 研究人員提出了一個名為CommPlan的框架
研究人員提出了一個名為CommPlan的框架

在一項新的研究中,麻省理工學院計算機科學與人工智能實驗室的研究人員提出了一個名為CommPlan的框架,該框架為機器人提供了與人類遵循“良好禮節”原則的功能,并將其留給機器人做出使他們有效完成任務的決策。他們聲稱這是手工制定規則的一種出色方法,因為它使機器人能夠對其決策進行成本效益分析,而不必遵循特定于任務和上下文的策略。
CommPlan權衡一系列因素,包括一個人是否忙還是可能對給定的過去行為做出響應,利用一個專用模塊-Agent Markov模型-來代表該人的順序決策行為。它由模型規范過程和執行時部分可觀察的馬爾可夫決策過程(POMDP)計劃程序組成,該計劃程序是作為機器人的決策模型而衍生的,CommPlan結合使用該模型來得出機器人的動作和通信策略。
使用CommPlan,開發人員首先使用數據,領域專業知識和學習算法指定五個模塊-任務模型,通信功能,通信成本模型,人員響應模型和人員可選動作模型。通過對所有模塊的分析組合,得出決策模型,并且在任務執行期間,機器人使用硬件傳感器,決策模型和POMDP求解器來計算其策略。最后,使用機器人的執行器和通訊方式執行策略。
為了評估CommPlan,研究人員進行了一項實驗,其中涉及帶有Robotiq抓手的Universal Robot 10和15名人類參與者,他們的任務是在廚房中做飯。機器人必須在0.3秒的規劃時間內對一個較大的狀態空間進行推理,并確定(1)接下來應裝滿四個杯子中的哪個杯子;(2)是否等待以確保安全或移動完成任務,(3 )如果它選擇移動,其軌跡到達杯子,(4)是否使用其通信方式;(5)要傳達的通信消息。
該團隊報告說,該機器人成功地與人類合作完成了諸如組裝配料,包裹三明治和倒汁等任務。重要的是,與基線手工制定和無通信的靜默策略相比,它這樣做更加安全有效。
論文的共同作者和麻省理工學院的研究生沉力說:“許多手工制定的政策有點像是一個同事一直在困擾著你,而不是Slack,或者是一個微觀管理的老板反復問你取得了多少進展。” “如果您是緊急情況下的第一響應者,那么與同事的過多溝通可能會分散您的主要任務。”
-
傳感器
+關注
關注
2576文章
55028瀏覽量
791240 -
機器人
+關注
關注
213文章
31073瀏覽量
222180 -
人工智能
+關注
關注
1817文章
50094瀏覽量
265287
發布評論請先 登錄
摩爾線程新一代大語言模型對齊框架URPO入選AAAI 2026

研究人員復興針孔相機技術以推動下一代紅外成像發展
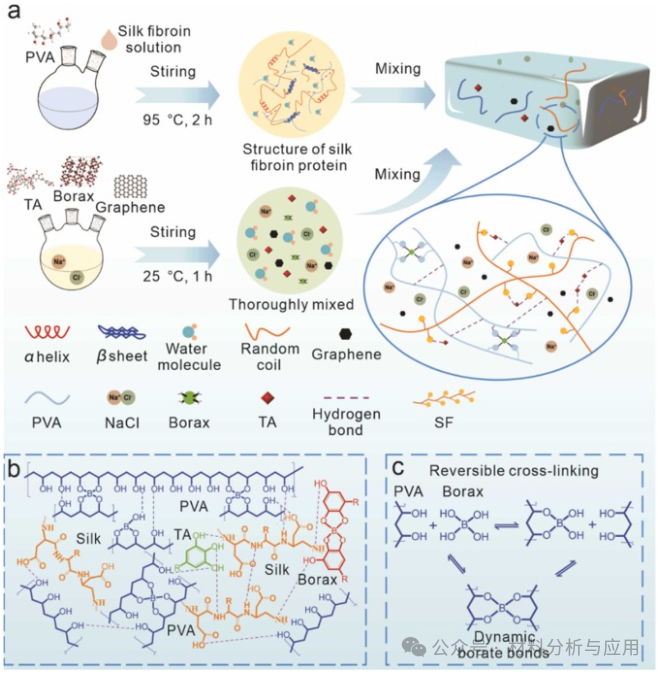
安徽大學:基于聚乙烯醇/絲素蛋白/石墨烯水凝膠的柔性傳感器,用于先進的可穿戴電子產品等
我國科研人員提出緊湊型太赫茲三光梳光源實現方案
一種適用于動態環境的自適應先驗場景-對象SLAM框架

大小鼠糖水偏好實驗系統
無速度傳感器感應電機控制系統轉速辨識方法研究
無刷直流電機雙閉環串級控制系統仿真研究
無刷直流電機改進型直接轉矩控制研究
微雙重驅動的新型直線電機研究
下一代高速芯片晶體管解制造問題解決了!
雙定子直線振蕩電機動子位移自傳感技術研究
研究人員開發出基于NVIDIA技術的AI模型用于檢測瘧疾
一種實時多線程VSLAM框架vS-Graphs介紹

動量感知規劃的端到端自動駕駛框架MomAD解析




 工商網監
工商網監
評論