LiDARInnovizPro、S3、SLAM on Chip、VLS-128。激光雷達是自動駕駛系統中一個非常重要的組件。在許多傳統供應商和新創公司看來,未來自動駕駛汽車在障礙探測和 SLAM(實時定位和地圖構建
2018-07-26 20:45:02
想了解行業國內做固態激光雷達的廠家,激光雷達里面是怎么樣的啊
2021-01-17 15:29:39
、速度等特征量的雷達系統,正是這樣的一個系統,成為了無人駕駛汽車的靈魂所在。激光雷達成名于2012年谷歌無人駕駛汽車的橫空出世,當時頭頂“大鐵桶”的谷歌無人駕駛汽車在全世界范圍內引起轟動,“大鐵桶”也
2017-10-20 15:49:06
激光雷達實際上是一種工作在光學波段(特殊波段)的雷達,它的優點非常明顯:1、具有極高的分辨率:激光雷達工作于光學波段,頻率比微波高2~3個數量級以上,因此,與微波雷達相比,激光雷達具有極高的距離
2017-09-19 15:51:15
lidar_camera_calibration項目——激光雷達和相機聯合標定
2019-04-12 09:27:38
最為重要的,目前,主流的用于周圍環境感測的傳感器有激光雷達、毫米波雷達、視覺傳感器三種。1.自適應巡航控制系統 Adaptive Cruise Control(ACC)自適應巡航控制系統是一種智能化
2017-10-18 17:18:24
`科技的進步日新月異,要數在汽車圈子里最火熱的詞匯,自動駕駛輔助系統一定是位居榜單前列的,而自動駕駛中核心的硬件之一—激光雷達,也是屢屢被各家車企送上熱搜榜單,成為了業界內關注的重心。激光雷達被
2021-03-18 11:14:17
漸漸覺得激光雷達是非常重要的。從左邊看,這是一個傳感器的輸入,如激光雷達、攝像頭、毫米波、GPS、編碼器和 IMU。這些傳感器的數據輸入到系統的感知算法里,對于這個感知算法,我們會將這些數據進行處理分析
2017-09-08 17:24:48
就非常重要。一款號稱有10多米的激光雷達,如果對于深色物體只有幾米的檢出率,那就容易導致機器定位和建圖出現問題,對后期的定位導航工作也會產生很大的影響。目前,激光雷達所標稱的距離大多以90%反光率
2018-02-07 13:40:27
`最近突然對機器人距離探測設備感興趣就打算著手做個激光雷達玩玩。。。。可以在設計方案的時候發現角度信息很難解決。多以想看看大家有沒有做過這方面的。幫忙想下。。。。如果哪位土豪家里有掃地機器人可以拆下,,,,,給大家介紹下,,,哈哈哈。。。。哪位大神如果做過,,,能不能幫幫偶。。。`
2016-04-16 17:45:28
被測物體與測試點的距離。傳統上,激光雷達可用于工業的安全檢測領域,如科幻片中看到的激光墻,當有人闖入時,系統會立馬做出反應,發出預警。另外,激光測距雷達在空間測繪領域也有廣泛應用。但隨著人工智能
2020-07-14 07:56:45
比對上一幀和下一幀環境的變化可以較為容易的探測出周圍的車輛和行人。2.SLAM加強定位。激光雷達另一大特性是同步建圖(SLAM),實時得到的全局地圖,通過與高精度地圖中特征物的比對,可以實現導航及加強
2017-10-16 16:31:32
在很多人印象中激光雷達還是那個通過旋轉完成激光測距幫助機器人完成定位、建圖輔助后續導航的激光傳感器RPLIDAR定位建圖 但其實,除了可以應用在機器人定位建圖、自主導航、障礙物檢測與規避等領域外他
2018-05-11 15:33:44
計算機視覺的一個組件,但點云卻是完全基于幾何呈現的。相反,人眼除了形狀之外還能識別物體的其他物理屬性,比如顏色和紋理。現在的激光雷達系統不能區分紙袋和巖石之間的差別,而這本應是傳感器理解和試圖避開障礙物時考慮的因素。
2017-09-26 14:30:16
地實現多AGV小車的協調控制。 ■激光雷達在AGV小車中的使用 SLAM中可以進行環境信息感知的主要傳感器有激光雷達、攝像頭等。其中,基于激光雷達的AGV小車自主定位與建圖的方法,由于其測量精度高
2018-11-09 15:59:01
有道友能介紹介紹EAI激光雷達嗎?
