我的PIC18F46K22有一個嚴重的PWM產生問題,當我用MPLAB ICD3上傳代碼時,我用示波器探頭在CCP1、CCP2和CCP3(RB5)上得到3個PWM信號,但是當我用相同的代碼在電路上焊接PIC時,我沒有在3個輸出上得到信號。我該怎么辦?配置位如下:請幫助解決這個問題。
2019-10-12 10:54:07
CCP3PHASE-PLCREMOTEFUSEIN
2023-03-23 00:42:07
CCP3PHASE-PLCREMOTEFUSEIN
2023-03-23 00:42:11
STC15W408AS單片機集成了3路可編程計數器陣列(CCP/PCA)模塊可用于軟件定時器、外部脈沖的捕捉、高速脈沖輸出以及脈寬調制(PWM)輸出。一、與CCP/PWM/PCA應用有關的特殊
2021-11-26 07:56:58
EATON BUSSMANN - CCP2-RM2 - CCP2 NFPA-79 SHORT HANDLE 98AC5927
2024-06-20 21:00:49
最近在看CAN Calibration Protocol,其中的“獲取DAQ列表大小 GET_DAQ_SIZE”不大明白。協議中的PID=First PID of DAQ list+ODT
2016-01-02 20:39:00
由于串級PID還沒搞定,就轉向了自抗擾控制,用STM32控制無刷電機做了一個ADRC速度閉環,沒靜差是真的,但感覺也沒想象中那么強,就寫篇博文記錄一下ADRC大概的使用方法和調參大致的方向。
2021-09-07 06:33:15
BLHeli無刷電調 調參介紹 (八元電調)本人使用某寶8元電調,針對電調需要5v供電以及低速抖動高速停轉問題,進行解決。這是某寶上提供照片:這里因為電調沒有bec,所以需要外部5v電源輸入;這兩個
2022-01-13 06:27:58
最近在研究CAN通信的***協議,其中***協議里的CRO命令中的命令序號(CTR)是怎么給的?我想用基于CCP協議用單片機采集ECU數據
2015-11-17 09:31:53
我使用XC8 PIC18F45 K22。如果我用比較模式,我怎么看哪個引腳會觸發每個我的ECP/CCP?我讀了數據表,但我沒有發現什么引腳會觸發。我也可以在另一個PIN上更改這個觸發事件嗎? 以上
2018-09-07 15:08:01
嗨,我使用的是帶有PIC16F1824的MCC v3.03,但是CCP在重新加載時不會顯示在Pin Manager中。我所做的是:啟動MPLAB-X并使用PIC16F1824和XC8創建新項目。運行
2019-10-09 11:57:04
大家好,我想在PIC18F24K40上學習CCP。我使用Time1配置了CCP2。Time1工作良好。但ccp不工作。以下是我的代碼include包括&包括&stdio.h>
2019-05-28 13:07:59
) 周圍抖動
在講了PI和PD系統的調節方式后,下面分享一下PID系統的調節方式,首先我們先按照PI系統進行調節,先調P在調I,讓系統有一定的過沖后達到穩定.
在出現了上面的 PI 波形之后,下面就開始調節D,慢慢增加D,將過沖補償掉,直到系統穩定,最終效果如下圖,PID系統就基本調節完成了
2025-11-28 07:17:28
說明:本文章適用于STM32初學者,想完成一個好玩且有深度的項目但不知道從何下手的同學。PID調參是平衡車的精髓所在,參數整定的好壞直接影響到平衡車的平衡效果。有的車平衡時來回晃而參數選的好的車就能
2022-01-14 09:14:55
想開發一款控制器,基于帶CAN總線接口的F407系列。 現在考慮參數標定/正定的問題。 不知能否通過生成A2L文件,然后用INCA/ CANaple 通過CAN總線的CCP協議進行標定?
