探測(cè)物體的一種穩(wěn)妥的方法就是和物體進(jìn)行物理的接觸。接觸可能是物體探測(cè)的最常見的形式,而且通常只用簡(jiǎn)單的開關(guān)就可以實(shí)現(xiàn)。在這里,我們將介紹一些接觸方式,其中包括“軟接觸”技術(shù),使用這項(xiàng)技術(shù)的機(jī)器人能通過細(xì)微的接觸來進(jìn)行探測(cè)。
2014-11-18 10:06:47 1658
1658 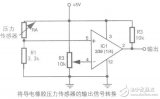
前言 我們?cè)赮ouTube上看到有人使用機(jī)械臂實(shí)現(xiàn)物體跟蹤功能的視頻時(shí),深受啟發(fā),對(duì)這個(gè)項(xiàng)目產(chǎn)生了濃厚的興趣,并決定獨(dú)立開發(fā)一個(gè)類似的程序。 我們的目標(biāo)是開發(fā)一個(gè)能夠準(zhǔn)確識(shí)別和跟蹤物體的機(jī)械臂系統(tǒng)
2023-05-24 18:20:272705 
利用ModelArts框架可以完成圖像分類、物體檢測(cè)、預(yù)測(cè)分析、聲音分類、文本分類等功能。介紹如何使用ModelArts完成圖像分類、物體檢測(cè)、自我學(xué)習(xí)等功能運(yùn)用。
2023-07-10 16:26:122704 
物體是如何起電的?靜電的干擾及其抑制措施
2021-03-11 06:01:24
求大神指導(dǎo),怎么使用labview用USB攝像頭讀取記錄物體運(yùn)動(dòng)軌跡(讀取已完成,就是不懂怎么在畫面上記錄物體運(yùn)動(dòng)過后的軌跡)!!! 求大神指導(dǎo),不勝感激!
2017-08-24 20:34:47
簡(jiǎn)單介紹要求如下,通過一個(gè)傳感器來捕捉一個(gè)運(yùn)動(dòng)物體,獲得運(yùn)動(dòng)的軌跡,并且驅(qū)動(dòng)一個(gè)電機(jī)來和移動(dòng)物體,同步轉(zhuǎn)動(dòng),(可在運(yùn)動(dòng)物體上面攜帶發(fā)射信號(hào)源方便捕捉信號(hào)),當(dāng)然如果能不通過發(fā)射源,能直接捕捉運(yùn)動(dòng)信號(hào)更好,作為項(xiàng)目開發(fā),聯(lián)系qq,908648941,或者直接留言
2014-01-11 22:54:31
`1.利用USB攝像頭采集連續(xù)圖像。2.使用機(jī)器識(shí)別物體顏色與樣本顏色是否一致。3.標(biāo)定物體及獲取物體位置信息。`
2019-04-14 13:25:23
工智能攝像頭,自帶很多ai算法,有很多應(yīng)用的場(chǎng)景,今天我來教大家如何使用open_mv實(shí)現(xiàn)物體追蹤、色塊識(shí)別,并且把識(shí)別到的物品坐標(biāo)信息通過串口傳輸給單片機(jī)等處理器。如果你還沒用過OpenMV,建議先簡(jiǎn)單入門IDE軟件,然后進(jìn)入到我們的主題:材料準(zhǔn)備OpenMV攝像頭一個(gè)(不限版本)sd卡一張(內(nèi)存不限,實(shí)在
2021-11-30 06:59:31
`我先制作個(gè)模板,框的roi區(qū)域是水平豎直的矩形,模板中心也在物體的中心,可是為什么重新識(shí)別以后,roi區(qū)域也跟著旋轉(zhuǎn)了,而且中心跟物體中心也對(duì)不上了,有沒有懂得大佬解釋一下,教我如何正確使用模板匹配啊?`
2021-03-19 16:53:13
labview進(jìn)行物體測(cè)量如何使用標(biāo)定塊進(jìn)行標(biāo)定?