2020-12-31 17:48:20
FMCW激光雷達與dTOF激光雷達的區別在哪?
2021-07-23 13:22:37
數字化是很重要的一個環節。圖1是差分激光雷達接收系統的原理圖,圖上只列出了主要部件。下面我們重點介紹一下對數據采集卡的要求。激光雷達通常以20HZ的頻率發射激光脈沖,要求AD采集卡以10MHZ的速度與發射
2016-05-23 14:44:42
TOF 方案激光雷達是激光雷達新一代技術方案,本產品解決了如市場三角測試法等產品組裝問題難,價格成本高等問題,目前提供面陣及單光子技術,基于COM產品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX學習筆記——TOF 高速單線激光雷達 L10_串口中斷通信1. TOF 高速單線激光雷達 L102. STM32 Cube MX配置代碼配置1. TOF 高速單線激光雷達
2022-03-02 07:19:03
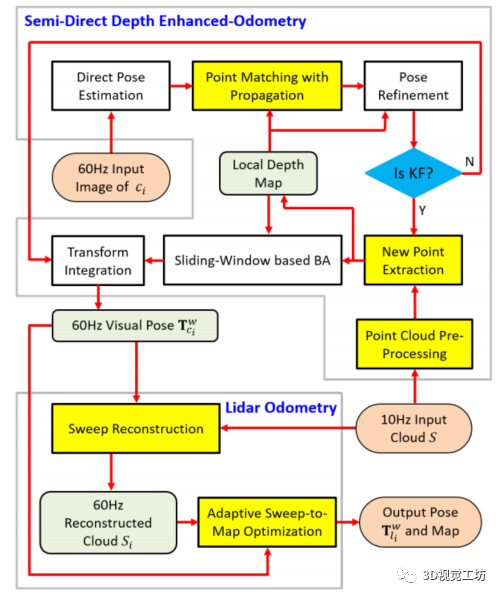
基于MUSE Pi Pro的3D激光里程計實現技術文檔
內容摘要
本文檔詳細介紹了基于MUSE Pi Pro開發板和速騰聚創Airy 96線激光雷達實現3D激光里程計系統的完整技術方案。重點闡述了
2025-10-24 17:02:07
就非常重要。一款號稱有10多米的激光雷達,如果對于深色物體只有幾米的檢出率,那就容易導致機器定位和建圖出現問題,對后期的定位導航工作也會產生很大的影響。目前,激光雷達所標稱的距離大多以90%反光率
2018-02-02 14:06:27
主要內容本文提出了一種不依賴于棋盤格等輔助標定物體,實現像素級相機和激光雷達自動標定的方法。方法直接從點云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續邊。文中首先指出:以下四種
2021-09-01 07:42:19
,角度分辨率較低。圖中微波雷達(黑色)將無法區分這兩輛車,而激光雷達(紅色)可以。 對汽車激光雷達系統設計者來說,最關鍵的選擇之一是光波長。制約這一選擇的因素有幾個: · 對人類視覺的安全性 · 在
2018-09-10 14:10:45
說到機器人自主定位導航解決方案及技術,大家腦海里肯定會浮現“定位”、“建圖”、“避障”、“路徑規劃”等字眼。定位 在思嵐提供的自主定位導航解決方案中,主要是通過雷達和里程計的數據來進行定位。雖然
2018-03-28 15:48:15
誰能幫幫小弟我! 十分感謝! 要求:用c語言編寫一個自行車速度計和里程計! 基于芯片AT89C51,用霍爾元件測速度!用lcd1602顯示最好!不要求報警!能有一個開關暫停顯示!小弟的qq1252295329!!求大神高手指點一個
2013-04-16 20:01:46
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經
2018-01-25 09:38:47
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經擺放著
2018-01-26 09:19:09
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經
2018-01-25 09:36:04
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經
2018-01-25 09:41:33
【新技術發布】基于深度神經網絡的激光雷達物體識別系統及其嵌入式平臺部署激光雷達可以準確地完成三維空間的測量,具有抗干擾能力強、信息豐富等優點,但受限于數據量大、不規則等難點,基于深度神經網絡
2021-12-21 07:59:18
基于深度神經網絡的激光雷達物體識別系統及其嵌入式平臺部署
2021-01-04 06:26:23
來檢測物體。激光雷達系統的視場 (FOV) 決定了激光雷達能夠捕捉到的圖像的寬度,因此該視場對于自動駕駛決策算法十分重要。擴大FOV的方法有很多種,其中之一就是利用機械掃描,使用電機幫助實現360度
2022-11-03 07:12:38
里程計工作原理是什么?汽車里程計的受擾現象有哪些?