以前沒有用過STM32芯片,用NXP和英飛凌的都可以這樣做,不知道STM32是否可以這樣做
2024-05-31 08:14:13
XCP與CCP之間的差別大不大?都可以直接用來燒寫應用程序嗎???
2024-02-06 07:09:31
本帖最后由 snowolf-lee 于 2012-9-6 11:13 編輯
//功能:實現捕捉完成頻率測量功能//具體設置:ccp1con=00000101上升沿捕捉
2012-09-06 11:12:23
PLAN項目需求:實現方案:四位數碼管顯示;按鍵調參、切換;printf程序調試;uart串行通信。固件庫:GPIO、TIM、UART驅動模塊:led、key、protocol、printf
2021-12-16 06:42:02
正文 這里我們來講解第六個問題,如何系統性的進行PID調參! 這里我們先聊聊什么是PID~ 當今的閉環自動控制技術都是基于反饋的概念以減少不確定性。反饋理論的要素包括三個部分:測量、比較
2023-03-24 16:31:10
小弟是個菜鳥,有些問題比較低級,還望看帖的各位見諒。我在一家微波爐工廠上班,現想用PIC16F887的CCP1及TMR1模塊制作一個頻率測試的方案,用于對微波爐電腦板的頻率進行測試。要求不高,能測到
2015-01-28 22:44:31
最近利用周立功的USBCAN卡研究CCP協議的CAN通信,想實現ECU的DAQ模式,向ECU發送的幀依次為:CONNECT(建立連接)——>EXCHANGE_ID(交換ID)——>
2015-12-02 15:31:53
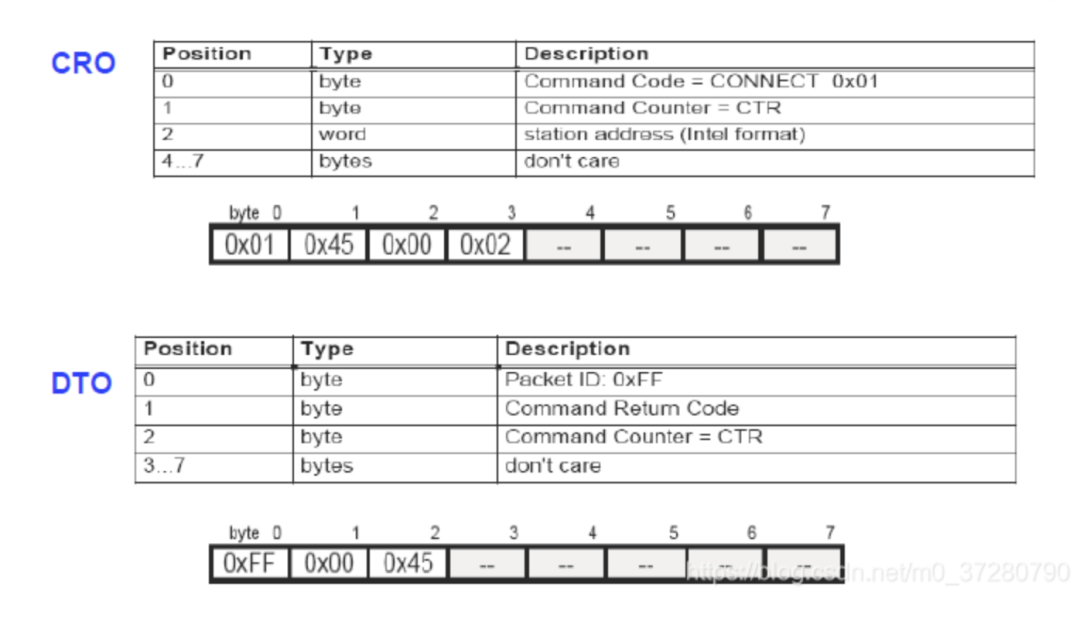
CCP協議里主機與ECU之間進行通信(一問一答模式)時,為什么主設備發給ECU的CRO指令的命令序號與從設備返回給主機的DTO命令序號不一樣?返回的數據場第一個字節是0xff,第2個字節是0,都沒有問題,就是第三個字節表示命令序號的與CRO命令的不一樣,理論上應該是建立了CCP通信的。
2015-11-30 13:16:36
和實參出現不同類型時,則按照不同類型數值的賦值規則進行轉換。主調函數在在調用函數之前,應對被調函數做原型聲明。實參向形參的數據傳遞是單向傳遞,不能由形參再回傳給實參,也就是說實參值傳遞給形參后,調用結束,形參單元被釋放,而實參單元仍保留并且維持原值。