2019-08-04 12:18:01
由于參加了這次TI杯電賽,并取得了不錯(cuò)的省二成績(jī),因此將自己的心得分享出來,供大家學(xué)習(xí)與提升,也是自我的一次總結(jié)。stm32通過openmv模塊實(shí)現(xiàn)非接觸物體尺寸形態(tài)測(cè)量?jī)?nèi)容包括:任務(wù)摘要系統(tǒng)結(jié)構(gòu)圖
2022-01-11 07:43:14
unity中用鼠標(biāo)控制物體實(shí)現(xiàn)縮放、平移、旋轉(zhuǎn)
2019-10-08 12:16:12
傳感器ADXL345驅(qū)動(dòng)到開發(fā)板;(3)將OpenCV移植到開發(fā)板;4,預(yù)計(jì)成果:實(shí)現(xiàn)物體跌落過程全稱記錄,并保存物體跌落前30秒視頻和后30秒視頻;通過wifi發(fā)送到云端。5,預(yù)計(jì)實(shí)際使用場(chǎng)景:制作
2020-10-29 14:36:21
物體模塊從雙色、三色到較為復(fù)雜的多色進(jìn)行測(cè)試自動(dòng)跟蹤[跟蹤物體移動(dòng)、追蹤物移動(dòng)]4.寫出每一步的實(shí)驗(yàn)結(jié)果、分享代碼和資料共同學(xué)習(xí)提高。
2017-03-20 18:09:16
恢復(fù) 本文介紹的新技術(shù)針對(duì)單幀圖像融合技術(shù)進(jìn)行了補(bǔ)充和改進(jìn),研究小組通過調(diào)整傳感器電路來防止圖像過度曝光。當(dāng)單個(gè)圖像傳感器的電容充滿時(shí),高速相機(jī)通過控制器復(fù)位傳感器電容。在曝光期間,當(dāng)傳感器像素的電容
2016-02-15 14:03:02
為什么激光掃描能還原物體的外形
2023-10-30 07:06:10
` nao機(jī)器人可識(shí)別大量物體和自動(dòng)語(yǔ)音識(shí)別,并可通過Choregraphe軟件保存物體信息和語(yǔ)音。此后,當(dāng)它再次看到已保存的物體時(shí)或需要與人交流的時(shí)候,就會(huì)自主地進(jìn)行識(shí)別并說出其名稱或交流。這就
2015-02-13 14:09:50
使用LabVIEW進(jìn)行物體追蹤圖像處理分析 近年來,伴隨著科技的進(jìn)步,生物科技也成為一個(gè)相當(dāng)熱門的研究,其中包含了藥物學(xué)、行為科學(xué)…等多項(xiàng)領(lǐng)域。而不論是哪一項(xiàng)領(lǐng)域的研究,都必須由大量的動(dòng)物實(shí)驗(yàn)來探討
2022-02-22 20:10:34
解決方案前言光電傳感器作為檢測(cè)物體的重要技術(shù)手段,在工業(yè)自動(dòng)化,智能化領(lǐng)域已廣泛應(yīng)用,它可以說是設(shè)備上的眼睛,如若失靈,將會(huì)影響整個(gè)設(shè)備的運(yùn)作。1.應(yīng)用問題光電傳感器是通過光的性質(zhì)來檢測(cè)物體的有無
2020-03-17 10:02:44
其實(shí)對(duì)于產(chǎn)品設(shè)計(jì)師而言,光線追蹤技術(shù)并不陌生。簡(jiǎn)單的說,是自三維(3D)圖形誕生以來圖形技術(shù)領(lǐng)域最重要的進(jìn)步之一,而且它即將從高深的電影和廣告領(lǐng)域轉(zhuǎn)向移動(dòng)、可穿戴和汽車等嵌入式領(lǐng)域,作為全新的、更有
2020-11-02 08:21:53
技術(shù),Digital Light Field。AR設(shè)備使用二維顯示屏呈現(xiàn)虛擬信息,因此真假很容易分辨;而MR設(shè)備直接向視網(wǎng)膜投射整個(gè)4維光場(chǎng),所以用戶從Magic Leap看到的物體和看真實(shí)的物體,從
2016-12-23 23:25:30
去除照片上的物體
2008-07-12 17:26:09
步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的角度。通過系統(tǒng)起始點(diǎn)A的坐標(biāo)和步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的角度,可求得運(yùn)動(dòng)控制下一點(diǎn)B的坐標(biāo)。求得B點(diǎn)坐標(biāo)后,控制懸掛物體向該點(diǎn)作直線運(yùn)動(dòng),同時(shí)搖臂作逆時(shí)針旋轉(zhuǎn)90°,以保證下一個(gè)檢測(cè)交點(diǎn)在其180
2011-08-19 09:50:42
我我想把4cm左右的物體,通過顏色傳感器識(shí)別顏色除綠色以外的物體。啟動(dòng)小型電機(jī)電機(jī)旋轉(zhuǎn)半圈或者一圈把物體向左右分開
2020-11-25 19:10:02
怎么通過OPENMV來識(shí)別物體的顏色
2023-10-12 08:05:05
怎么用 OV5640進(jìn)行識(shí)別特定顏色物體
2023-10-13 06:04:00
機(jī)器人接觸式物體探測(cè)技術(shù)電路設(shè)計(jì)
2020-03-02 11:06:28
對(duì)運(yùn)動(dòng)過程中的物體進(jìn)行實(shí)時(shí)識(shí)別與追蹤。對(duì)于1080p的圖像理論速度可以達(dá)到330幀每秒對(duì)于720p的圖像理論速度則可以達(dá)到550幀每秒。鏡頭可以穿過熱成像儀清楚的拍出人像圖像。這項(xiàng)技術(shù)的開發(fā)意味著能夠遠(yuǎn)程
2018-08-21 11:23:45
物體的面積和周長(zhǎng)。% 使用這些結(jié)果可以形成一個(gè)表示對(duì)象圓度的簡(jiǎn)單度量:%%metric = 4*pi*area/perimeter^2.% % 此度量值僅對(duì)圓等于一,對(duì)任何其他形狀小于一。% 可以通過
2020-04-02 10:43:42
激光測(cè)位移測(cè)量的位移是物體的位移?
