本文的優勢不僅包括討論A-SLAM的內部組成部分,還包括其應用領域、局限性和未來前景,以及對過去十年A-SLAM進行全面的統計調查。
2023-03-17 10:44:57 1351
1351 上周的組會上,我給研一的萌新們講解什么是SLAM,為了能讓他們在沒有任何基礎的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會匯報總結一下。 這次匯報的題目我定為“視覺SLAM:一
2023-08-21 10:02:0713482 
神經隱式表示已經被探索用于增強視覺SLAM掩碼算法,特別是在提供高保真的密集地圖方面。
2024-01-17 10:39:501607 
升壓電路圖集合,升壓電路設計方案,電路設計技巧,升壓電路一文搞懂;給大家分享 升壓電路技術文檔合集
2025-05-15 15:58:3219474 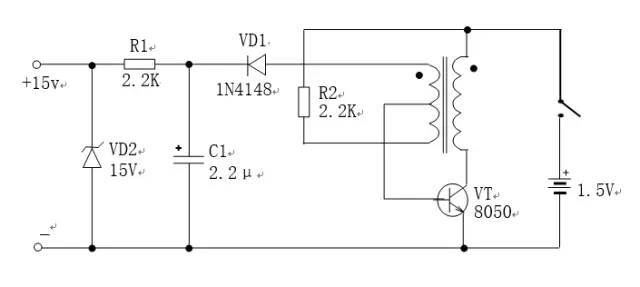
動過程中通過重復觀測到的地圖特征來定位自身位置和姿態,再根據自身位置增量式的構建地圖,從而達到同時定位和地圖構建的目的。SLAM重要的理論與應用價值被認為是實現全自主移動機器人的關鍵技術。 ? 簡單來說,實現 SLAM 需要兩類技術,一類技術是傳感器信號處理(包括前端處理),
2022-12-03 01:11:005266 常有必要的 。 回環檢測失敗 如何提升機器人回環檢測能力? 那么,怎么才能讓機器人的回環檢測能力得到一個質的提升呢?首先要有一個算法上的優化。 1. 基于圖優化的SLAM算法 基于圖優化
2019-03-06 15:38:04
近年來,由于掃地機的出現使得SLAM技術名聲大噪,如今,已在機器人、無人機、AVG等領域相繼出現它的身影,今天就來跟大家聊一聊國內SLAM的發展現狀。 SLAM的多領域應用SLAM應用領域廣泛,按其
2018-12-06 10:25:32
無人機在飛行的過程中需要知道哪里有障礙物,該怎么規避,怎么重新規劃路線。顯然,這是SLAM技術的應用。但無人機飛行的范圍較大,所以對精度的要求不高,市面上其他的一些光流、超聲波傳感器可以
2020-12-01 14:26:37
研究生期間進行了基于2D激光雷達的SLAM的研究,當時主要做了二維激光雷達的數據處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機會,決定正式邁出第一步,徹底進入SLAM的坑!心中
2021-08-30 06:13:31
導讀:UPS是系統集成項目中常用到的設備,也是機房必備的設備。本文簡單介紹了UPS的種類、功能、原理,品質選擇與配置選擇方式,基礎維護等相關的內容。一文搞懂UPS本文主要內容:UPS種類、功能
2021-09-15 07:49:53
參考一文搞懂開關電源波紋的產生、測量及抑制開關電源紋波的產生上圖是開關電源中最簡單的拓撲結構-buck降壓型電源。隨著SWITCH的開關,電感L中的電流也是在輸出電流的有效值上下波動的。所以在輸出端
2021-12-30 08:31:11
嵌入式Linux開發系統開發之《一節課搞懂文件IO與標準IO》
2021-12-16 08:18:24
《Fundamentals of Computer Graphics》翻譯(三):隱式2D直線
2019-09-03 12:19:29
您好,我現在正在使用PIC16F18313,在代碼中,我聲明了一個變量,它位于我放入的示例代碼中,問題是,我收到一個警告:隱式簽名到無符號轉換,我不知道是什么原因或者如何修復它。關于我的問題:希望你能得到一個很好的回答。謝謝。
2020-04-07 14:06:10
一文看懂BP神經網絡的基礎數學知識
2020-06-16 07:14:35
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
習神經神經網絡,對于神經網絡的實現是如何一直沒有具體實現一下:現看到一個簡單的神經網絡模型用于訓練的輸入數據:對應的輸出數據:我們這里設置:1:節點個數設置:輸入層、隱層、輸出層的節點
2021-08-18 07:25:21
mysql 隱式轉換問題
2019-08-13 06:07:31
`BP神經網絡首先給出只包含一個隱層的BP神經網絡模型(兩層神經網絡): BP神經網絡其實由兩部分組成:前饋神經網絡:神經網絡是前饋的,其權重都不回送到輸入單元,或前一層輸出單元(數據信息是單向
2019-07-21 04:00:00
:warning:(361)函數聲明為隱式int.,這似乎對代碼的實際編譯或運行沒有任何影響,但是它有點煩人。有什么想法,為什么這個特定的功能是扔這個警告?
