 利用AGV導航激光定位技術解決移動機器人取卸貨不成功的問題
利用AGV導航激光定位技術解決移動機器人取卸貨不成功的問題

文|機械科學研究總院 機科發展科技股份有限公司
劉媛媛、徐京邦、張豐華、王小鐸、劉之舟
針對移動機器人激光導航定位取卸貨過程,發生的貨物位置偏差大而導致的取卸貨不成功的情況,本文給出了一種解決方法,即視覺輔助運用模板匹配,提取感興趣區域,邊緣檢測提取輪廓找中心點來檢測貨物托盤所在的位置,再通過數據通信轉換,將視覺檢測結果傳輸給移動機器人,從而可保證其能夠連續穩定地進行取卸貨。
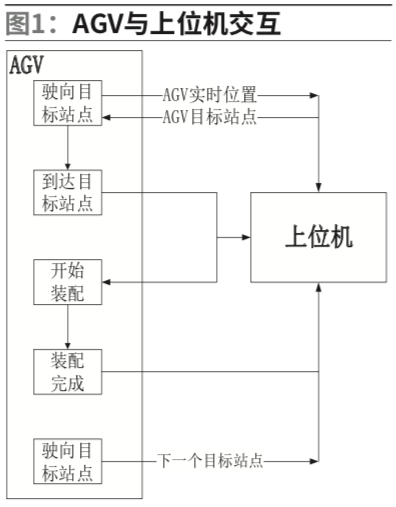
目前AGV導航定位使用中較為普遍的技術是激光定位技術。激光傳感器被固定在AGV頂部,掃描與其在一個固定平面上的反光板與移動機器人的距離,并依據反饋的距離數據構建成導航地圖。在導航過程中,AGV規劃的前往地圖中上位機下發的已知的目標地點執行任務,同時AGV實時反饋位置信息和任務執行情況,如圖1。
過程中由于貨物的存放可能存在人為改變,或是AGV某一次存放位置偏差較大等,這會造成下一次AGV裝配過程的失敗,執行效率降低的同時存在一定不安全性,因此本文提出在實際應用中利用激光導航定位的同時,結合視覺傳感器獲取信息豐富的特點,對視覺信息進行基于灰度值的模版匹配算法與輪廓邊緣檢測算法找出待取貨物下托盤的中心位置,來保證AGV能夠進行正常的任務操作。
一、系統結構
系統主要包含三個模塊:1.AGV系統調度;2.視覺輔助;3.數據通信。AGV系統硬件結構,如圖2。
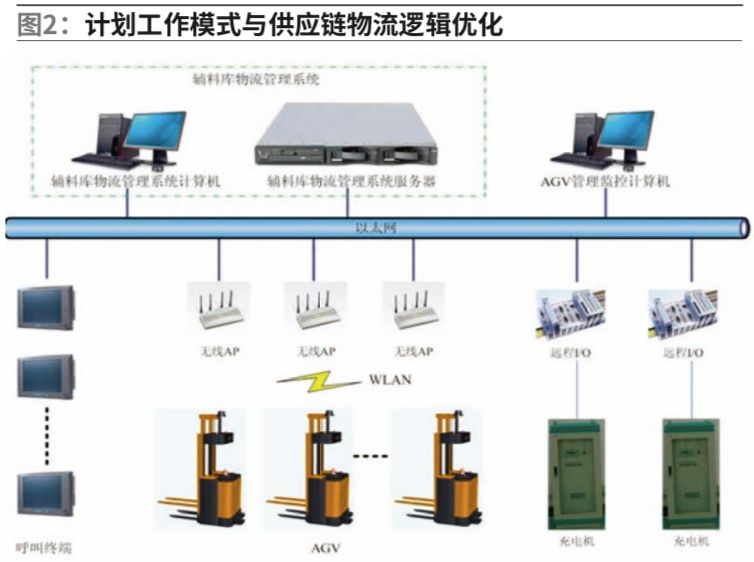
激光定位選擇比較成熟的基于反光板的定位算法,物料管理系統下發任務,AGV管理監控計算機將任務具體下發分配給AGV,車到相應站臺執行任務。視覺輔助運用模板匹配,提取感興趣區域,邊緣檢測提取輪廓找中心點來檢測貨物托盤所在的位置,數據通信部分則主要進行通信轉換,將視覺檢測結果傳輸給AGV,AGV依據得到數據,對車位置進行相應調整,同時包含一些對HMI與相機實時通信交互。
1.激光雷達
測激光雷達采用倍加福與科爾摩根共同開發的LS2000,是脈沖測距技術的二維激光掃描儀,具有很高的重復精度和較短的響應時間,其掃描角度360°,測量距離可達30米,10~50Hz掃描頻率,激光傳感器安置在車體頂部,激光導航基于使用反光板的自由制導。使用反光板更新位置,根據跟蹤車輛運動的里程表(編碼器數據),車輛位置會不斷更新。使用反射器的量值更新位置。導航始終處于活動狀態。激光掃描的2D平面數據信息來進行激光導航定位與地圖構建。
