 如何訓練機器人學習新技能
如何訓練機器人學習新技能

10月27日消息,據外媒報道,約翰斯霍普金斯大學博士生安德魯洪特(Andrew Hundt) 近日發布一篇新論文,指出應通過正強化法訓練機器人學習新技能。
這篇論文的核心思想是,在訓練機器人的過程中,應采用正強化法,即相比于在它做錯時進行懲罰,更應在它做對時進行激勵。而對于機器人來說,這種激勵機制是以評分系統的形式呈現的,類似玩游戲一樣,根據執行任務的情況獲得積分。
安德魯表示,這種方法能夠大大縮短訓練機器人執行任務的時間。“機器人希望能得到更高的分數,所以它們很快就可以完成相關任務。過去機器人需要一個月的練習才能達到100%的準確性,現在只用兩天就能做到。”
不過他也指出,目前機器人執行的這些任務仍然是比較初級的,比如堆積木。但在未來,機器人有望通過正強化法完成更復雜和有意義的任務。
責任編輯:YYX
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31073瀏覽量
222189
發布評論請先 登錄
相關推薦
熱點推薦
NVIDIA神經網絡創新研究重塑機器人學習
目前,機器人在受控的環境中能夠有出色的表現,但在面對現實世界任務時,仍難以應對其中的不可預測性、操作靈活性和細微的交互需求,例如組裝精密組件或是以接近人類的精度操控日常物體。

NVIDIA Isaac Lab 2.3新增功能助力簡化機器人學習
基于真實世界演示訓練機器人策略,不僅成本高、速度慢,還容易出現過擬合問題,進而限制其在不同任務與環境中的泛化能力。而仿真優先的方法可簡化開發流程、降低風險與成本,同時部署到真實環境也將更安全、適應性更強。
NVIDIA開源物理引擎與OpenUSD加速機器人學習
開發能在工廠、醫院和公共空間與人類協同作業的機器人是一項巨大的技術挑戰。這類機器人需具備與人類接近的靈巧性、感知能力、認知能力和全身協調性,以便于實時應對充滿不確定性的真實環境。
NVIDIA 發布三大利器,推動人形機器人邁向新紀元
電子發燒友網綜合報道 在節前的機器人學習大會(CoRL)上,NVIDIA 發布了一系列突破性技術,包括開源物理引擎 Newton、機器人基礎模型 Isaac GROOT N1.6以及全新 AI
NVIDIA Isaac Lab多GPU多節點訓練指南
NVIDIA Isaac Lab 是一個適用于機器人學習的開源統一框架,基于 NVIDIA Isaac Sim 開發,其模塊化高保真仿真適用于各種訓練環境,可提供各種物理 AI 功能和由 GPU 驅動的物理仿真,縮小仿真與現實世界之間的差距。

英偉達發布機器人 “新大腦”,黃仁勛:人形機器人三年普及
完成如 “烤面包” 這樣的復雜任務。結合 Omniverse 仿真平臺,訓練效率提高了10倍,大大縮短了機器人學習和適應現實環境的時間。 英偉達創始人兼首席執行官黃仁勛在鏈博會上發表演講時指出,物理 AI 將推動 AI 從虛擬世界邁向實體領域,重構工業和日常生活
易控智駕與中科院端到端自動駕駛方案入選CoRL 2025
近日,旨在分享和探討機器人技術與機器學習交叉領域最新進展的國際頂級機器人學習會議CoRL 2025 (Conference on Robot Learning)論文接收結果揭曉。

海默智能噴涂機器人——為工業噴涂解鎖新技能
在工業噴涂領域面臨高精度與柔性化雙重挑戰的今天,傳統方式受限于編程效率與復雜曲面適應性,而資深技師的寶貴經驗亟待數字化傳承。海默機器人依托技術積累,推出移動式慣導隨動噴涂協作機器人,以“雙核動態捕捉

NVIDIA展示機器人領域的研究成果
在今年的機器人科學與系統會議 (RSS) 上,NVIDIA 研究中心展示了一系列推動機器人學習的研究成果,展示了在仿真、現實世界遷移和決策制定領域的突破。
NVIDIA Isaac Lab可用環境與強化學習腳本使用指南
Lab 是一個適用于機器人學習的開源模塊化框架,其模塊化高保真仿真適用于各種訓練環境,Isaac Lab 同時支持模仿學習(模仿人類)和強化學習(在嘗試和錯誤中進行

通過NVIDIA Cosmos模型增強機器人學習
通用機器人的時代已經到來,這得益于機械電子技術和機器人 AI 基礎模型的進步。但目前機器人技術的發展仍面臨一個關鍵挑戰:機器人需要大量的訓練