2019-10-24 13:23:19
人工神經網絡(Artificial Neural Network,ANN)是一種類似生物神經網絡的信息處理結構,它的提出是為了解決一些非線性,非平穩,復雜的實際問題。那有哪些辦法能實現人工神經網絡呢?
2019-08-01 08:06:21
優化神經網絡訓練方法有哪些?
2022-09-06 09:52:36
隱裂、熱斑、PID效應,是影響晶硅性能的三個重要因素。今天兔子君帶大家了解一下電池片隱裂的原因、如何識別及預防方法。1. 什么是“隱裂”隱裂是晶體硅組件的一種較為常見的缺陷,通俗的講,就是一些肉眼
2018-10-15 19:58:03
和神經網絡包。AIoT那么火,為何大家卻止步于科普文?因為現成的機器學習框架都太復雜太難用。NNoM從一開始就被設計成提供給嵌入式大佬們的一個簡單易用的神經網絡框架。你不需要會TensorFlow
2019-05-01 19:03:01
題目:基于SLAM的移動機器人設計嵌入式PPT應具有的幾個部分1、有哪些硬件 1)小車 2)STM32F429開發板 3)樹莓派3b+開發板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
作者:李云紅0 引言自20世紀70年代以來,模擬電路故障診斷領域已經取得了一定的研究成果,近年來,基于神經網絡技術的現代模擬電路軟故障診斷方法已成為新的研究熱點,神經網絡的泛化能力和非線性映射能力
2019-07-05 08:06:02
下面來探討一下深度學習在嵌入式設備上的應用,具體如下:1、深度學習的概念源于人工神經網絡的研究,包含多個隱層的多層感知器(MLP) 是一種原始的深度學習結構。深度學習通過組合低層特征形成更加抽象
2021-10-27 08:02:31
什么是回環檢測?在講解回環檢測前,我們先來了解下回環的概念。在視覺SLAM問題中,位姿的估計往往是一個遞推的過程,即由上一幀位姿解算當前幀位姿,因此其中的誤差便這樣一幀一幀的傳遞下去,也就是我們
2018-10-23 17:47:22
SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。
2020-05-20 08:19:40
機器人定位導航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術和產品落地上都較為成熟,因而成為現下最為主流的定位導航方式,在家用掃地機器人及商用送餐機器人等服務機器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
常見的問題,但也不必過度擔心。 3. 識別“隱裂”的方法 EL(Electroluminescence,電致發光)是一種太陽能電池或組件的內部缺陷檢測設備,是簡單有效的檢測隱裂的方法。利用晶體硅
2020-12-09 15:33:38
【總結】視覺SLAM筆記整理
2020-07-17 14:05:20
圖引擎,讓機器人在復雜、大面積的場景下也能輕松應對,穩定發揮,完成定位導航任務。 傳統SLAM 及SLAM 3.0的建圖對比: -建圖精度高,圖優化式建圖 - 主動閉環修正 - 建圖穩定、不
2019-01-21 10:57:46
提出多目標隱寫檢測評估方法,分析隱寫檢測的應用領域,針對目前隱寫檢測指標過于粗略的問題,對隱寫檢測評估指標進行擴展和描述。結合隱寫檢測應用領域的不同需求,應用
2009-03-20 15:19:56 20
20 提出一種基于多特征的空域替換類圖像隱寫檢測方法。通過分析空域替換隱寫原理,找出空域替換類隱寫的共性,分別用位平面紋理相似性和位平面統計相關性以及位平面低比特位
