 當國產芯遇上機器人:RK3576的ROS2奇幻之旅
當國產芯遇上機器人:RK3576的ROS2奇幻之旅

當RK3576的強勁“大腦”(四核A72+四核A53)與強大的GPU、VPU、NPU加速模塊相遇,一場高性價比的機器人開發革命正在悄然發生。我們成功將完整的Ubuntu 22.04與ROS2 Humble生態系統,完美移植到了這顆國產芯片上。一個穩定、全功能的機器人軟件開發平臺已經就緒,現在就來一起探索它的強大魅力!
一、系統啟動與基礎性能展示
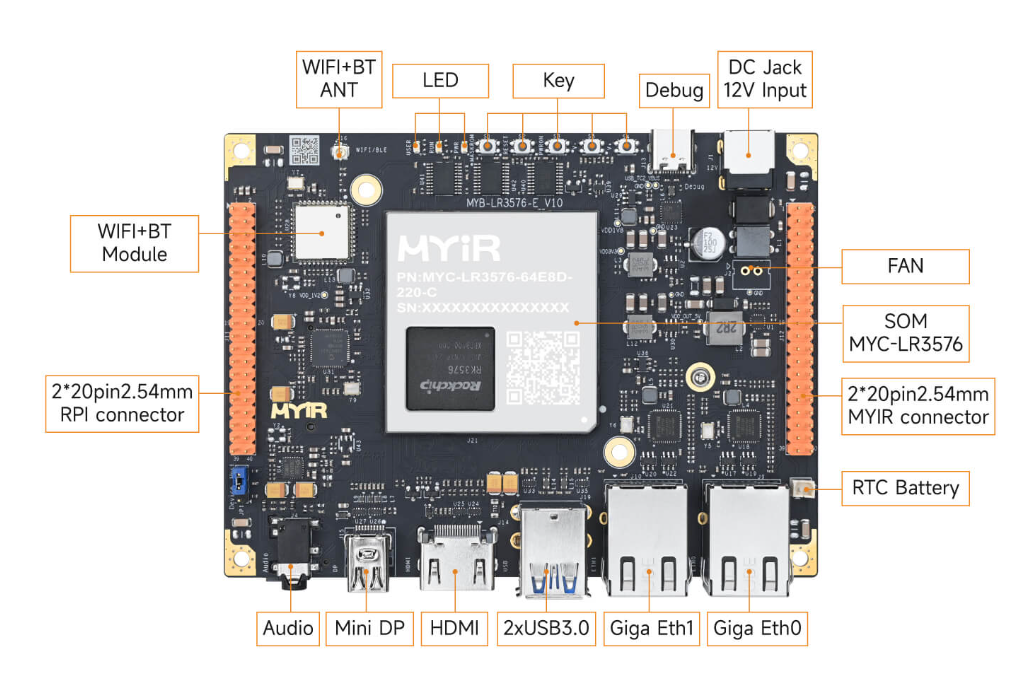
1.硬件平臺簡介
開發板:MYD-LR3576
存儲:eMMC 64GB
內存:8GB LPDDR4
登錄信息:root/123456或myir/123456
2.系統基本信息
版本:Ubuntu 22.04.5 LTS
啟動速度:HDMI 3秒顯示Logo,25秒進入桌面
3.資源占用實測
磁盤使用情況
:
Filesystem Size Used Avail Use% Mountedon/dev/root 57G 13G 42G 23% /
內存狀態:
Mem: 7.7Gi total,760Mi used,6.4Gi free
CPU負載情況:
8核CPU在空閑狀態下利用率接近0%,系統響應迅速。
4.桌面環境展示
默認搭載輕量級Xfce4桌面,簡潔流暢。
5.系統功能介紹
功能 | 描述 | 支持情況 |
調試工具 | Debug串口、adb、ssh | 完全支持 |
瀏覽器 | 支持GPU/VPU硬件加速 | 默認支持 |
網絡連接 | 桌面可控 | |
多媒體 | VPU硬解視頻播放 | 流暢支持 |
AI能力 | NPU推理,支持RKNN模型 | 默認支持 |
容器化 | Docker引擎 | 開箱即用 |
二、ROS2核心功能測試
1.
環境驗證
ROS_VERSION=2ROS_DISTRO=humbleROS_PYTHON_VERSION=3
確認運行ROS2 Humble長期支持版,生態完整。
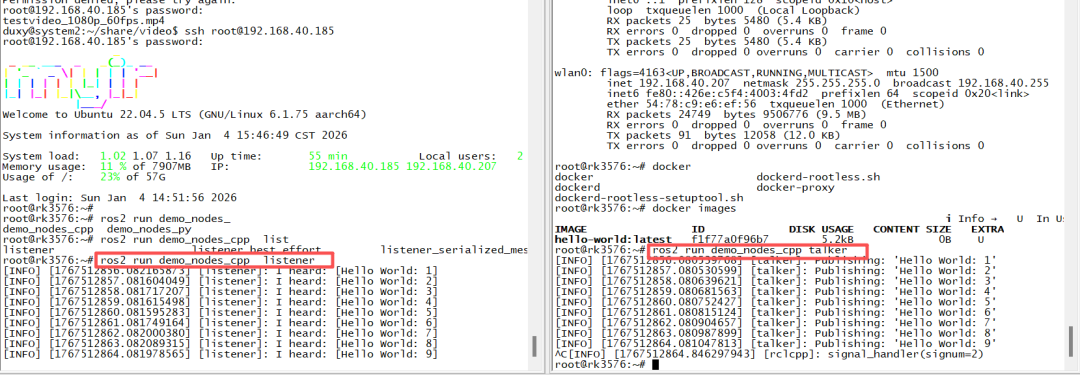
2.通信測試
話題發布/訂閱:C++與Python節點通信正常,跨終端交互流暢。
使用C++演示
左邊窗口ssh登錄,訂閱模式; 右邊窗口debug連接,話題發布
使用Python演示

