") 基于單個(gè)全景相機(jī)的視覺里程計(jì)
基于單個(gè)全景相機(jī)的視覺里程計(jì)

摘要
本文提出了一種新的直接視覺里程計(jì)算法,利用360度相機(jī)實(shí)現(xiàn)魯棒的定位和建圖。本系統(tǒng)使用球面相機(jī)模型來處理無需校正的等距柱狀圖像,擴(kuò)展稀疏直接法視覺里程計(jì)(DSO,direct sparse odometry),從而實(shí)現(xiàn)全方位感知。將建圖和優(yōu)化算法應(yīng)用用于新模型后,可以在局部窗口中對(duì)含內(nèi)、外參在內(nèi)的相機(jī)參數(shù)以及三維建圖進(jìn)行聯(lián)合優(yōu)化。此外,我們?cè)谡鎸?shí)世界和大規(guī)模模擬場(chǎng)景中對(duì)所提出的算法進(jìn)行了定性和定量的評(píng)估。大量實(shí)驗(yàn)表明,我們的系統(tǒng)達(dá)到了SOTA的結(jié)果。
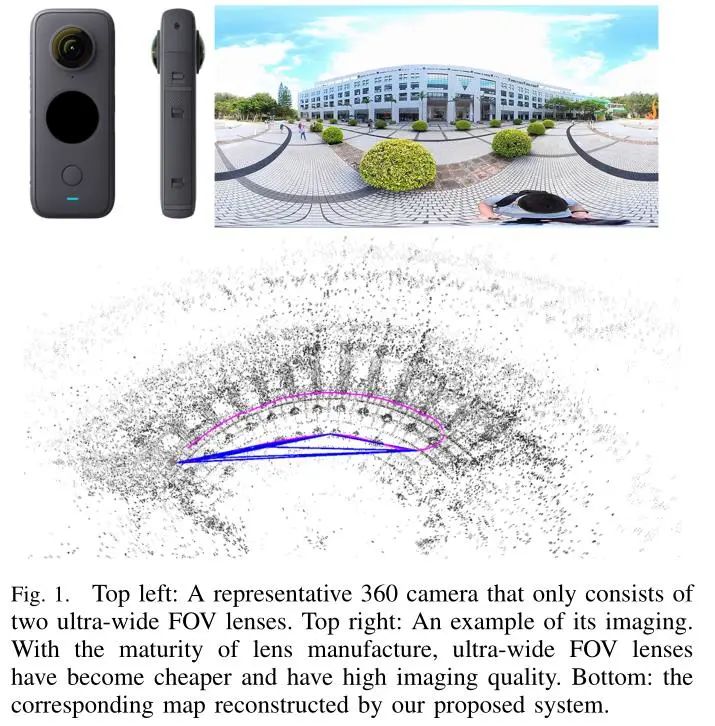
圖1 左上方圖中是僅由兩個(gè)超寬視場(chǎng)鏡頭組成的典型全景相機(jī)。右上角是該360相機(jī)成像的例圖。隨著透鏡制造行業(yè)的成熟,超寬視野透鏡變得更便宜,成像質(zhì)量也更高。下方的圖是由本文中360VO系統(tǒng)重建的地圖。