2021-05-19 07:26:30
如何實現出租車里程計時系統設計?
2021-10-27 07:17:30
視覺慣性里程計 綜述 VIO Visual Inertial Odometry msckf ROVIO ssf msf okvis ORB-VINS VINS-Mono gtsam目錄里程計
2021-07-27 07:21:50
1、概述由于課題要求,需要設計一款適合于果園應用的激光雷達。因此采用單線掃描激光雷達和角度傳感器來設計能采集二維數據的激光雷達。關于數據的轉化的理論,我們可以查閱相關文獻。在此,只講基本的構造和程序
2021-11-12 08:15:02
本文檔的主要內容詳細介紹的是小米的2D激光雷達拆解圖和講解。
2023-09-22 08:07:45
單線激光雷達特點:結構簡單、掃描速度快、分辨率高、可靠性高、成本低。單線激光雷達實際上就是一個高同頻激光脈沖掃描儀,加上一個一維旋轉掃描。單線激光雷達雖然原理簡單但是可以有效、高頻的測試物體的距離
2017-09-25 11:30:10
的具體姿勢視覺傳感器:結合激光雷達,做SLAM建圖圖源:Science Robotics其中,相信大家對這款激光雷達很眼熟,就是思嵐科技的 RPLIDAR A1。A1的應用,可以用來幫助盲人探測周圍物體
2021-11-12 14:12:43
`TFmini是北醒在推進激光雷達低成本化進程中里程碑式的一步。 產品配以獨特的光學、結構和電子設計,使得產品具有低成本、小體積和低功耗三大優點。 產品內置室內外各應用環境的適配算法,可保證產品在
2018-01-04 10:22:39
廣泛的應用。 由于激光雷達可以形成精度高達厘米級的 3D 環境地圖, 因此在 ADAS 及無人駕駛系統中具有重要作用。激光雷達在無人駕駛中的作用路徑規劃,是解決無人車從起點到終點,走怎樣路徑
2017-10-23 17:51:41
。相對于傳統的安防監控系統來說,基于激光雷達的安防監控方案在滿足客戶基礎的安全防護監控、報警功能的同時,更能夠提升客戶的深層次需求。激光雷達在安防監控領域逐步顯現出獨特、巨大的優勢。圖1:傳統安防監控系統
2020-02-29 17:03:44
同樣定位建圖效果的視覺技術,為什么不能說TA跟機器人才是更配的CP組合?下面,小嵐做了個簡單分析。 通過上圖可以看出:不可否認,視覺攝像頭在幫助機器人定位建圖方面的作用不可小覷,但激光雷達相比視覺
2019-02-15 15:12:28
較高,因此非常適合用于泊車。 激光雷達激光雷達是軍轉民的高精度雷達技術。在汽車領域的應用,主要是用于無人駕駛系統,通常將激光雷達放置于車頂或車身的前后左右,但目前多處于試驗階段。激光雷達是以激光為工作
2019-09-19 09:05:02
,然而其劣勢在于對靜止物體如隔離帶的探測較弱且目前技術落地成本高昂。由于激光雷達可廣泛應用于ADAS系統,例如自適應巡航控制(ACC)、前車碰撞警示(FCW)及自動緊急制動(AEB),因此吸引了不少具有
2017-09-06 11:36:58
提供給客戶,或提供系統級參考設計。而作為機器人的眼睛,激光雷達能夠幫助倉儲AGV在倉庫中自主避開障礙。目前用于倉儲AGV避障傳感器方案主要有:激光雷達、視覺傳感器(攝像頭)、紅外傳感器、超聲波傳感器等
2017-12-07 14:47:45
iphone12這個亮點不在5G上面,畢竟國內的一些廠商早就已配備,也不在顏色,重點在于配備了一顆激光雷達!先說一下這個激光雷達帶來的用途,最直接的就是能夠快速精準對焦,即使在晚上也能夠很好實現
2021-07-22 09:12:51
直接計算非相干檢測方式下所需最小光功率的方法。仿真結果表明,由該方法計算的最小光功率能夠更好地優化激光雷達系統的性能。關 鍵 詞 激光雷達; 最小接收功率; 探測概率; 虛警概率Abstract
2009-05-15 01:20:13
SLAM 前端里程計做累加,可以配合高精地圖的圖匹配,做類似后端回環優化的方式,將GPS、激光雷達及已知地圖進行融合定位。3. 自動駕駛多對雙目視覺攝像頭SLAM方案這種方案成本低,更加考究的是算法,有很少
2019-05-09 04:41:09
周圍障礙物的距離,誤差僅為毫米級。商場導引導購機器人這是目前在商場里經常能看到的服務型機器人。該產品采用360度激光雷達掃描測距傳感器,可實現機器人自主同步建圖及定位導航,適用于室內陪護、酒店前臺、商場
2018-09-10 16:32:46
請問激光雷達和激光掃描儀的具體區別在哪兒?