3.性能表現
root@rk3576:~# ros2 topic hz /chatteraveragerate:1.001 min:0.999s max:0.999s std dev:0.00018s window:3averagerate:1.001 min:0.999s max:1.000s std dev:0.00021s window:5averagerate:1.001 min:0.999s max:1.000s std dev:0.00021s window:7averagerate:1.001 min:0.999s max:1.000s std dev:0.00027s window:9averagerate:1.001 min:0.999s max:1.000s std dev:0.00029s window:11averagerate:1.001 min:0.999s max:1.000s std dev:0.00029s window:13
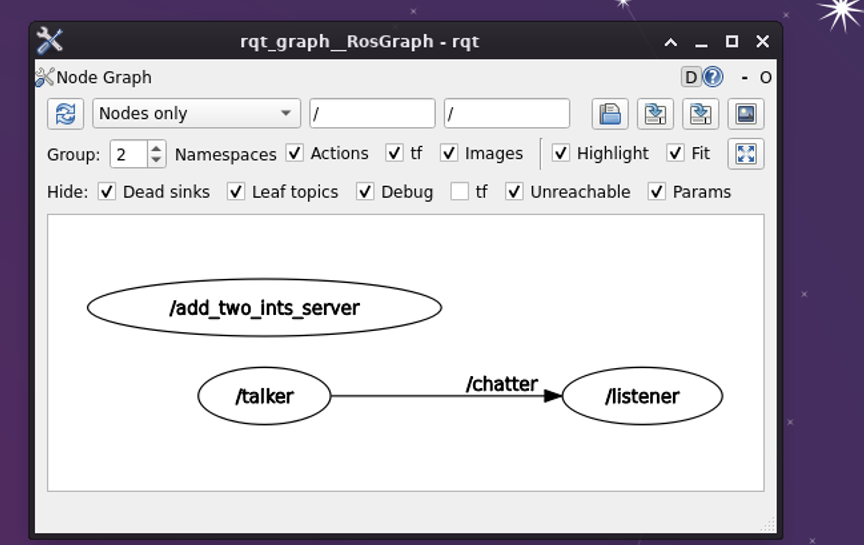
4.可視化工具
rqt_graph:清晰展示節點拓撲,系統架構一目了然。
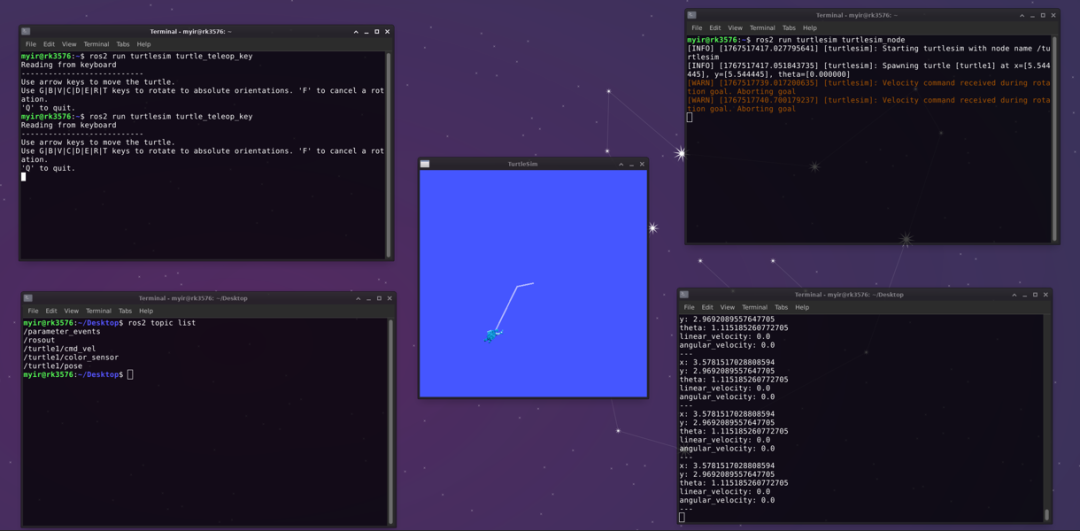
5
.小烏龜-Turtlesim經典演示
終端1啟動”小烏龜”
ros2run turtlesim turtlesim_node
終端2開啟鍵盤控制
ros2run turtlesim turtle_teleop_key
終端3開啟查看活躍話題