2.單目相機
用易福門O3D303的3D攝相機,能夠提供352×264的RGB圖像及深度圖像,每次測量輸出 23000 個距離和灰度值,可進行距離、液位或體積的視覺評估,我們這里主要用于距離視覺評估,孔徑角為60×45,有效深度范圍0.3~8.0m,通過以太網接口進行通信。其在車體上安裝,如圖3。
3.通信系統
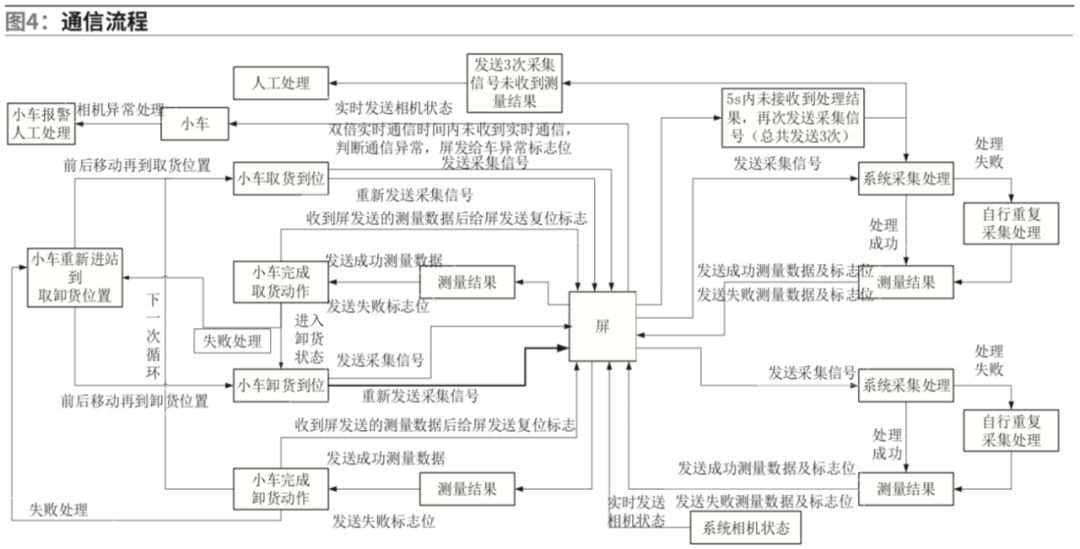
AGV與相機的通信用貝加萊的觸摸屏進行數據轉換,HMI與車之間用CAN通信,觸摸屏和相機之間用UDP通信,圖4通信流程圖給出了彼此之間具體的通信步驟和遇到問題的一些處理方式,數據傳輸采用實時通訊,以保證相機的正常工作和相機與屏之間通信的正常,從而保證整個系統成功運行。
4.OpenCV
OpenCV 是一個開源的代碼部分用C/C++編寫的計算機視覺庫,能夠運行在 Windows、Mac、Linux等操作系統上,其對 Python、Ruby、Java 等語言均具有良好兼容性,具有相應接口,OpenCV用一個簡單的計算機視覺框架幫助程序開發人員高效地開發出相關的程序。
二、圖像處理
1.模板匹配
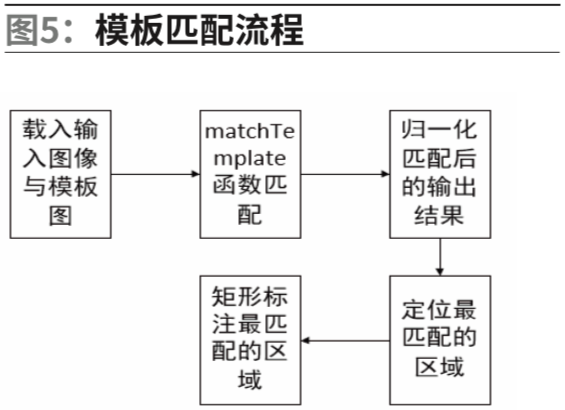
模板匹配是一項在一幅圖像中尋找與另一幅模板圖像最匹配部分的技術,這種方法原理簡單,具有較高匹配精度,遍歷圖像中的每一個位置,比較模板與各位置相似程度,當匹配度量值足夠高時,就認為在搜索圖中找到了目標。模板匹配的實現函數:matchTemplate(srcImage ,templateImage , result , MatchMethod );其實現流程圖與模板和搜索結果如圖5、圖6、圖7,MatchMethod采用標準相關性系數匹配,其采用相關系數(標準化的協方差)作為相似性度量。
2.邊緣檢測與定位中心點
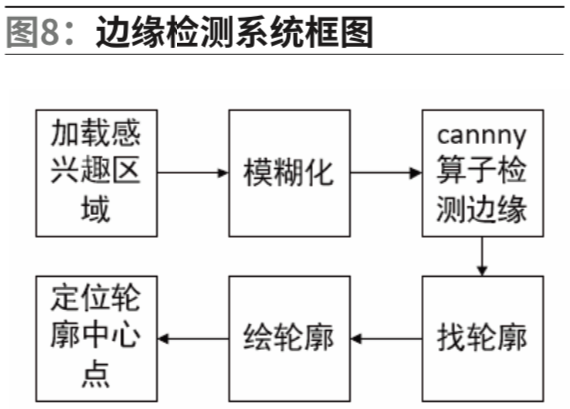
基于模板匹配出的感興趣區域,將其從搜索結果圖中單獨提取出來進行邊緣檢測,邊緣檢測系統由加載感興趣區域、模糊化降噪、Canny算子邊緣檢測、尋找輪廓、繪制輪廓、定位輪廓中心點組成。對于尋找到的所有輪廓,通過設定閾值移除過大或過小輪廓,最終得到矩形輪廓,進而對矩形區域尋找中心點,提取繪制的輪廓,如圖8。
三、實驗結果與分析