2015-08-21 10:10:34
我們知道,在相機(jī)選型的時(shí)候,需要考慮是否需要拍攝運(yùn)動(dòng)的物體,若拍攝運(yùn)動(dòng)的物體時(shí),選型的時(shí)候需要考慮相機(jī)芯片的類型,需要考慮相機(jī)芯片是否是全局曝光模式的,卷簾曝光拍攝運(yùn)動(dòng)的物體時(shí),無論曝光多短,都會(huì)
2018-12-10 09:58:56
近年來巨頭們都在積極布局眼球追蹤技術(shù),除了眼球追蹤在人機(jī)交互的巨大潛能以外,眼球追蹤技術(shù)還可能成為VR和AR的基礎(chǔ)性技術(shù),為AR的VR的發(fā)展提供必要的支持。目前我們的人機(jī)交互還主要靠的是鍵盤、鼠標(biāo)
2019-10-15 06:52:40
問題如題:如何檢測(cè)有物體通過一個(gè)5cm大小的孔,有什么方法可以做到?
2017-07-13 15:04:55
上說已經(jīng)整合了動(dòng)態(tài)卡爾曼濾波,在網(wǎng)上查了很多振動(dòng)模塊,可惜全是觸發(fā)器,不能獲得具體的振動(dòng)數(shù)據(jù),想請(qǐng)教大家,通過MPU6050,能不能采集到一個(gè)物體振動(dòng)的波形?能不能通過算法實(shí)現(xiàn)?
2019-05-16 06:36:10
有個(gè)問題想請(qǐng)教下各位大蝦能否用超聲波測(cè)距 實(shí)現(xiàn)活動(dòng)物體 與 非活動(dòng)物體的判別呢? 我最初的想法是 用超聲波對(duì)同一物體進(jìn)行兩次測(cè)距 之后比較兩次測(cè)距結(jié)果 進(jìn)而判別活動(dòng)物體與非活動(dòng)物體 但是 測(cè)距時(shí)間確實(shí)不好控制 希望各位大蝦 給點(diǎn)意見哈 謝謝
2011-04-25 10:17:57
當(dāng)我測(cè)量透明物體的范圍,如玻璃或丙烯酸,具有近背景時(shí),傳感器測(cè)量背景而不是物體。 我可以使用一些設(shè)置來處理這個(gè)問題嗎?可能與串?dāng)_設(shè)置有關(guān)? 此致赫里#vl6180x以上來自于谷歌翻譯以下為原文
2018-09-21 16:58:25
提出一種基于振動(dòng)敲擊來檢測(cè)軟質(zhì)物體硬度的方法。它利用PVDF 壓力薄膜傳感器, 檢測(cè)振動(dòng)源施加在軟質(zhì)物體上的動(dòng)態(tài)壓力及彈性形變, 通過提取波形的特征量及對(duì)特征量的主成分分
2009-07-02 10:19:46 7
7 通過對(duì)平面物體拍攝多幅圖象,利用視覺標(biāo)定技術(shù),求出物體在世界坐標(biāo)系下的坐標(biāo),消除了由于攝像頭參數(shù)不同對(duì)圖象拼接造成的影響,實(shí)現(xiàn)了在世界坐標(biāo)系下構(gòu)造實(shí)際物體整