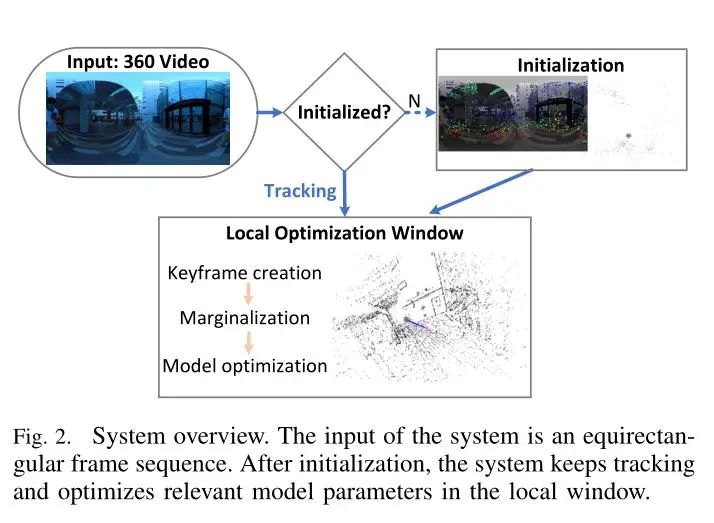
圖2 360VO系統(tǒng)概覽。該系統(tǒng)的輸入是一串等距柱狀的幀序列。初始化后,系統(tǒng)在局部窗口中跟蹤并優(yōu)化相關(guān)模型參數(shù)。
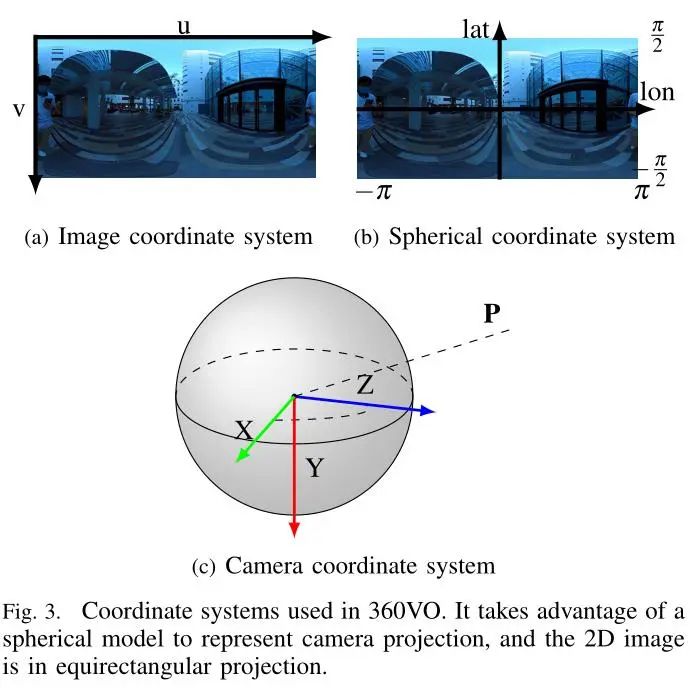
圖3 上圖顯示的是360VO的坐標(biāo)系,它利用了球面模型的優(yōu)點(diǎn)來表示相機(jī)投影。此外,2D圖像是等距柱狀投影。
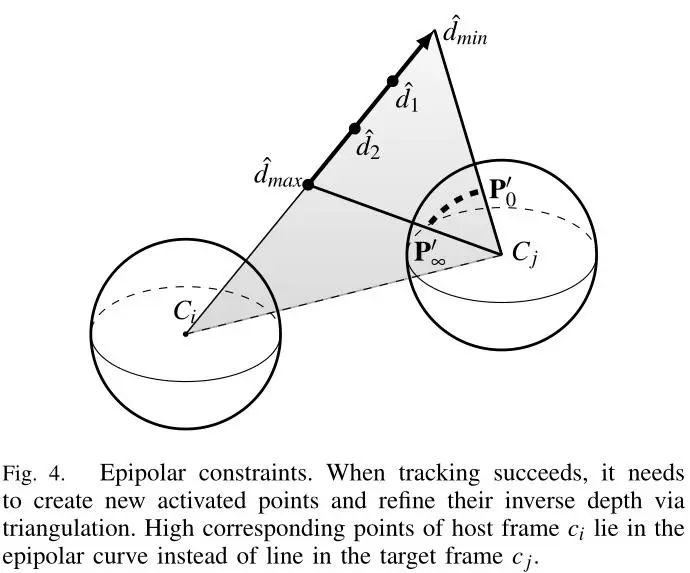
圖4 極線約束。當(dāng)成功追蹤時(shí)需要?jiǎng)?chuàng)建新的激活點(diǎn),并通過三角化來細(xì)化它們的逆深度。主幀Ci的高對(duì)應(yīng)點(diǎn)位于極線曲線上,而非位于目標(biāo)幀Cj中的直線上。
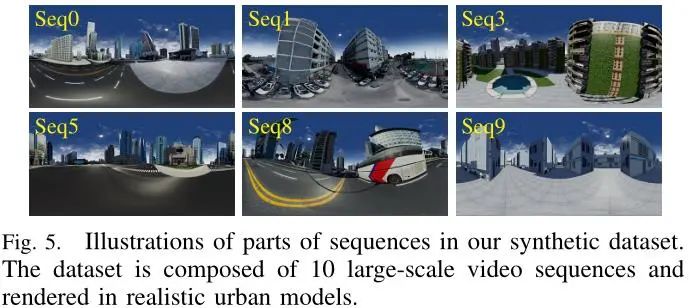
圖5 合成數(shù)據(jù)集中部分序列的代表幀。該合成數(shù)據(jù)集是在真實(shí)的城市模型中渲染得到的,由10個(gè)大型視頻序列組成。