NVIDIA Isaac Sim和Isaac Lab現已推出早期開發者預覽版
NVIDIA 發布了機器人仿真參考應用 Isaac Sim 和機器人學習框架 Isaac Lab 的開發者預覽版。開發者現在可以通過 GitHub 訪問早期版本,搶先體驗先進功能,用于在基于物理的仿真環境中構建、訓練和測試 AI
NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
在 COMPUTEX 2025 上,NVIDIA 宣布了機器人仿真參考應用 NVIDIA Isaac Sim 和機器人學習框架 NVIDIA Isaac Lab 的更新,以加速各種形態機器人的開發。
構建人形機器人學習的合成運動生成流程
通用人形機器人需要能夠快速適應現有的以人類為中心的城市和工業工作空間,處理繁瑣、重復或體力要求高的任務。這些移動機器人經過設計,能在以人類為中心的環境中有出色的表現,從工廠車間到醫療醫療機構,它們的價值日益凸顯。

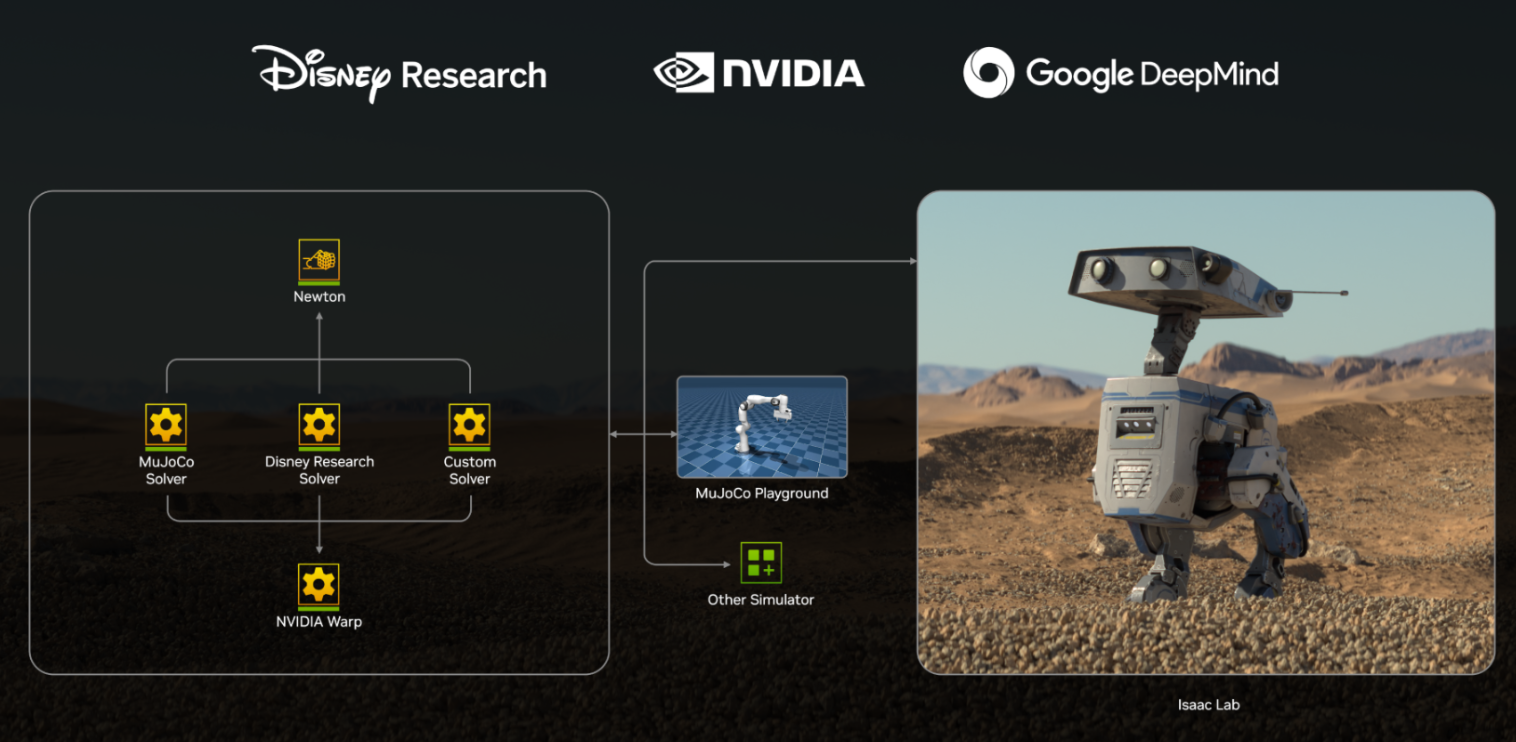
深度解讀英偉達Newton機器人平臺:技術革新與跨界生態構建
Newton是由NVIDIA、Google DeepMind和Disney Research開發的開源、可擴展的物理引擎,旨在推進機器人學習和開發。 Newton建立在 NVIDIA Warp



 工商網監
工商網監
評論