2009-08-07 09:41:1620 基于斷裂面匹配的破碎物體拼接技術(shù):該文研究了曲面三角網(wǎng)格模型頂點(diǎn)法矢、主曲率和主方向的計(jì)算方法,分析了曲面上點(diǎn)的類型,提出了一種基于斷裂面匹配的破碎物體拼接方法
2009-10-29 12:55:064 MATLAB圖像識(shí)別物體計(jì)數(shù):MATLAB 圖像識(shí)別物體計(jì)數(shù),將圖像中的物體識(shí)別出來,并進(jìn)行計(jì)數(shù),SIMULINK編程方法。文件列表testpart.jpg 測(cè)試圖片readimg.m 讀入圖像程序imagecount.mdl 圖
2010-02-08 14:40:29248 摘要:在工業(yè)生產(chǎn)中,經(jīng)常需要記錄沿一定方向移動(dòng)的各種物體的數(shù)目,與此同時(shí),沿相反方向移動(dòng)的物體.不應(yīng)當(dāng)引起計(jì)數(shù)機(jī)構(gòu)的動(dòng)作。在農(nóng)業(yè)中,可用它記錄牲畜和家禽的數(shù)目
2010-05-30 09:15:2188 為提高視頻運(yùn)動(dòng)物體提取的準(zhǔn)確性,提出了一種新的基于運(yùn)動(dòng)矢量信息的視頻運(yùn)動(dòng)物體提取方法。將與運(yùn)動(dòng)矢量信息相關(guān)的分割因子用于運(yùn)動(dòng)物體提取的判據(jù),然后通過對(duì)每幀圖
2010-11-26 16:05:130
檢測(cè)物體轉(zhuǎn)動(dòng)電路
2009-02-09 12:54:33725 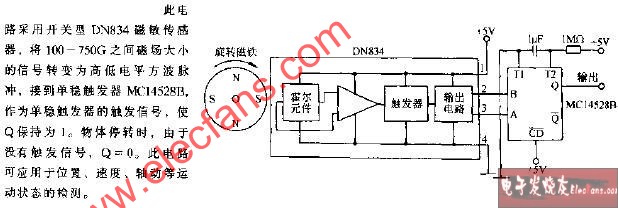
物體振動(dòng)位移檢測(cè)電路
2009-02-09 14:08:14963 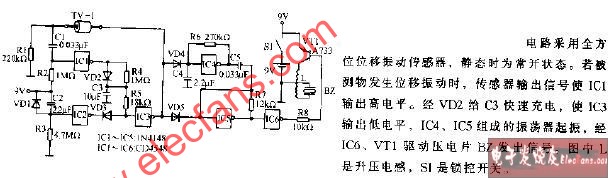
樟狀物體圓周測(cè)量電路
2009-02-09 16:22:16741 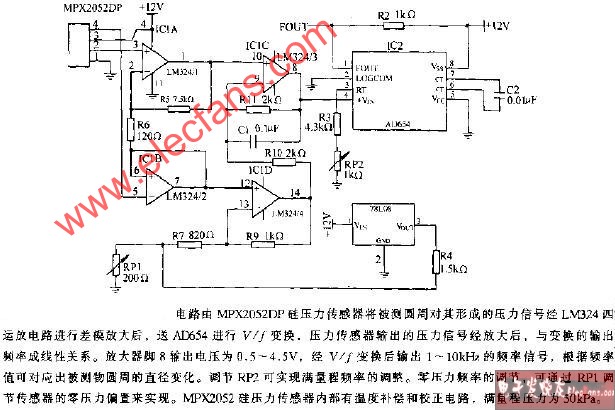
檢測(cè)物體旋轉(zhuǎn)方向及轉(zhuǎn)速的電路
2009-04-24 21:48:372068 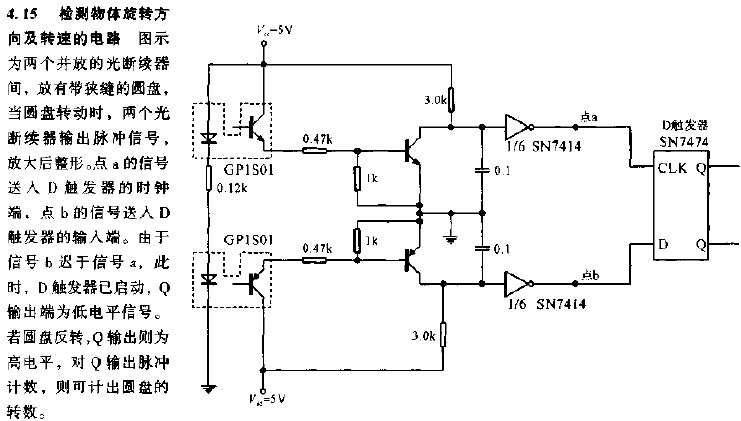
基于移動(dòng)基站對(duì)運(yùn)動(dòng)物體的跟蹤研究,通過對(duì)運(yùn)動(dòng)物體軌跡的檢測(cè)、提取、識(shí)別和跟蹤,獲得了運(yùn)動(dòng)物體的運(yùn)動(dòng)參數(shù)以及運(yùn)動(dòng)物體的軌跡,并對(duì)其參數(shù)進(jìn)行進(jìn)一步處理與分析,實(shí)現(xiàn)了對(duì)運(yùn)動(dòng)目
2012-03-09 14:46:2456 微軟在AR或VR領(lǐng)域?qū)⒂瓉碇卮箫w躍?近日,微軟被爆出眼部追蹤最新專利。而這一專利在未來或?qū)?yīng)用在AR眼鏡HoloLens和VR頭盔?