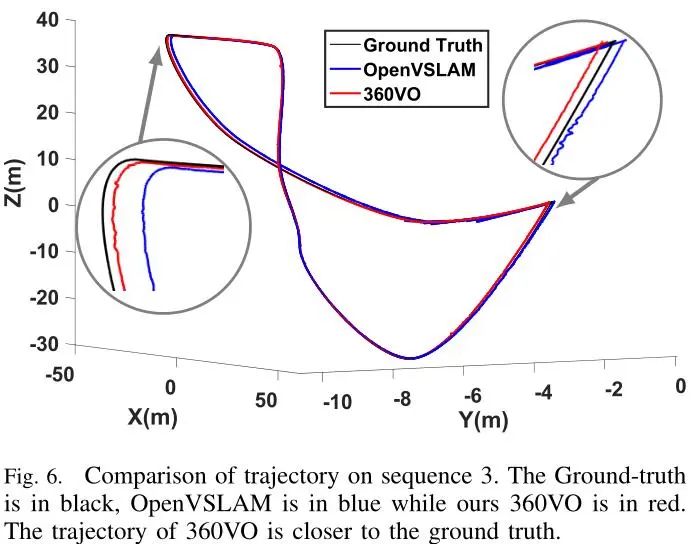
圖6 基于序列3的軌跡比較。圖中黑色曲線表示Ground-truth,藍(lán)色曲線表示OpenVSLAM得到的軌跡,紅色曲線表示本文提出的360VO得到的軌跡。結(jié)果顯示360VO的軌跡更接近于真值。
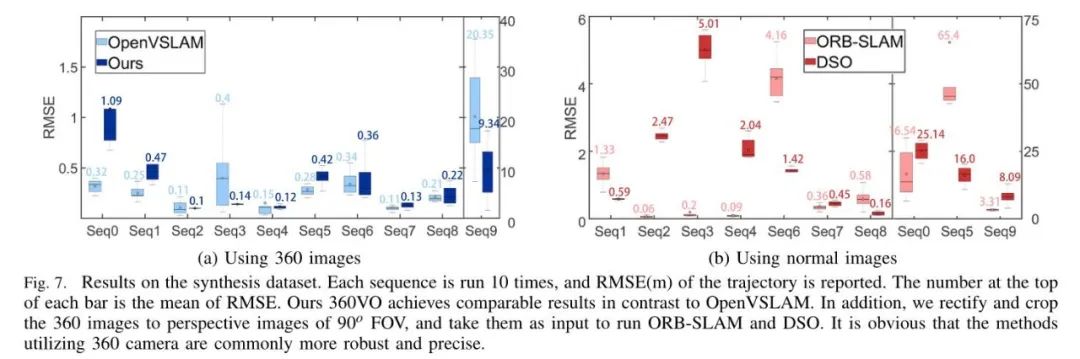
圖7 上圖是合成數(shù)據(jù)集得到的的結(jié)果。每個(gè)序列運(yùn)行10次,得到軌跡的均方根誤差(RMSE,Root Mean Square Error)。圖中每個(gè)柱形頂部的數(shù)字是均方根誤差的平均值。與OpenVSLAM相比,我們的360VO取得了可觀的結(jié)果。此外,我們將360°的圖像校正并裁剪為90°視場(chǎng)的透視圖像,并將其作為運(yùn)行ORB-SLAM和DSO的輸入。顯然,利用360相機(jī)的方法通常更魯棒、精度更高。
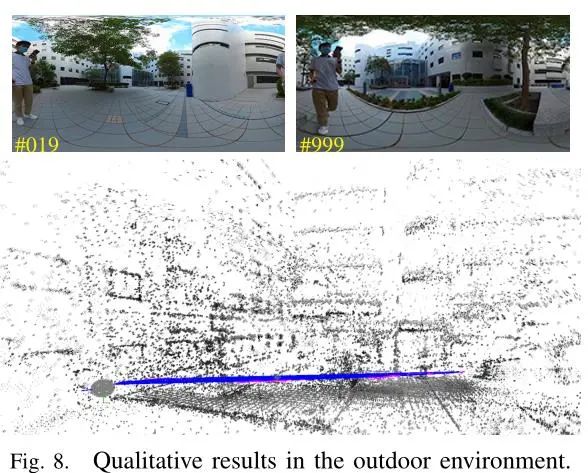
圖8 360VO在室外環(huán)境中測(cè)試的定性結(jié)果
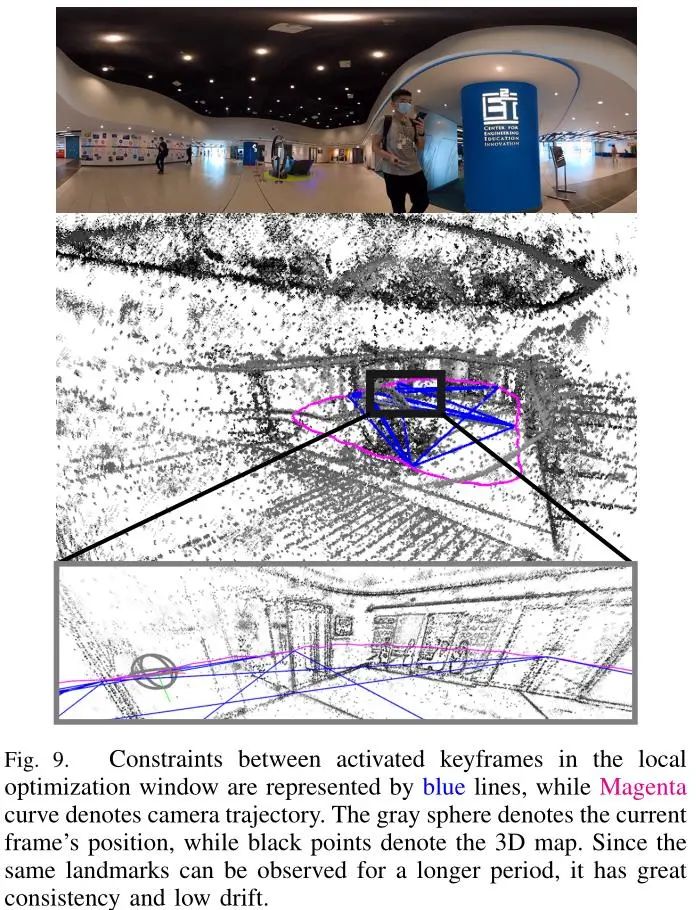