2015-10-18 20:15:46
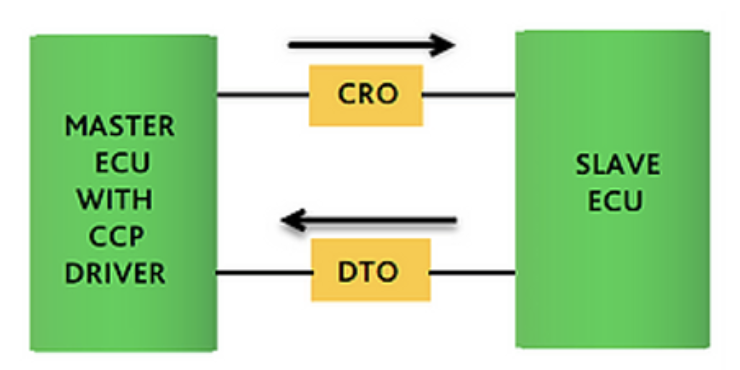
從事汽車電子的人應該都知道CCP協議,這是我半年從事汽車電子測試軟件開發所熟悉知道的協議。CCP(CAN Calibration Protocol)是一種基于CAN總線的ECU(Electronic
2017-08-12 23:50:09
最近在研究CAN通信的ccp協議,其中ccp協議里的CRO命令中的命令序號(CTR)是怎么給的?我基于CCP協議用單片機采集ECU數據
2015-11-17 09:34:55
常見的通信協議格式是什么?如何實現基礎通信協議的設計?
2022-02-14 07:35:37
如題,我在CANtest上通過CAN報文發送了CCP指令\'CONNECT\'、\'SET-MTA\'和‘Upload’。前兩個指令的返回均沒有報錯,可\'Upload\'的返回直接
2024-08-13 10:46:26
不會PID調參?這篇文章圖文結合帶你學會PID調參!讓你成為PID調參大神!!!
2022-01-06 07:47:50
我這里寫了一個代碼,CCP1 capture功能,CCP2 PWM功能。ccp1采集一個500HZ的脈沖波信號,然后算出占空比,再將占空比相同的信號通過CCP2輸出(1Khz),但是目前我采集的信號
2021-06-04 11:05:14
如果是自制飛控板的話,還能用地面站軟件(mission planner)進行刷固件或者調參么?有哪位大神可以提供一些入門的學習資料,剛開始,有點懵,不知如何下手。
2019-06-27 04:35:52
在開發板上看到有CCP2這個引腳,但是芯片本身沒有ccp2這個拐角?ccp2是什么呢?
2019-09-03 09:43:55
請問各位大神,LWIP協議中是怎樣自動調用回調函數的呢?這個原理一直不太理解,求教!!
2020-03-24 22:29:24
有人了解什么是肥鯊協議嗎?OSD串口調參的!
2019-07-04 04:36:00
剛接觸這塊,問個最基本的問題,飛控通過串口跟圖傳模塊通信時(OSD調參),遵循什么協議?怎么控制的,請指教!!!舉個簡單的例子,如果我打算將圖傳模塊的發射通道由通道1改為通話3,飛控要發送什么數據,怎么實現控制?