2016-12-13 19:02:591066 去年 12 月份的時(shí)候,美國(guó)專利局公布了微軟的一項(xiàng)可以實(shí)現(xiàn)對(duì)象追蹤的 AR 專利,但是微軟在 AR 領(lǐng)域的布局遠(yuǎn)遠(yuǎn)不止于此。最近,美國(guó)專利局一連通過了微軟的三個(gè) AR 專利。以下VR科技網(wǎng)為大家介紹三個(gè)專利的內(nèi)容。
2017-02-08 09:16:31737 
大數(shù)據(jù)時(shí)代下隨著計(jì)算機(jī)數(shù)據(jù)處理能力的提高,傳感技術(shù)、音頻技術(shù)、自動(dòng)化控制技術(shù)得到不斷地發(fā)展,視頻幀和圖像信息作為人類通過客觀世界獲得信息的主要來源之一更是得到了諸多的重視。如今計(jì)算機(jī)視覺作為當(dāng)下研究
2017-12-07 09:45:140 今日,谷歌Research團(tuán)隊(duì)在網(wǎng)站上發(fā)表博客稱,為安卓上的Motion Stills(視頻捕捉和觀看app)增加了全新的AR模式。在AR模式下,用戶只需點(diǎn)擊屏幕就可以將有趣的虛擬3D物體放置在靜止
2018-02-08 13:41:205761 目前,對(duì)物體的重量進(jìn)行測(cè)量主要依據(jù)兩種基本原理。一是利用力學(xué)中的杠桿平衡原理,二是利用各種傳感器將物體的重量信息轉(zhuǎn)化成電信號(hào),再對(duì)此電信號(hào)進(jìn)行分析處理提取該物體的重量信息。前者適用范圍廣,量程大,是一種經(jīng)濟(jì)的方法,但測(cè)量精度有限且需人工完成,因此,這種方法無法實(shí)現(xiàn)實(shí)時(shí)動(dòng)態(tài)測(cè)量。
2019-04-02 09:21:004342 
機(jī)屏幕里看到相關(guān)動(dòng)畫……這些有趣的應(yīng)用,都是QQ新推出的QQ-AR功能——以手機(jī)為媒介,人與物體間產(chǎn)生了有趣的互動(dòng)。
2018-09-03 15:33:277919 法國(guó)化妝品巨頭歐萊雅很早便開始利用AR技術(shù)為消費(fèi)者帶來新的購(gòu)物體驗(yàn)。今年2月份,歐萊雅曾與Modiface合作,推出了AR染發(fā)應(yīng)用Style My Hair,讓用戶可以通過手機(jī)進(jìn)行AR試色。而后,歐萊雅于今年三月收購(gòu)了AR美妝技術(shù)創(chuàng)企Modiface。
2018-11-30 11:36:411367 如果你至今都不確定耐克(Nike)是否認(rèn)為AR對(duì)鞋品而言十分重要,現(xiàn)在我們可以給你呈上最新證據(jù)。這家公司正在SNKRS應(yīng)用程序中利用AR技術(shù),而當(dāng)你在12月8日正式選購(gòu)之前,你可以在現(xiàn)實(shí)空間中感受
2018-11-30 11:40:202228 據(jù)報(bào)道,半導(dǎo)體巨頭英偉達(dá)首次推出“廚房達(dá)人”機(jī)器人,它通過AI和深度學(xué)習(xí)檢測(cè)和跟蹤物體,記錄廚房里門和抽屜的位置,甚至可以自己開關(guān)抽屜和門。
2019-02-04 17:29:001100 據(jù)外媒Onmsft報(bào)道,借助Azure認(rèn)知服務(wù)(Cognitive Services),微軟正在使用AI和云的強(qiáng)大功能,允許應(yīng)用程序處理自然語(yǔ)言、識(shí)別物體,甚至是人。我們已經(jīng)在Bing Visual
2019-02-05 11:11:002681 據(jù)外媒Onmsft報(bào)道,借助Azure認(rèn)知服務(wù)(Cognitive Services),微軟正在使用AI和云的強(qiáng)大功能,允許應(yīng)用程序處理自然語(yǔ)言、識(shí)別物體,甚至是人。我們已經(jīng)在Bing Visual Search和Seeing AI這樣的應(yīng)用程序中看到了這些技術(shù)的強(qiáng)大功能。