ros2topic list
終端4查看烏龜實時位置
ros2 topicecho/turtle1/pose
三、RVIZ2三維可視化實戰
1.啟動與界面
啟動命令
Ros2run rviz2 rviz2
界面
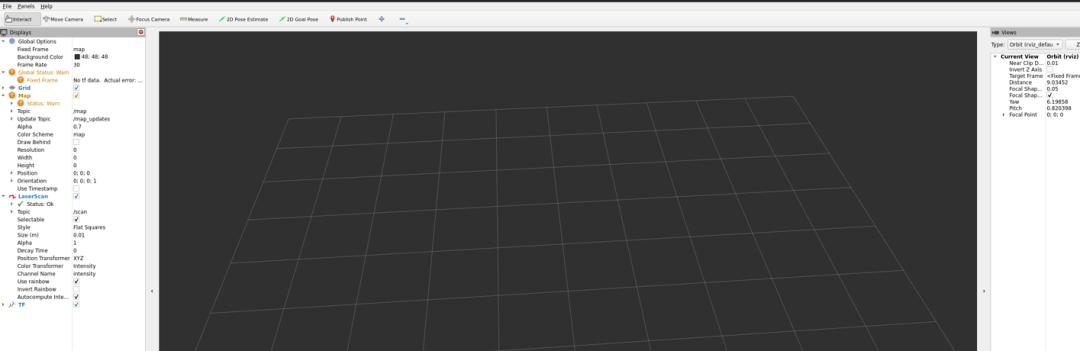
成功啟動RVIZ2,界面加載完整,支持3D可視化交互。
2. 機器人模型加載
aptinstall ros-humble-urdf-tutorialros2launch urdf_tutorial display.launch.py model:=urdf/01-myfirst.urdf
3.性能實測
2K分辨率全屏:CPU占用約60%
GPU負載:36%@700MHz
渲染體驗:操作流暢,視角切換無卡頓
四、總結與展望
RK3576平臺完全具備運行完整ROS2生態的能力,性能滿足:
機器人算法開發與調試
三維可視化與仿真
多傳感器數據融合處理
教育實驗與原型驗證
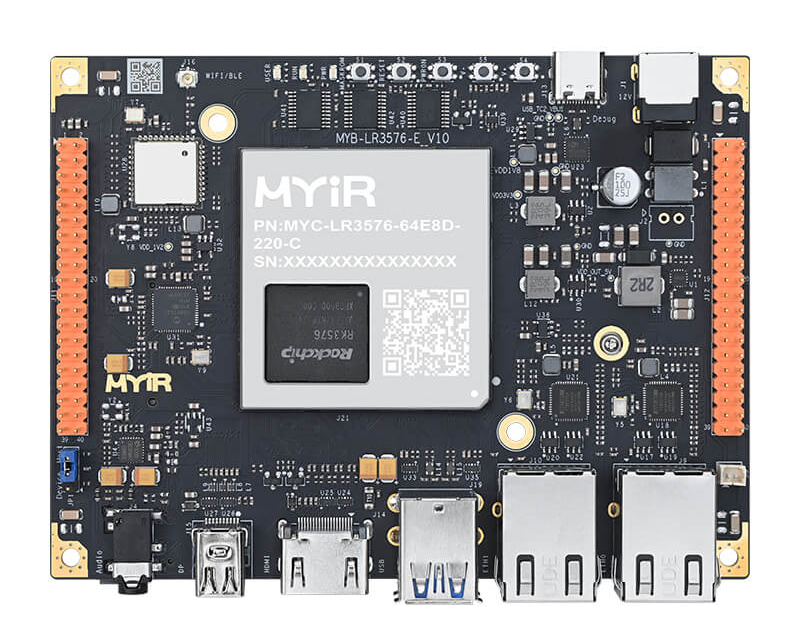
米爾基于RK3576開發板
核心優勢
1. 國產化價值:全鏈路自主可控,助力機器人領域國產替代
2.成本優勢:千元級開發板實現完整ROS2開發環境
3.功耗表現:典型場景功耗優于同性能x86平臺
4.生態完整:Ubuntu+ROS2+豐富外設驅動
未來計劃
進一步優化GPU驅動,提升3D渲染性能
集成SLAM、導航等實際機器人應用棧
推動在AGV、服務機器人等場景的落地應用
給開發者的建議
推薦場景:
高校機器人課程教學平臺