2019-07-05 04:36:01
??大家好,我是小政。本篇文章我將針對PID調參進行詳細的講解,讓每位小伙伴能夠對比例、積分、微分三個參數如何調節有更加清晰的理解。一、調參步驟確立機械中值直立環(內環)——Kp極性、Kp大小、Kd
2022-01-14 06:26:31
摘要:CCP 協議是一種CAN 總線標定匹配協議。本文簡單介紹該協議的基本原理,以及一種基于該協議的汽車ECU 標定系統的實現方法。最后,結合MC9S12DP256 芯片以及μC/OS-II操作系統
2009-05-16 20:10:34 47
47 CCP 協議(CAN Calibration Protocol)可實現可靠,準確和快速的動態標定。本文在簡要介紹CCP 協議的原理,標定系統硬、軟件的基礎上,著重討論了CCP 協議驅動接口程序和FLASH 擦寫程
2009-07-09 09:58:1258 本文介紹了廣泛應用于在線標定的CCP協議(Can Calibration Protocol), 基于該協議設計了一種應用于混合動力汽車電池控制器(Battery Control Unit, BCU)的在線標定系統,通過該系統來設置BCU的相應
2010-02-23 14:42:1922 CCP協議是一種基于CAN總線的匹配標定協議。 本文介紹了該協議的基本原理,通信方式以及用于ECU標定的各種工作模式,并討論了一種基于CCP協議的汽車ECU標定系統,該系統實現了對
2010-07-13 17:39:1760 本文介紹了廣泛應用于在線標定的CCP協議(Can Calibration Protocol), 基于該協議設計了一種應用于混合動力汽車電池控制器(Battery Control Unit, BCU)的在線標定系統,通過該系統來設置BCU的相應
2010-07-14 17:22:0719 汽車電子產品正從分布式向中央計算及物理區域控制方向發展,中央計算平臺是車身域以及動力域的核心計算單元。經緯恒潤中央計算平臺CCP
2024-11-28 18:04:51
本文借鑒了汽車發動機電控系統標定方法,提出了一種基于CCP協議的電池管理系統的標定方案。該方案主要由電池管理系統、USB--CAN通信模塊及主控PC機的標定平臺軟件組成,并采用國際
2011-12-13 17:27:2551 CCP是一種基于CAN總線的ECU標定協議,已經在許多歐美汽車廠商得到應用,采用CCP協議可以快速有效地實現對汽車電控單元的標定。
2012-09-07 17:09:57 6807
6807 
介紹了基于Matlab/RTW(Real-time Workshop)和RTX(Real-time extension)構建實時仿真系統的方法;針對基于RTX的實時仿真系統不能直接進行在線調參的不足,提出了一種利用C API(C文件應用程序
2013-03-13 16:20:0236 對ccp比較好的介紹,希望對大家有幫助!
2015-11-20 11:36:010 英文版軟件,很好的軟件,WinGUI_2.3調參軟件
2015-12-08 14:28:163 NAZA 驅動調參軟件,需要的可以看一看了
2016-02-15 15:10:570 CF飛控調參說明
2017-10-09 14:56:2515 統的工作情況和各種飛行狀態的信息。一旦浮空器發生飛行故障,飛參記錄數據為查找設備故障及失事原因提供重要依據。飛參記錄數據解析軟件根據約定的傳輸協議,將特定形式的記錄數據解析為便于查看的記錄數據,其解析的效率直
2017-11-11 17:29:115 逃逸速率為分析手段,討論阻尼系數變化對系統發生隨機共振的影響;然后,分析了系統形狀參數對系統產生隨機共振現象的影響,通過聯合調整阻尼系數和系統參數實現了大頻率微弱信號的檢測,并討論了不同采樣頻率與調參系統輸出頻譜特性的
2017-12-12 15:16:084 CSK斷線連接器和CCP電纜連接器到底有什么不同?總的來說就是CSK比CCP更容易安裝,但是從長遠來說,CCP使用更廣泛,更耐用。
2018-06-18 09:37:002258 各路大神求指點,現在我方有一第三方設備支持CCP協議通訊,可否與我方PLC的CANlink或CANopen或RS232等進行通訊,或者通過其他方式進行轉換連接也行,只要能通訊上就行,職場菜鳥求指點
2018-09-15 11:21:25527 本文檔的主要內容詳細介紹的是APM固定翼的詳細調參中文版資料免費下載。
2019-02-28 08:00:000 本文檔的主要內容詳細介紹的是使用PIC單片機的CCP模塊功能產生PWM的程序免費下載。
2019-08-22 17:30:0014 STC15系列部分單片機內部集成了三路CCP/PCA/PWM模塊,如圖 24.1所示。注: STC15W1K16S、STC15W404S、STC15W201S、STC15F100W系列單片機無 CCP/PCA/PWM模塊。 STC15W4K32S4系列單片機來說,只有兩路CCP輸出。
2019-05-16 08:00:0034 對于深度學習本人也是半路出家. 現在的工作內容主要就是使用CNN做CV任務. 干調參這種活也有兩年時間了. 我的回答可能更多的還是側重工業應用, 技術上只限制在CNN這塊.