2019-02-05 08:44:005389 8月14日消息,美國(guó)專利商標(biāo)局發(fā)布蘋果又一項(xiàng)眼球追蹤相關(guān)專利,與此前曝光的蘋果眼球追蹤專利不同,本專利中指出的技術(shù)不局限于AR/VR頭顯,也可以用在電腦等設(shè)備。 專利中寫到,這款眼球追蹤系統(tǒng)或采用
2019-08-15 14:19:583458 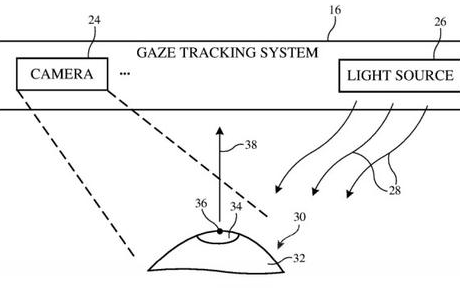
物體識(shí)別是基于觸控屏的標(biāo)簽識(shí)別交互系統(tǒng),由觸控屏和實(shí)物標(biāo)簽Marker,軟件底層識(shí)別程序和軟件上層效果程序,支持多個(gè)Marker同時(shí)顯示,將Marker嵌入或粘合到待識(shí)別物體的底部。
2020-03-12 10:37:096067 55寸物體識(shí)別甩屏觸摸桌 2018年3月,投石科技為四季沐歌提供2018年3月中國(guó)家電及消費(fèi)電子博覽會(huì)展會(huì)期間55寸物體識(shí)別甩屏觸摸桌的租賃服務(wù)。 進(jìn)入21世紀(jì),很多科技技術(shù)發(fā)展都在呈現(xiàn)快速發(fā)展的趨勢(shì),而且原本相互之間沒有交集的技術(shù),正在相互緊密的結(jié)合,
2020-04-14 16:09:422404 據(jù)外媒報(bào)道,增強(qiáng)顯示(AR)或混合現(xiàn)實(shí)(MR)體驗(yàn)通常指的是讓虛擬物體跟現(xiàn)實(shí)世界的東西同框,比如通過眼鏡或手機(jī)屏幕看到虛擬物體出現(xiàn)在現(xiàn)實(shí)世界里。
2020-05-12 09:28:36743 為了使機(jī)器人能看見物體并且抓取它,通常會(huì)配備像微軟Kinect這樣的深度感應(yīng)相機(jī)。盡管這種相機(jī)可能會(huì)受到透明或發(fā)光物體的影響,但來自卡耐基梅隆大學(xué)的科學(xué)家們已經(jīng)開發(fā)出了一種解決辦法。深度感應(yīng)相機(jī)的功能是將紅外線激光束射到物體上然后測(cè)量光從物體的輪廓反射回來及再反射至相機(jī)上感應(yīng)器所需要的時(shí)間。
2020-07-17 14:18:47824 在這項(xiàng)專利中,蘋果解決了一個(gè)有關(guān)「佩戴AR眼鏡的人如何與他們看到的虛擬環(huán)境互動(dòng)」的難題。當(dāng)我們使用iPhone或iPad作為AR取景器時(shí),用戶通常會(huì)點(diǎn)擊屏幕,與屏幕上顯示的物體進(jìn)行互動(dòng)。但如果是佩戴
2020-08-13 12:18:18680 的系統(tǒng),并將其命名為豪豬(Porcupine)。豪豬分子標(biāo)記系統(tǒng)可用于追蹤物體,即使是在射頻識(shí)別(RFID)標(biāo)簽或二維碼不適用的很小的物體上也可以用,同時(shí),它的標(biāo)簽可以通過便攜式設(shè)備在幾秒鐘內(nèi)進(jìn)行解碼。 RFID和二維碼目前已十分常見,這二者
2020-11-04 09:29:352476 華為發(fā)明的物體檢測(cè)方法,通過構(gòu)建跨域知識(shí)圖譜,可以捕捉到不同待檢測(cè)物體間的內(nèi)在關(guān)系,從而更加精確的進(jìn)行物體識(shí)別,在智能安防等復(fù)雜場(chǎng)景中有著極其重要的應(yīng)用。
2020-11-22 09:19:152811 抬頭顯示器的AR/VR可穿戴設(shè)備,該設(shè)備將搭載傳感器、電路等電子元件,包括方向朝內(nèi)和朝外的攝像頭傳感器,用于追蹤定位環(huán)境中的物體、表面,還能識(shí)別手勢(shì)和使用者的姿態(tài)。 細(xì)節(jié)方面,AR/VR頭顯可通過識(shí)別物體上的標(biāo)記來進(jìn)行定位,或是
2021-01-22 16:48:232637 物體識(shí)別是計(jì)算機(jī)視覺領(lǐng)域中的一項(xiàng)基礎(chǔ)研究,它的任務(wù)是識(shí)別出圖像中有什么物體,并報(bào)告出這個(gè)物體在圖像表示的場(chǎng)景中的位置和方向。目前物體識(shí)別方法可以歸為兩類:基于模型的或者基于上下文識(shí)別的方法,二維物體識(shí)別或者三維物體識(shí)別方法。