在已有激光導航系統中加入視覺定位數據,并在室內環境進行測試,實驗目的是測試在貨物存放已有誤差的條件下,視覺定位數據信息發送給激光導航的AGV,AGV依據它進行位置調整后進行取卸貨。首先帶有任務的AGV到達指定位置等待視覺系統拍照處理,對處理后的灰度圖進行模板匹配、將匹配出的模板部分提取出來進行邊緣檢測輪廓提取,最后根據檢測的矩形輪廓找尋到要定位的中心點,并經過坐標轉換求得車相對中心點的偏移,最終得到的檢測結果如圖9,
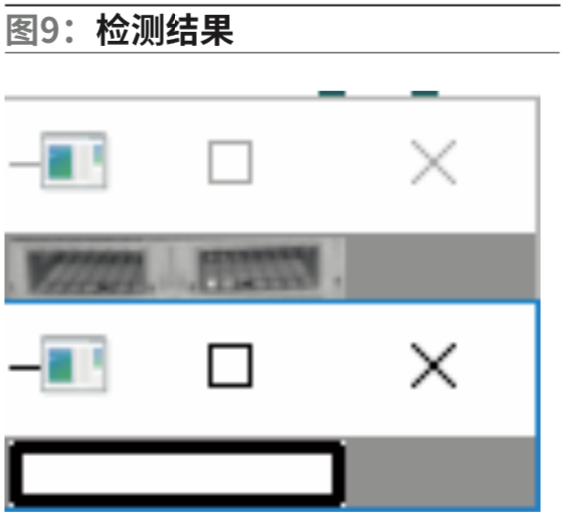
實驗結果如圖10。
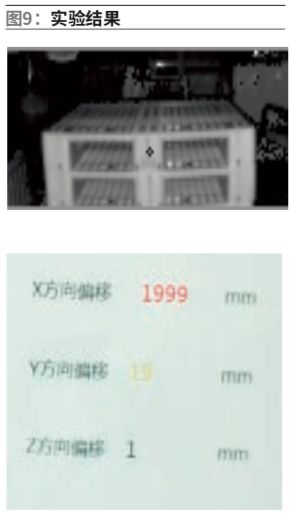
可見,視覺系統可以較為精準的得出偏移信息,實現了AGV更為有效精準的任務執行流程。
四、總結與展望
激光定位能夠實現較高精度水平的定位,但在上位機已經下達所需要取卸貨位置后,AGV會嚴格按照任務命令執行,到達位置是在誤差范圍內固定的,存在裝載失敗、取不到貨物的情況,AGV 輸送系統的主要特點把物流優化到最佳狀況做到效率最優化,故加入視覺輔助信息,極大增強貨物存卸位置的靈活性,極大提高了工作效率,減少了現場調試人員的任務工作量,視覺信息的補充使得最終移動機器人可以快速準確地完成工作,為任務快速高效完成提供助力。
聲明:部分內容來源于網絡,僅供讀者學術交流之目的。文章版權歸原作者所有。如有不妥,請聯系刪除。
責任編輯:PSY
原文標題:視覺系統輔助引導在激光導航AGV中應用
文章出處:【微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
213文章
31079瀏覽量
222244 -
移動機器人
+關注
關注
2文章
818瀏覽量
34868 -
AGV
+關注
關注
28文章
1554瀏覽量
43670 -
激光定位
+關注
關注
0文章
7瀏覽量
8750
原文標題:視覺系統輔助引導在激光導航AGV中應用
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
探索 NXP MR - CANHUBK344 評估板:為移動機器人應用賦能
Infineon移動機器人電機控制方案深度解析
Infineon DEMO_IMR_BMSPWR_V1:移動機器人電池管理系統的卓越之選
Infineon DEMO_IMR_BMSCTRL_V1:助力移動機器人電池管理的創新方案
移動機器人“芯”引擎爆發,禾賽、海思新品逆襲

AGV機器人選型技術分析與應用策略
移動機器人技術的發展歷程
恩智浦自主移動機器人設計要點




 工商網監
工商網監
評論