2019-06-08 14:41:002669 不訓練不調參,AI自動構建超強網絡,告別煉丹一大步
2019-06-16 09:41:403060 只靠神經網絡架構搜索出的網絡,不訓練,不調參,就能直接執行任務。
2019-08-06 14:18:373613 谷歌大腦備受關注的“權重無關神經網絡”終于開源了!其關鍵思想是通過不再強調權重來搜索網絡結構,僅使用隨機共享的權重,也可以執行各種任務的神經網絡。終于可以不用調參煉丹了嗎?快來復現看看!
2019-08-28 17:21:473745 
隨著汽車電子技術的發展,電子控制單元(ECU)的標定已成為汽車電子控制裝置開發的一個重要環節。大多數ECU都需要經過匹配標定的過程,從而確定其運行參數和控制參數。目前國內還沒有成熟的基于CCP
2020-04-26 10:04:292179 
的發展逐漸在向天線和網絡智能化方向推進。目前成熟的AISG是基于2.0版本,包括基礎協議和拓展協議。是天線實現遠程電調的基礎。AISG的擴展協議,包括ASD,為接口創新奠定了基礎。
2020-11-11 10:39:001 3.打開dji調參軟件,會讓你輸入用戶名和密碼,在下面有個用戶注冊,點擊進入填入相關信息,只用填寫帶有紅色的就行。現在進入填寫的油箱,會有個新 郵件,是dji發過來的,點擊那個連接,等到頁面出來了就可以關了,這是激活賬號。然后關閉調參軟件,重新打開,輸入郵箱和密碼,點擊記住密碼,然后登陸 就進去了
2020-09-15 12:35:078933 由于文章較長,所以我還是先把目錄提前。 一、認識管道流 1.1 數據導入 1.2 使用管道創建工作流 二、K折交叉驗證 2.1 K折交叉驗證原理 2.2 K折交叉驗證實現 三、曲線調參 3.1 模型
2020-09-25 10:57:242732 
每個 CCP( 捕捉 / 比較 / 脈寬調制 ) 模塊有一個 16 位寄存器,它可以用作 16 位捕捉寄存器、 16 位比較寄存器或 10 位 PWM 主 / 從占空比寄存器。除了特殊事件觸發器之外
2020-11-10 08:00:0017 CCP協議定義了兩種工作模式:一種是Polling(查詢)模式,另一種是DAQ(數據采集)模式。在本文所設計的標定系統中,根據實際需求情況,采用了DAQ模式。
2021-04-12 09:54:294257 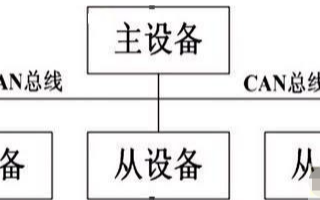