2021-03-27 09:22:5124290 
應(yīng)用在透明物體上。文中簡(jiǎn)要介紹透明物體的三維重建相關(guān)研究,圍繞從ⅹ恢復(fù)形狀、反向渲染技術(shù)、斷層攝影技術(shù)和直接光線測(cè)量這4個(gè)方面回顧了近些年來的主要研究工作,分析并指出當(dāng)前工作的優(yōu)缺點(diǎn)以及不同的應(yīng)用環(huán)境,展示
2021-04-21 14:21:374 將兩個(gè)特性一致的光敏電阻安裝在物體運(yùn)動(dòng)路徑的同一側(cè),相互間隔適當(dāng)距離。另一側(cè)相對(duì)位置分別安裝2個(gè)光源,使物體在光源和光敏電阻之間直線運(yùn)動(dòng)。采用如圖所示電路可以判斷物體運(yùn)動(dòng)方向。
2021-05-01 16:54:003254 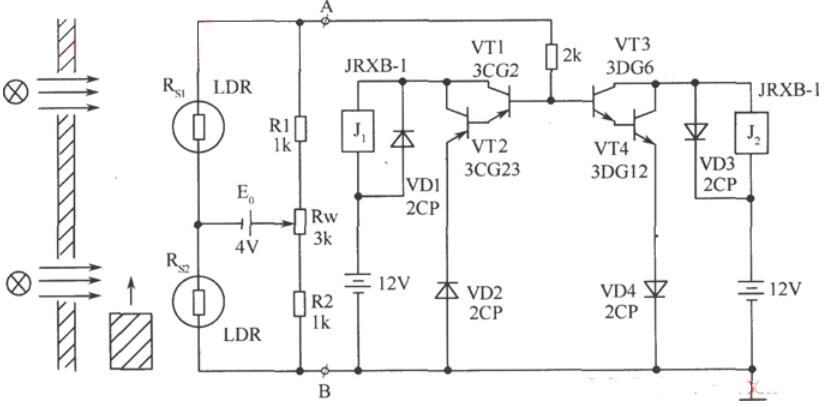
為提高復(fù)雜場(chǎng)景下基于關(guān)鍵點(diǎn)的平面物體跟蹤算法的魯棒性,提出一種融合光流的平面物體跟蹤算法檢測(cè)目標(biāo)物體與輸入圖像的關(guān)鍵點(diǎn)及其對(duì)應(yīng)描述符,由最近鄰匹配方法構(gòu)建目標(biāo)與圖像間關(guān)鍵點(diǎn)匹配集合,通過光流法構(gòu)建
2021-05-27 14:15:2814 這其實(shí)屬于比較成熟的領(lǐng)域。由于我們所有物體識(shí)別都只是計(jì)算物體在相機(jī)坐標(biāo)系下的位姿,但是,機(jī)器人操作物體需要知道物體在機(jī)器人坐標(biāo)系下的位姿。所以,我們先需要對(duì)相機(jī)的位姿進(jìn)行標(biāo)定。
2021-06-18 11:44:392783 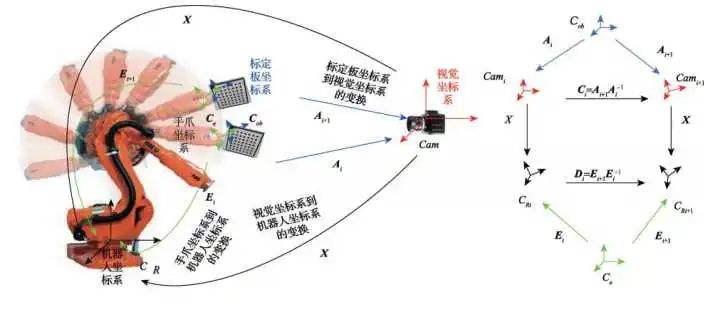
工智能攝像頭,自帶很多ai算法,有很多應(yīng)用的場(chǎng)景,今天我來教大家如何使用open_mv實(shí)現(xiàn)物體追蹤、色塊識(shí)別,并且把識(shí)別到的物品坐標(biāo)信息通過串口傳輸給單片機(jī)等處理器。如果你還沒用過OpenMV,建議先簡(jiǎn)單入門IDE軟件,然后進(jìn)入到我們的主題:材料準(zhǔn)備OpenMV攝像頭一個(gè)(不限版本)sd卡一張(內(nèi)存不限,實(shí)
2021-11-21 19:51:0329 我們提出了iNeRF,一個(gè)通過 “反轉(zhuǎn) ”神經(jīng)輻射場(chǎng)(NeRF)來進(jìn)行無網(wǎng)格姿勢(shì)估計(jì)的框架。NeRFs已經(jīng)被證明對(duì)合成真實(shí)世界場(chǎng)景或物體的逼真的新視圖非常有效。在這項(xiàng)工作中,我們研究了是否可以通過
2022-08-10 11:37:522000 基于CAD模型的物體姿態(tài)估計(jì):目前最先進(jìn)的物體6DoF姿態(tài)估計(jì)方法可以大致分為回歸和關(guān)鍵點(diǎn)技術(shù)。第一類方法直接將姿勢(shì)參數(shù)與每個(gè)感興趣區(qū)域(RoI)的特征進(jìn)行回歸。相反,后一類方法首先通過回歸或投票
2022-08-10 11:42:222236 紅外熱像技術(shù)可實(shí)現(xiàn)非接觸測(cè)溫,通過對(duì)物體表面的熱(溫度)分布成像與分析,快速發(fā)現(xiàn)物體的熱缺陷。
2022-09-01 10:30:361620 使用 OpenVINO? 工具套件進(jìn)行物體尺寸檢測(cè)
2023-01-03 09:45:161241 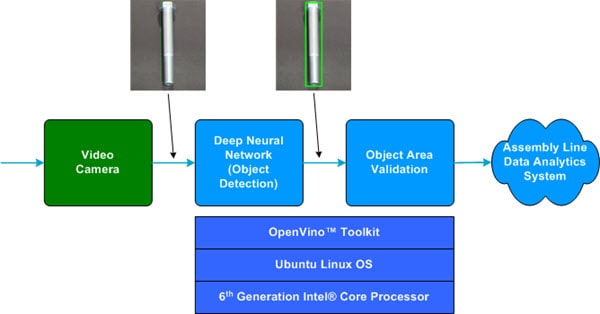
背部打光是指將光源放置在被測(cè)物體的后方,用于凸顯產(chǎn)品外形輪廓,可以在明亮的背景下創(chuàng)建物體的深色輪廓。
2023-05-19 14:11:231084 