機器人算法研究與原型驗證
輕量級機器人產品開發
注意事項:
建議使用SSD或高速TF卡提升IO性能
復雜3D場景可適當降低渲染質量
多節點應用注意內存分配優化
 米爾電子最新“明星產品”速報
米爾電子最新“明星產品”速報





-
機器人
+關注
關注
213文章
31217瀏覽量
223010 -
軟件
+關注
關注
69文章
5341瀏覽量
91714 -
ROS
+關注
關注
1文章
295瀏覽量
18815 -
rk3576
+關注
關注
1文章
277瀏覽量
1629
發布評論請先 登錄
開發必看,RK3576基于Ubuntu22.04安裝 測試ROS2機器人系統

ROS2 SLAM建圖與導航實戰--基于米爾RK3576開發板
RK3576 + ROS2 SLAM建圖與導航實戰
RK平臺ROS2適配全指南:從編譯到運行,手把手搞定嵌入式機器人開發

米爾RK3576成功上車!ROS2 Humble生態系統體驗
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
巡檢機器人落地攻略:RK3576驅動12路低延遲視覺
【作品合集】米爾RK3576開發板測評
【作品合集】靈眸科技EASY EAI Orin Nano(RK3576)開發板測評
瑞芯微RK3576與RK3576S有什么區別,性能參數配置與型號差異解析
硬核上車!RK3576基于Ubuntu部署ROS機器人系統詳細攻略(下)

硬核上車!RK3576基于Ubuntu部署ROS機器人系統詳細攻略(上)




 工商網監
工商網監
評論