CCP 協議是一種CAN 總線標定匹配協議。本文簡單介紹該協議的基本原理,以及一種基于該協議的汽車ECU 標定系統的實現方法。最后,結合MC9S12DP256 芯片以及μC/OS-II操作系統,詳細討論了此標定系統的CCP 軟件實現方法。
2021-04-12 09:57:393859 
STC15W408AS單片機集成了3路可編程計數器陣列(CCP/PCA)模塊可用于軟件定時器、外部脈沖的捕捉、高速脈沖輸出以及脈寬調制(PWM)輸出。一、與CCP/PWM/PCA應用有關的特殊
2021-11-18 14:21:0651 使用stm32f103rct6,配置uart中斷,配合pyqt在線調參每改一次pid都要重新燒太麻煩了,能在線調多美好啊
2021-12-22 19:42:391 說明:本文章適用于STM32初學者,想完成一個好玩且有深度的項目但不知道從何下手的同學。PID調參是平衡車的精髓所在,參數整定的好壞直接影響到平衡車的平衡效果。有的車平衡時來回晃而參數選的好的車就能
2022-01-14 11:11:5116 ??大家好,我是小政。本篇文章我將針對PID調參進行詳細的講解,讓每位小伙伴能夠對比例、積分、微分三個參數如何調節有更加清晰的理解。一、調參步驟確立機械中值直立環(內環)——Kp極性、Kp大小、Kd
2022-01-14 11:20:5413 CCP協議主要用于CAN通訊汽車ECU標定
2022-03-28 17:07:119 隨著人們對汽車安全性認識的不斷提高,電子穩定性程序ESP的裝配率不斷提高,而針對各車型的ESP匹配標定工作,在很大程度上影響ESP了的工作性能。本文在課題組已有的ESP程序中,嵌入了符合CCP協議
2022-04-02 17:29:040 本文借鑒了汽車發動機電控系統標定方法,提出了一一種 基于CCP協議的電池管理系統的標定方案。該方案主要由電池管理系統、USB-CAN通信模塊及主控PC機的標定平臺軟件組成,并采用國際通用的CCP作為電池管理系統和PC機的標定通信協議,由于CCP基于地址通信,可以提高了系統的擴展性和通用性。
2022-04-02 17:30:523 采用基于CAN總線的匹配標定協議,對汽車控制器局域網絡中的電子控制單元進行匹配標定。分析了CCP協議用于標定的工作機理,討論了利用CANape進行基于CCP標定的實現方法,闡述了如何生成
2022-04-06 16:18:173 基于CCP協議的電控柴油機數據采集系統設計資料下載
2022-04-10 11:10:455 這篇文章介紹C語言函數的不定參數、可變參數 形參,實現printf一樣的傳參效果。
