被引入到內(nèi)河無(wú)人船的應(yīng)用中。
而在內(nèi)河中,水面上的霧和強(qiáng)光反射會(huì)降低激光雷達(dá)探測(cè)精度;對(duì)于視覺(jué)系統(tǒng),水面霧氣和強(qiáng)光反射,岸邊物體的反射和雨滴引起的漣漪也會(huì)帶來(lái)干擾。此外,不同于路面車(chē)輛,水面上船只的橫向漂移較大,船只的運(yùn)動(dòng)模型更為復(fù)雜,給精確定位帶來(lái)新的挑戰(zhàn)。因此,對(duì)于內(nèi)河無(wú)人船,路面自動(dòng)駕駛的通用策略是不可行的。 在路面自動(dòng)駕駛領(lǐng)域,近年來(lái)涌現(xiàn)出了如KITTI,Oxford RobotCar,nuScenes等公共數(shù)據(jù)集,大大促進(jìn)了路面自動(dòng)駕駛領(lǐng)域相關(guān)技術(shù)的發(fā)展。而無(wú)人船領(lǐng)域的公開(kāi)標(biāo)準(zhǔn)數(shù)據(jù)目前還相對(duì)缺失。 數(shù)據(jù)集介紹USVInland是第一個(gè)真實(shí)場(chǎng)景下多傳感器、多天氣條件下的內(nèi)河無(wú)人船數(shù)據(jù)集。在不同的內(nèi)陸河道場(chǎng)景中,共采集了27段原始數(shù)據(jù),總行駛距離超過(guò)26公里,發(fā)布的數(shù)據(jù)中包含了SLAM、立體匹配和水岸分割三項(xiàng)任務(wù)。
數(shù)據(jù)采集平臺(tái)搭載的傳感器包括激光雷達(dá),雙目相機(jī),以及GPS和IMU幾種自動(dòng)駕駛領(lǐng)域常用傳感器。除此以外,采集平臺(tái)上還配備了三個(gè)毫米波雷達(dá)提供周?chē)h(huán)境點(diǎn)云數(shù)據(jù)。與圖像和激光雷達(dá)相比,毫米波雷達(dá)對(duì)天氣以及光照條件的魯棒性更強(qiáng),能提供多普勒速度信息,且成本較低,近年來(lái)在自動(dòng)駕駛領(lǐng)域應(yīng)用廣泛。不同傳感器之間完成了時(shí)間同步和空間標(biāo)定。
受KITTI的啟發(fā),USVInland數(shù)據(jù)集引入了SLAM、立體匹配和水岸分割任務(wù)。對(duì)已有的常用算法,如SLAM中的LOAM,Lego-LOAM,ORB-SLAM,立體匹配中的SGBM,以及用于水岸分割的語(yǔ)義分割網(wǎng)絡(luò)DeepLab v3+,文中給出了在內(nèi)河場(chǎng)景數(shù)據(jù)集上的實(shí)驗(yàn)結(jié)果。結(jié)果表明,受到內(nèi)河特殊場(chǎng)景的影響,常用算法的性能無(wú)法滿(mǎn)足內(nèi)河無(wú)人船安全行駛的需求。
總結(jié)針對(duì)內(nèi)河無(wú)人船實(shí)際應(yīng)用的需求,研究者構(gòu)建了第一個(gè)多傳感器、真實(shí)場(chǎng)景下內(nèi)河無(wú)人船數(shù)據(jù)集USVInland。期待通過(guò)該數(shù)據(jù)集的發(fā)布,為無(wú)人船及水面自動(dòng)駕駛領(lǐng)域相關(guān)研究者提供一個(gè)平臺(tái)和基準(zhǔn),推動(dòng)解決內(nèi)河無(wú)人船在真實(shí)場(chǎng)景應(yīng)用中面臨的挑戰(zhàn)。