隨著科技的快速進(jìn)步,智能識(shí)別技術(shù)的應(yīng)用越發(fā)廣泛,刷卡就能獲取詳細(xì)信息,移動(dòng)模型就能查看產(chǎn)品參數(shù),這種通過物聯(lián)網(wǎng)令牌實(shí)現(xiàn)創(chuàng)意展示的多媒體互動(dòng)展項(xiàng)即是展廳中常見的物體識(shí)別觸摸桌,那么智能交互物體識(shí)別觸摸
2022-02-20 14:51:061281 
技術(shù)和方法。視覺檢測(cè)視覺檢測(cè)是一種常用的檢測(cè)物體有無的方法,它利用相機(jī)或其他視覺傳感器來捕捉物體的圖像,然后使用計(jì)算機(jī)視覺技術(shù)來分析圖像以確定物體的有無。視覺檢測(cè)
2023-04-17 15:56:521554 
使用光電二極管或光敏電阻等光傳感器來感知物體發(fā)射或反射的光線。不同顏色的物體會(huì)吸收或反射不同波長(zhǎng)的光,顏色感應(yīng)器通過測(cè)量光的強(qiáng)度和波長(zhǎng)來確定物體的顏色。這種測(cè)量過程可
2023-06-05 16:15:111383 
使用光電二極管或光敏電阻等光傳感器來感知物體發(fā)射或反射的光線。不同顏色的物體會(huì)吸收或反射不同波長(zhǎng)的光,顏色感應(yīng)器通過測(cè)量光的強(qiáng)度和波長(zhǎng)來確定物體的顏色。這種測(cè)量過程可
2023-06-26 12:01:091134 
如今,計(jì)算機(jī)視覺社區(qū)已經(jīng)廣泛展開了對(duì)物體姿態(tài)的 6D 追蹤和 3D 重建。本文中英偉達(dá)提出了同時(shí)對(duì)未知物體進(jìn)行 6D 追蹤和 3D 重建的方法。該方法假設(shè)物體是剛體,并且需要視頻的第一幀中的 2D
2023-07-03 11:24:521306 
隨著計(jì)算機(jī)科學(xué)和數(shù)字成像技術(shù)的飛速發(fā)展,光學(xué)成像技術(shù)在許多領(lǐng)域中得到了廣泛應(yīng)用,其中之一便是物體三維重建。物體三維重建技術(shù)是一種通過計(jì)算機(jī)處理圖像數(shù)據(jù),獲得物體三維信息的技術(shù)。光學(xué)成像技術(shù)作為物體
2023-09-15 09:29:341631 
近日,微軟在AR技術(shù)領(lǐng)域的雄心壯志再次顯現(xiàn),其最新曝光的專利揭示了公司正全力研發(fā)配備尖端攝像頭的Windows增強(qiáng)現(xiàn)實(shí)(AR)眼鏡。這一動(dòng)向由國(guó)際知名科技媒體Windows Latest率先披露,展示了微軟在AR眼鏡技術(shù)上的全球戰(zhàn)略部署。
2024-07-29 16:19:312005 放大倍數(shù)是一個(gè)物理學(xué)和光學(xué)領(lǐng)域中常見的概念,它描述了通過顯微鏡、望遠(yuǎn)鏡或其他放大設(shè)備觀察物體時(shí),物體的尺寸相對(duì)于其原始尺寸的放大程度。 一、放大倍數(shù)的定義 放大倍數(shù)(Magnification)通常
2024-07-30 14:15:236512 物體識(shí)別交互軟件是一種新型的展示互動(dòng)設(shè)備,其采用Unity3D技術(shù)開發(fā),還運(yùn)用物體識(shí)別技術(shù)、多媒體技術(shù)等現(xiàn)代先進(jìn)技術(shù)。軟件擁有強(qiáng)大的互動(dòng)性和展示效果,有效提升了展品宣傳效果,讓觀眾了解和瀏覽。
2024-10-16 17:22:02937 在這個(gè)科技發(fā)達(dá)的時(shí)代,AR增強(qiáng)技術(shù)也在迅速發(fā)展,在展廳展館中發(fā)光發(fā)熱,帶來了創(chuàng)意無限的互動(dòng)展示效果,AR技術(shù)結(jié)合物體識(shí)別技術(shù)打造的AR物體識(shí)別桌,讓游客有了全新的體驗(yàn),通過新穎的人機(jī)交互方式和趣味展示效果,能吸引人們的目光,吸引人們前來體驗(yàn)。
2024-10-21 17:44:56715
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論