2022-08-14 09:58:423557 嵌入式函數回調注冊機制是一種常用的解耦技術,它通過在應用程序中注冊回調函數的方式來實現模塊之間的通信,從而使系統更加靈活、可擴展和易于維護。函數回調注冊機制可以通過函數指針和回調函數來實現。
2023-04-13 15:52:282203 嵌入式函數回調注冊機制是一種常用的解耦技術,它通過在應用程序中注冊回調函數的方式來實現模塊之間的通信
2023-05-20 16:43:105715 CANape推出新功能Simulink XCP Server,針對Simulink模型以及ECU內部數據的參數化和可視化,讓模型調參變得簡單。
2022-08-01 15:00:052529 
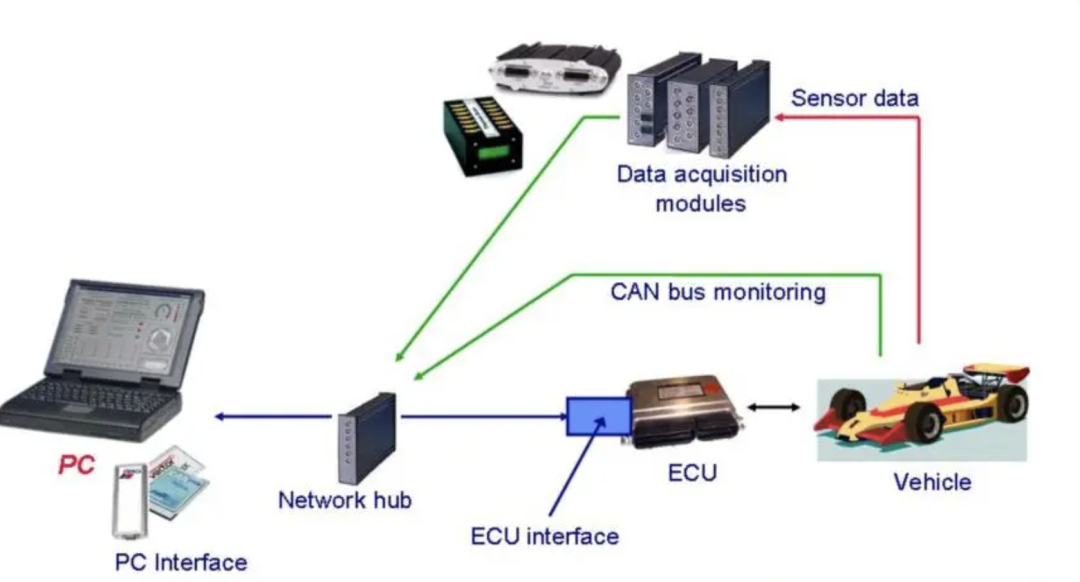
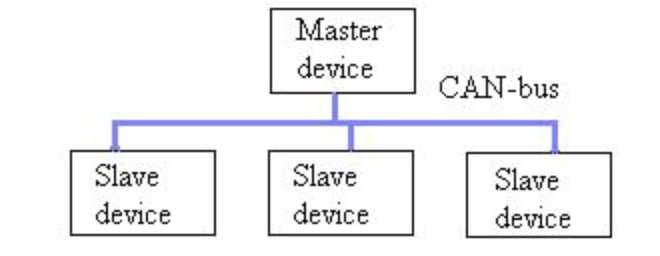
CCP協議原理 CCP是一種主從模式的協議,CCP主節點(例如我們的電腦PC)通過向從節點發送命令來開始通信。一條CAN總線上可以連接多個從節點。CCP使用通用的命令進行數據采集,并使用簡單的內存
2023-07-30 16:23:533498 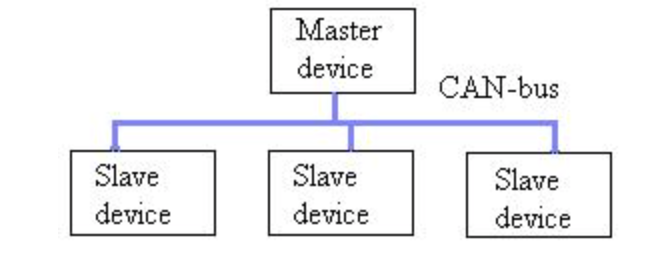
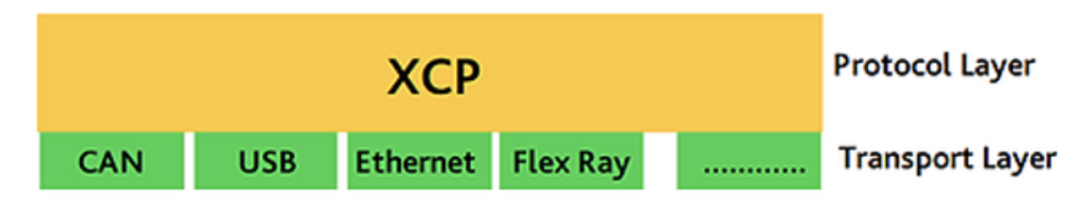
眾所周知,CCP是CANCalibrationProtocolCAN標定協議的縮寫,XCP是UniversalMeasurementandCalibrationProtocol通用測量與標定協議
2023-09-23 08:23:183145 
。 想要在 不同的環境中 加速運行機器學習。 想要更容易 實現或試驗新的機器學習算法 的研究員或數據科學家,包括:超參調優算法,神經網絡搜索算法以及模型壓縮算法。 它支持的框架有: PyTorch
2023-10-30 10:28:023753 
形參的分類 形參的分類可以分為六種: 帶有默認值的位置形參 不帶默認值的位置形參 帶有默認值的關鍵字形參 不帶默認值的關鍵字形參 可變長度的位置形參 可變長度的關鍵字形參 實例: def fn (a
2023-11-14 11:19:421505 實際調參 從實際的 PID 系統曲線來理解 PID 各個系數的調節效果。 ① 先調整比例系數,積分、微分系數設置為 0,此時的系統只有比例環節參與控制,此時系統的曲線出現大幅振蕩。 首先確定硬件上