圖9 圖中藍(lán)色線表示局部?jī)?yōu)化窗口中激活關(guān)鍵幀間的約束,品紅色曲線表示相機(jī)軌跡。灰色的球體表示當(dāng)前幀的位置,而黑色的點(diǎn)表示3D地圖。由于同一個(gè)地標(biāo)可以被長(zhǎng)時(shí)間地觀測(cè)到,本文中算法得到的結(jié)果具有較好的一致性和較低的漂移。
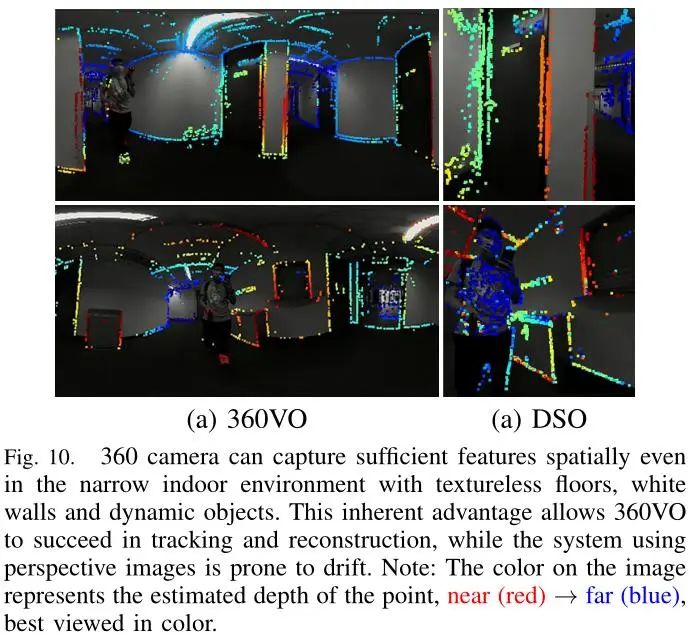
圖10 即使在有著無紋理地板、白色墻壁和動(dòng)態(tài)物體的狹窄的室內(nèi)環(huán)境中,360相機(jī)也能在空間上捕捉到足夠的特征。這種固有的優(yōu)勢(shì)使得360VO能夠成功地跟蹤和建圖,而使用透視圖像的系統(tǒng)則容易產(chǎn)生漂移。注:圖像上的顏色表示點(diǎn)的估計(jì)深度,近(紅色)→遠(yuǎn)(藍(lán)色)
審核編輯 :李倩
-
算法
+關(guān)注
關(guān)注
23文章
4784瀏覽量
98044 -
相機(jī)
+關(guān)注
關(guān)注
5文章
1578瀏覽量
55798
原文標(biāo)題:360VO:基于單個(gè)全景相機(jī)的視覺里程計(jì)
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
雙目立體視覺相機(jī)產(chǎn)品介紹

機(jī)器視覺系統(tǒng)之工業(yè)相機(jī)解讀

工業(yè)視覺相機(jī)的應(yīng)用有哪些

MonoDream框架賦能機(jī)器人僅憑單目相機(jī)重構(gòu)全景與未來

全景相機(jī)FCC ID認(rèn)證測(cè)試

【CIE全國(guó)RISC-V創(chuàng)新應(yīng)用大賽】+基于MUSE Pi Pro的3d激光里程計(jì)實(shí)現(xiàn)
UV紫外相機(jī)在工業(yè)視覺檢測(cè)中的應(yīng)用
短波紅外相機(jī)在工業(yè)視覺檢測(cè)中的應(yīng)用
RGB+EVS視覺融合相機(jī):事件相機(jī)的革命性突破?
這一重量級(jí)玩家入局,全景相機(jī)越來越卷?
工業(yè)相機(jī)圖像采集卡:機(jī)器視覺的核心樞紐

【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
一種新型激光雷達(dá)慣性視覺里程計(jì)系統(tǒng)介紹




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論