USVlnland主要被設(shè)計(jì)用于提升無(wú)人船在真實(shí)內(nèi)河水域場(chǎng)景下的各項(xiàng)作業(yè)能力,USVlnland也是國(guó)內(nèi)首個(gè)內(nèi)河水面無(wú)人駕駛數(shù)據(jù)集,對(duì)于國(guó)內(nèi)內(nèi)河水面無(wú)人駕駛技術(shù)的發(fā)展具有劃時(shí)代的意義。現(xiàn)在,歐卡智舶已經(jīng)把 USVlnland數(shù)據(jù)集免費(fèi)開(kāi)放給全球各個(gè)國(guó)家的技術(shù)研究者使用,期待 USVlnland 能夠啟發(fā)更多研究人員進(jìn)行真實(shí)內(nèi)河水域場(chǎng)景下無(wú)人船發(fā)展的研究。
原文標(biāo)題:行業(yè)動(dòng)態(tài) || 重磅!歐卡智舶發(fā)布全球首個(gè)城市內(nèi)河無(wú)人駕駛數(shù)據(jù)集
文章出處:【微信公眾號(hào):機(jī)器人夢(mèng)工廠】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
傳感器
+關(guān)注
關(guān)注
2576文章
55035瀏覽量
791269 -
無(wú)人駕駛
+關(guān)注
關(guān)注
100文章
4297瀏覽量
126812
原文標(biāo)題:行業(yè)動(dòng)態(tài) || 重磅!歐卡智舶發(fā)布全球首個(gè)城市內(nèi)河無(wú)人駕駛數(shù)據(jù)集
文章出處:【微信號(hào):Xbotpark,微信公眾號(hào):機(jī)器人夢(mèng)工廠】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
西井科技無(wú)人駕駛重載水平運(yùn)輸車(chē)Q-Chassis交付廣州南沙碼頭
百度蘿卜快跑獲得迪拜全無(wú)人駕駛測(cè)試許可
佑駕創(chuàng)新助力低速無(wú)人駕駛行業(yè)高質(zhì)量發(fā)展
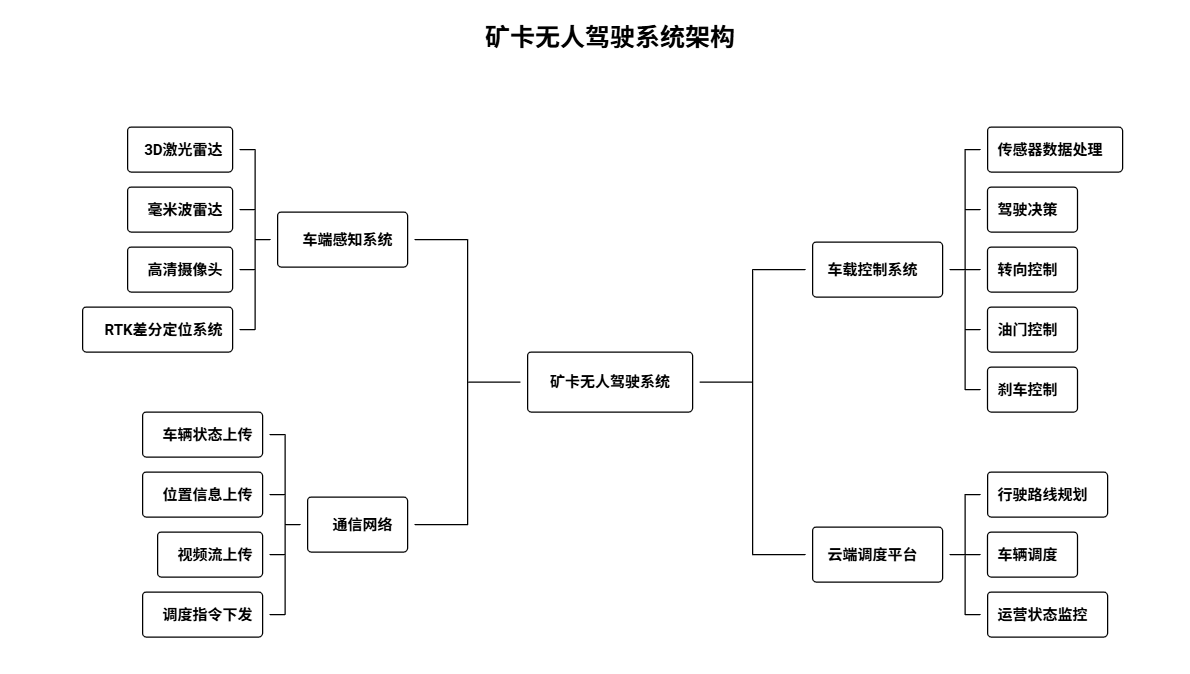
礦卡無(wú)人駕駛從理論到落地的全過(guò)程記錄(轉(zhuǎn)載)
西井科技無(wú)人駕駛集卡全球項(xiàng)目再進(jìn)階
西井科技無(wú)人駕駛新能源集卡落地四川瀘州港
無(wú)人駕駛:智能決策與精準(zhǔn)執(zhí)行的融合
城市內(nèi)河水位監(jiān)測(cè)與閘門(mén)控制系統(tǒng)解決方案
主線(xiàn)科技無(wú)人駕駛集卡助力中越智慧口岸建設(shè)
智行者科技無(wú)人駕駛小巴落地海南

什么是低速無(wú)人駕駛,讓你一分鐘秒懂 #無(wú)人駕駛 #5g無(wú)人駕駛 #低速無(wú)人駕駛
無(wú)人駕駛技術(shù)未來(lái)在哪里?低速才是突破口

內(nèi)蒙古首個(gè)超百臺(tái)增程式無(wú)人駕駛礦卡項(xiàng)目落地
東風(fēng)無(wú)人集卡助力陽(yáng)邏港轉(zhuǎn)型升級(jí)
城市內(nèi)河水質(zhì)監(jiān)測(cè)物聯(lián)網(wǎng)系統(tǒng)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論