2022-05-13 11:05:19
請問如何理解SLAM用到的傳感器輪式里程計IMU、雷達、相機的工作原理?
2021-10-09 08:52:46
激光雷達是如何產生的?激光雷達在自動駕駛領域有什么作用?
2021-06-17 07:31:54
的環境感知系統一般由多個傳感器組成,包括激光雷達、毫米波雷達、攝像頭、GPS 等。其中,攝像頭、毫米波雷達、激光雷達是無人駕駛汽車中最常用的三種環境感知解決方案。 攝像頭的優點是成本低廉,圖像算法
2017-08-21 14:54:32
建圖,路徑規劃、自主避障等任務,它是目前性能最穩定、可靠性最強的定位導航方法,且使用壽命長,后期改造成本低。 掃地機器人是目前單線激光雷達應用最廣泛的領域,激光雷達配合slam算法,可以讓掃地機
2018-12-10 14:55:39
請問各位大咖,激光雷達的測量距離能到多少?
2022-10-05 03:18:49
經緯恒潤激光雷達集成系統(Integrated LiDAR System)搭載了激光雷達折疊收納機構和綜合清洗系統
2024-11-28 11:25:29
通過分析全景視覺與里程計傳感器的感知模型的不確定性,提出了一種基于路標觀測的 移動機器人 自定位算法. 該算法利用卡爾曼濾波器,融合多種傳感器在不同觀測點獲取的觀測數據完
2011-06-28 10:58:46 41
41 移動底座和激光雷達與Cortex-A53平臺都是通過串口來通信的。在基于Cortex-A53處理器的平臺上處理激光雷達的掃描數據以及底座中采集的里程計數據,結合激光雷達的數據和里程計數據實現機器人的定位,并在定位的基礎上利用雷達掃描數據實現二維地圖構建。
2018-03-13 09:15:32 10391
10391 
使用幾何假設和測試架構從特征軌跡產生相機運動的魯棒估計。這就產生了我們稱之為視覺測徑法,即僅從視覺輸入的運動估計。沒有事先知道的場景或運動是必要的。視覺里程計還可以結合來自其他來源的信息,如GPS、慣性傳感器
2018-12-03 08:00:001 激光雷達因其可靠性目前仍是無人駕駛系統中最重要的傳感器,然而,在現實使用中,激光雷達并不是完美的,往往存在點云過于稀疏,甚至丟失部分點的問題,對于不規則的物體表面,使用激光雷達很難辨別其模式,在諸如大雨天氣這類情況下,激光雷達也無法使用。
2019-01-21 16:06:477740 激光雷達流派和純計算機視覺流派一直在自動駕駛技術中的感知層解決方案上喋喋不休。激光雷達派認為純視覺算法在數據形式和精度上的不足;純視覺流派則認為激光雷達不必要且過于昂貴。
2019-05-22 11:25:3911409 在導航系統中,里程計(odometry)是一種利用致動器的移動數據來估算機器人位置隨時間改變量的方法。例如,測量輪子轉動的旋轉編碼器設備。里程計總是會遇到精度問題,例如輪子的打滑就會導致產生機器人移動的距離與輪子的旋轉圈數不一致的問題。
2019-08-08 14:21:1327970 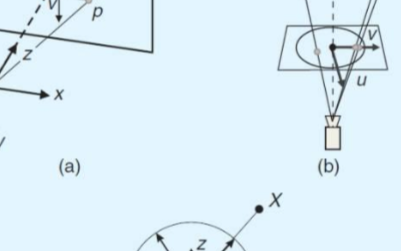
去年7月,思嵐科技推出了業內首款激光建圖雷達SLAMTEC Mapper,贏得了市場的高度肯定,它與傳統的激光雷達有所不同,其內置了SLAM實時地圖構建和定位功能,在手持情況下,可直接對外輸出高品質
2020-05-09 09:38:069959 但是,埃隆·馬斯克真的就將激光雷達踩在腳底了嗎?恰恰相反,他清楚地認識到視覺與激光雷達的優劣勢,同時不斷推動讓視覺方案做到本只能由激光雷達做到的事情。