2023-11-14 17:40:533073 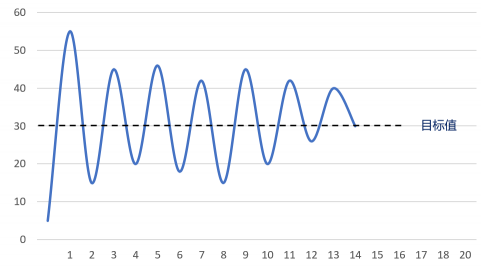
作為無人車以及智能機器人而言,在裝配過程中各個傳感器之間的外參標定一直是比較頭疼的問題。這里作者也系統的學習了一下,傳感器的外參標定和在線標定問題。 下圖是我們常用的幾個坐標系,而對于常用的外參
2023-11-20 15:34:233350 
今天給大家一篇關于機器學習調參技巧的文章。超參數調優是機器學習例程中的基本步驟之一。該方法也稱為超參數優化,需要搜索超參數的最佳配置以實現最佳性能。機器學習算法需要用戶定義的輸入來實現準確性和通用性之間的平衡。這個過程稱為超參數調整。有多種工具和方法可用于調整超參數
2024-03-23 08:26:351414 
HLK-LD2410B/C接線教程、參數解析、APP調參教程、上位機調參教程、常見異常情況自檢等等內容,一文匯總。
不管是萌新小白還是資深玩家,都可以快速入門。
2024-05-31 14:48:4011653 
長短時記憶網絡(Long Short-Term Memory, LSTM)是一種特殊的循環神經網絡(RNN),它能夠學習長期依賴信息。在實際應用中,LSTM網絡的調參是一個復雜且關鍵的過程,直接影響
2024-11-13 10:01:082497 BP神經網絡的調參是一個復雜且關鍵的過程,涉及多個超參數的優化和調整。以下是一些主要的調參技巧與建議: 一、學習率(Learning Rate) 重要性 :學習率是BP神經網絡中最重要的超參數之一
2025-02-12 16:38:491569 關于LD2410B/C那些你不得不知道的事?免費申樣、接線教程、參數解析、APP調參教程、上位機調參教程、常見異常情況自檢等等內容,一文匯總~不管是萌新小白還是資深玩家,都可以快速入門
2025-02-05 18:09:252819 
安信可配網助手app介紹 安信可配網助手app是由安信可開發的一款 可拿來對安信可模組進行配網以及對雷達模組進行調參的APP 。 下面將對APP搭配安信可雷達模組Rd-01、Rd-03_V2
2025-10-31 08:59:55369 
參數的優化過程。它通過使用標準的標定工具(例如USBCANFD-400U)標定ECU的各項參數并且查看標定效果。標定主要依賴兩個標準協議:CCP和XCP。CCP(C
2025-11-28 11:35:12410 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論