2009-03-20 15:32:217 為實現高效安全的信息存儲,在分析訪問權限控制與加密技術等數據保護措施及現有文件隱寫系統的基礎上,提出基于NTFS文件系統的最小侵入式隱寫系統。該系統可作為NTFS文件系統
2009-03-31 10:30:2917 針對網絡隱通道能繞過防火墻或其他形式的安全防護系統的問題,從網絡隱通道的構建原理方面討論各種常見的構建隱通道的方法,提出2種新的隱通道構建方法:基于數據包長度特
2009-03-31 10:33:0314 研究GF(3)上的編碼方法,利用三元Golay碼給出一種GF(3)上的隱寫碼,其隱寫性能較常見二元隱寫碼有顯著提高。提出基于三元Golay隱寫碼的快速隱寫算法。該算法有效地降低了隱寫算法
2009-04-08 08:46:4326 針對入侵檢測中普遍存在誤報與漏報過高的問題,本文提出一種新的基于隱馬爾可夫模型的系統入侵檢測方法。該方法以程序正常執行過程中產生的系統調用序列為研究對象,首先
2009-08-05 09:47:078 本文采用免疫單克隆算法對RBF 神經網絡的隱層中心值和寬度進行優化,用遞推最小二乘法訓練隱層和輸出層之間的權值。并提出一種新的親和力變異方法,有效地改善了抗體變異
2009-12-29 17:17:5410 基于量化索引調制(QIM)的隱寫技術正日益受到隱寫分析的威脅。該文將通常在DCT 域隱寫的做法改為在非均勻DCT 域進行,將參數作為密鑰,提出了一種NDCT-QIM 圖像隱寫方法。由于在攻
2010-02-08 16:00:159 基于隱式PIGPC的網絡控制系統時延補償方法_田中大
2017-01-07 18:21:310 文中以隱式廣義預測控制的原理為基礎,建立了以受控自回歸積分滑動平均模型(即CARIMA)為基礎的LN氣化儲備站出口壓力控制的隱式廣義預測控制,、利用MATLAB對此控制系統進行了仿真,同時介紹了常規
2017-11-09 17:18:523 SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機
2017-11-22 11:52:333 針對隱馬爾可夫模型(HMM)參數難以配置的問題,提出一種改進的基于隱馬爾可夫模型的態勢評估方法,更加準確地反映網絡的安全態勢。所提方法以入侵檢測系統的輸出作為輸入,根據Snort手冊將報警事件分類
2017-12-03 10:24:290 為了模擬秀麗隱桿線蟲的趨溫性行為,提出一種通過人工神經網絡對秀麗隱桿線蟲的趨溫性行為進行建模的方法,并進行實驗仿真。首先,建立秀麗隱桿線蟲的運動模型;然后,通過設計非線性函數逼近線蟲趨溫性的運動邏輯
2017-12-15 10:28:5911 擁有大數據訓練資源的前提下,研究了隱寫對圖像特征的影響,找出了隱寫分析與圖像特征之間的重要關系,基于此提出了一種為測試樣本選擇專用訓練集的隱寫分析方法.以經典的JPEG隱寫算法nsF5和主流的JPEG隱寫分析特征(CC-PEV、CC-Chen、CF:#、DCTR和GFR)為例組織實驗。結果
2017-12-15 16:05:320 針對短波頻譜利用率低下及頻率選擇不夠智能的局限性,提出一種基于隱馬爾可夫模型( HMM)的短波認知頻率選擇方法。應用認知無線電原理,將短波傳統用戶作為主用戶,將采用認知無線電技術的短波電臺作為認知
2017-12-18 16:03:440 針對傳統的二分類音頻隱寫分析方法對未知隱寫方法的適應性較差的問題,提出了一種基于模糊C均值(FCM)聚類與單類支持向量機(OC-SVM)的音頻隱寫分析方法。在訓練過程中,首先對訓練音頻進行特征提取