2020-09-23 16:30:228146 魯棒數據關聯是視覺里程計的核心問題,圖像間的對應關系為攝像機姿態和地圖估計提供了約束條件。目前最先進的直接和間接方法使用短期跟蹤來獲得連續的幀到幀約束,而長期約束則使用循環閉包來建立。在這篇論文
2020-10-28 08:00:000 本文提出的立體視覺+慣導+激光雷達的SLAM系統,在比如隧道一些復雜場景下能夠實現良好性能。VIL-SLAM通過將緊密耦合的立體視覺慣性里程計(VIO)與激光雷達建圖和激光雷達增強視覺環路閉合相結合
2021-02-18 17:59:062834 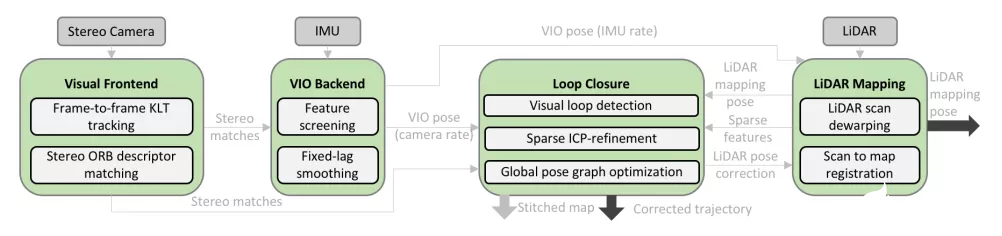
VIO-SLAM Visual-Inertial Odometry(VIO)即視覺慣性里程計,有時也叫視覺慣性系統(VINS,visual-inertial system),是融合相機和IMU數據
2021-04-07 16:57:073901 
的突破,同時FMCW激光雷達最終將會取代目前的ToF激光雷達系統。但是這項技術真的有潛力改變這個行業嗎?FMCW目前的應用狀況如何?為什么大多數激光雷達制造商現在仍更愿意繼續依賴ToF激光雷達系統?此次專訪,安創成長營九期團隊光勺科技創始人姚建就FMCW激光雷達的有關問題進行答疑解惑。
2021-08-26 11:44:466302 激光雷達是什么? 激光雷達(英文:Lidar),激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強等
2022-06-20 16:53:4125989 從全稱上可以看出,該算法是一個緊耦合的雷達慣導里程計(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM庫中的方法。
2022-09-14 10:11:012469 相機和激光雷達之間的時間戳同步問題一直是實時跑SLAM的先決條件。本文試圖以最清晰的思路去講明白這個事情。
2022-10-19 15:22:552848 LIO-SAM 提出了一個利用GT-SAM的緊耦合激光雷達慣導里程計的框架。實現了高精度、實時的移動機器人的軌跡估計和建圖。
2022-10-31 09:25:493460 相機和激光雷達之間的時間戳同步問題一直是實時跑SLAM的先決條件。本文試圖以最清晰的思路去講明白這個事情。
2022-11-28 16:08:042437 本文提出了一種新的直接視覺里程計算法,利用360度相機實現魯棒的定位和建圖。本系統使用球面相機模型來處理無需校正的等距柱狀圖像,擴展稀疏直接法視覺里程計(DSO,direct sparse odometry),從而實現全方位感知。
2022-12-14 14:53:431411 通常激光雷達可以分為兩大類:機械式激光雷達和固態激光雷達。機械式激光雷達采用機械旋轉部件作為光束掃描的實現方式,可以實現大角度掃描,但是裝配困難、掃描頻率低。
2023-02-21 11:18:555197 方案(ORB SLAM)、基于激光雷達的里程計方案(Hector SLAM)、基于IMU的里程計方案,以及多傳感器融合的方案。
2023-04-19 10:17:523106 摘要:本文主要分析輪式移動機器人的通用里程計模型,并以兩輪差速驅動機器人的里程計計算為案例,給出簡化后的兩輪差速驅動機器人里程計模型。
2023-04-19 10:16:313651 論文提出了PVO,這是一種新的全景視覺里程計框架,用于實現場景運動、幾何和全景分割信息的更全面建模。
2023-05-09 16:51:582680 
