 基于Wild Thumper的ROS機器人設計
基于Wild Thumper的ROS機器人設計

我之前已經建造了一些機器人,但從未能夠使用它們進行真正的導航,例如成功地從客廳駕駛到廚房。原因是一些紅外和聲納傳感器不足以進行“真實”導航。您可以避免遇到障礙,但不能超過其他。直到幾年前我通過rviz GUI發現ROS(機器人操作系統)后,我的軟件才更適合于此。由于具備ROS的現成機器人有些昂貴,因此我決定圍繞Wild Thumper 4wd底盤建造一個新機器人。幾周內,硬件和電子設備幾乎完成。從那時起,我花了一些時間進行調整。目標是能夠通過SLAM(同時進行定位和地圖繪制)在室內導航,并使用GPS在室外進行導航。背面的自由空間應該在將來某個地方承載機械臂。
細節 :
機械:Wild Thumper 4WD底盤 電機升級編碼器 總重量:3.3公斤
電源:電池:2x 7.2V NiMh,融合30A(慢速) 通過穩壓器D24V50F5(5A)提供5V,與3A融合(快速) 兩個電池分別使用LM5050-2有源或電路并聯連接。另一個LM5050-2可以并聯連接,用于擴展塢電源。
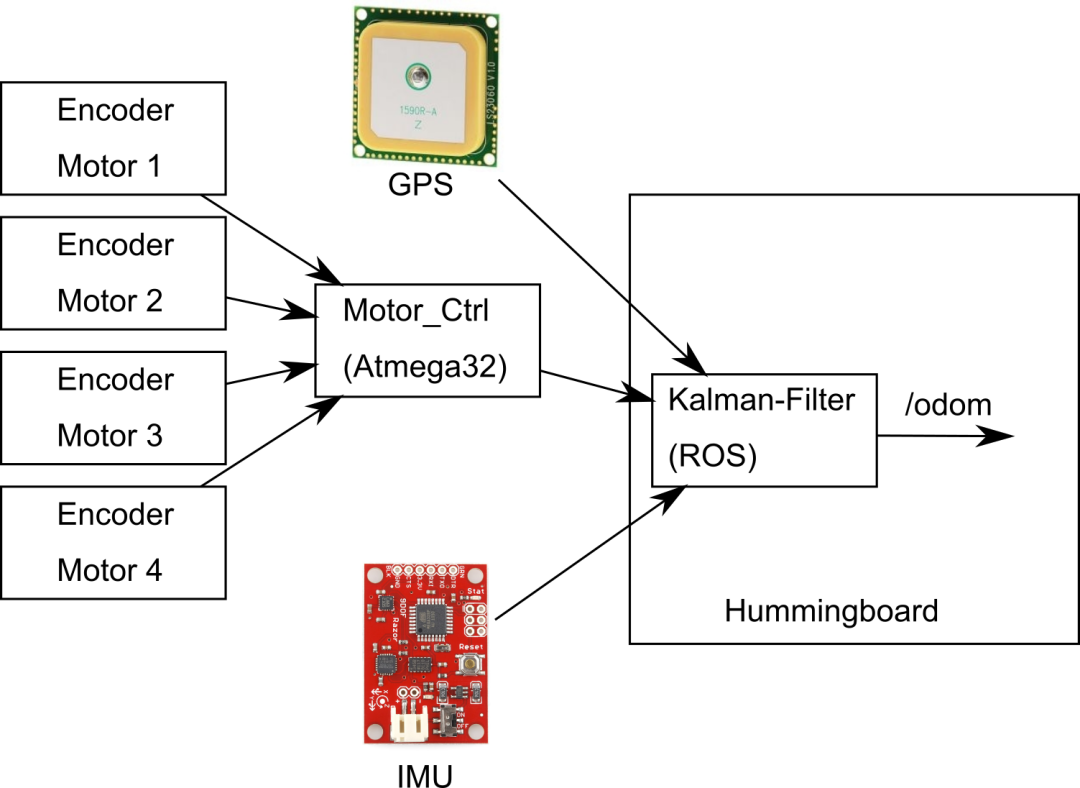
電腦:固態運行悍馬板(i.MX6 ARM Cortex-A9雙核1GHz,2GB RAM) AVR Atmega32用于電機控制 用于I / O的AVR Atmega328(Arduino Nano)
外圍設備:悍馬板:GPS(uart),IMU(USB),3D攝像頭(USB),通過I2C的2xAVR,PCA9517“電平轉換I2C總線中繼器”,以將3.3V與5V I2C橋接。
電機控制:
電機由4個VNH2SP30驅動,在20kHz PWM上各一個 車輪編碼器的速度控制(PID)和里程表在Atmega328上計算。
Atmega328上的輸入/輸出:
3個聲納傳感器,2個紅外距離傳感器,電池電壓
里程表計算:
使用Tinkerforge IMU Brick 2.0和Kalman濾波校正的車輪里程表
傳感器:
Xtion Pro實時深度相機
2個IR 2D120X(左1個,右1個)
3個聲納SRF05(2個前置,1個后置)
聲納傳感器的目的是在不到0.5m的距離內校正深度攝像機的死區
軟件:
Debian拉伸
機器人操作系統(ROS)動力學
對象如下:
借助超寬帶(UWB)模塊,機器人可以跟隨目標,在下面的視頻中,它是遙控車:
GPS測試視頻:
以下視頻顯示了機器人通過四個GPS航路點自動駕駛廣場的過程。前置攝像頭顯示在左下方,rviz地圖視頻顯示在左上方。
責任編輯:xj
原文標題:基于Wild Thumper的ROS機器人,室外導航,走起~
文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
導航
+關注
關注
7文章
577瀏覽量
43914 -
ROS
+關注
關注
1文章
293瀏覽量
18722
原文標題:基于Wild Thumper的ROS機器人,室外導航,走起~
文章出處:【微信號:cirmall,微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于3D視覺引導的移動式復合機器人設計:智能自動化革命的核心技術

米爾RK3576成功上車!ROS2 Humble生態系統體驗
當國產芯遇上機器人:RK3576的ROS2奇幻之旅

EtherCAT主站協議棧EC-Master在ROS(機器人操作系統)中的應用

探索RISC-V在機器人領域的潛力
NVIDIA助力新一代機器人開發開源框架
恩智浦自主移動機器人設計要點

如何基于翼輝信息SylixOS開發ROS 2應用

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
做ros0小車仿真實驗室stp 文件免費獲取方法
工業機器人設計工程師必備指南免費下載



 工商網監
工商網監
評論