激光雷達即激光探測及測距系統,是通過發射激光束來探測目標位置、速度等特征量的雷達系統。按掃描維度,激光雷達可分為一維激光雷達、二維激光雷達和三維激光雷達。
2023-05-10 09:58:3310062 
受簡化慣性傳感器系統(RISS)[23]的啟發,我們開發了視覺慣性車輪里程計(VIWO)。具體而言,我們將MSCKF中的系統模型重新設計為3DRISS,而不是INS,使用里程表、3軸陀螺儀和2軸(向前和橫向)加速計的單通道速度測量。
2023-06-06 14:30:422365 
激光雷達在自動駕駛應用中主要用來探測道路上的障礙物信息,把數據和信號傳遞給自動駕駛的大腦,再做出相應的駕駛動作,但室外常見的干擾因素如雨、霧、雪、粉塵、高低溫等對激光雷達的識別造成了極大的影響。因此
2023-07-14 11:11:305800 通過在每一幀掃描的開始和結束時刻聯合優化兩個姿勢,并根據時間戳進行插值,使掃描進行彈性變形以與地圖(白點)對齊,從而創建連續時間掃描到地圖的里程計。圖片最下面下面說明軌跡具有掃描內姿勢的連續性和掃描之間的不連續性。
2023-08-02 15:29:182122 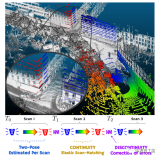
簡述激光雷達的結構原理分類及特點 TIM320激光雷達的工作原理? 激光雷達是一種高精度的探測裝置,可以在三維空間中進行高精度的距離測量和空間信息采集。激光雷達的主要結構包括光源、掃描系統、接收系統
2023-08-22 16:45:304493 測量精度高、方向性好、快速建圖等優點。但也存在一定的挑戰與缺點,比如:激光雷達在室內環境中掃描時,會遇到玻璃透光或反射,如果激光雷達檢測能力不強,就會造成漏檢、錯
2023-08-25 08:25:571626 
3D激光雷達在無人駕駛車輛的定位、路徑規劃、決策、感知等方面有著重要的作用。2022-2025年之間預計絕大部分的主機廠會量產上激光雷達,從國際上看,沃爾沃和Luminar宣布量產,國內蔚來選擇圖達通的激光雷達作為ET7的標配。
2023-10-30 18:14:061318 
單線激光雷達和多線激光雷達區別? 單線激光雷達和多線激光雷達是兩種常用的激光雷達技術。它們在激光的發射方式、數據采集、成像分辨率和應用場景等方面存在著很大的區別。 首先,單線激光雷達是指激光雷達只
2023-12-07 15:48:336715 SLAM算法運行的重要傳感器。基于激光雷達的SLAM算法,對激光雷達SLAM總體框架進行介紹,詳細闡述前端里程計、后端優化、回環檢測、地圖構建模塊的作用并總結所使用的算法;按由2D到 3D,單傳感器到多傳感器融合的順序,對經典的具有代表性的開源算法進行描述和梳理歸納;介紹常用的開源數據集,以
2024-11-12 10:30:253458 
如何讓多相機視覺SLAM系統更易于部署且對環境更具魯棒性?本文提出了一種適用于任意排列多相機的通用視覺里程計系統。在KITTI-360和MultiCamData數據集上驗證了該方法對于任意放置相機的魯棒性。與其他立體和多相機視覺SLAM系統相比,該方法獲得了更高的位姿估計精度,具有更好的泛化能力。
2024-12-13 11:22:401236 
針對具有挑戰性的光照條件和惡劣環境,本文提出了LIR-LIVO,這是一種輕量級且穩健的激光雷達-慣性-視覺里程計系統。通過采用諸如利用深度與激光雷達點云關聯實現特征的均勻深度分布等先進技術,以及利用
2025-04-28 11:18:06895 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論