2017-12-21 13:30:510 針對面向高級音頻編碼(AAC)音頻壓縮標準的內容安全和隱寫分析算法相對滯后的問題,提出一種面向AAC壓縮域的通用隱寫分析方法。該算法利用相鄰的修正的離散余弦變換(MDCT)系數之間的相關性,構建
2017-12-23 11:32:420 針對現有的基于用戶顯式反饋信息的推薦系統推薦準確率不高的問題,提出了一種基于顯式與隱式反饋信息的概率矩陣分解推薦方法。該方法綜合考慮了顯示反饋信息和隱式反饋信息,在對用戶信任關系矩陣和商品評分矩陣
2018-01-04 16:22:250 狀態進行客觀、準確地評估和預測,成為亟待解決的問題.為此,提出了一種基于隱馬爾可夫模型的軟件系統狀態評估預測方法.該方法基于軟件系統外在特征參數,通過K-means方法構建系統的觀測狀態,并以此建立隱馬爾可夫模型,建
2018-01-05 10:56:011 針對單一數據類型隱寫方法安全性不高、隱寫容量不足等問題,提出了一種具有分級安全的文本隱寫方法。首先,將整個載體文檔中的多種類型的數據作為備選隱寫載體,以不同類型數據的隱寫特點和隱寫分析技術為評估依據
2018-01-14 16:26:310 目前,在數字圖像隱寫中,基于空域和頻域隱寫的研究最為廣泛。基于空域隱寫的研究起步較早,典型的隱寫方法如最不重要位(Least Significant Bit,LSB)替換隱寫、加減K( Plus
2018-02-23 09:55:002 分析2種不同的LM方法迭代步稀疏求解方案。在此基礎上,采用隱式Cholesky分解算法求解LM迭代步,減少冗余計算量,進一步提高LM方法迭代步計算效率,算例通過對大規模電力系統潮流的仿真分析,驗證了該方法的正確性和高效性。
2018-02-28 14:55:585 、位姿變換估計以及閉環檢測對SLAM系統的影響,建立了關鍵幀閉環匹配算法和SLAM實時性與魯棒性之間的關系,提出了一種基于ORB關鍵幀匹配算法的SLAM方法。運用改進ORB算法加快了圖像特征點提取與描述符建立速度;結合相機模型與深度信息,
2018-03-26 10:57:326 LSTM隱層神經元結構: LSTM隱層神經元詳細結構: //讓程序自己學會是否需要進位,從而學會加法#in
2018-07-29 10:06:019948 開發大規模圖像庫的搜索和瀏覽算法,使得圖像自動標注的重要性日益增強。基于隱馬爾科夫模型(HMM)與卷積神經網絡(CNN),我們提出了一種新的圖像標注方法HMM + CNN。首先,訓練一個多標簽學習
2018-11-16 17:17:184 網絡RNN。在RNN中,神經元的輸出可以在下一時間段直接作用到本身。換句話說,就是遞歸神經網絡的隱層不但可以接收到上一層的輸入,也可以得到上一時刻當前隱層的輸入。這一個變化的重要意義就在于使得神經網絡具備了
2019-03-13 14:32:345369 本文是調研視覺SLAM中的實現方法的總結,包括三方面內容:姿態計算、閉環檢測、BA優化。
2019-05-18 11:49:014830 一文搞懂幾種常見的射頻電路類型及主要指標。
2020-07-27 10:26:0010 、Logistic回歸、SVM等基于統計學習理論的方法(也可以看做具有一層隱層節點或不含隱層節點的學習模型,被稱為淺層模型)來說,具有較大的優越性。
2020-08-24 15:57:526804 如圖所示拓撲結構的單隱層前饋網絡,一般稱為三層前饋網或三層感知器,即:輸入層、中間層(也稱隱層)和輸出層。它的特點是:各層神經元僅與相鄰層神經元之間相互全連接,同層內神經元之間無連接,各層神經元之間
2021-03-01 10:09:0017 同時定位與地圖構建(SLAM)作為機器人領域的硏究熱點,近年來取得了快速發展,但多數SLAM方法未考慮應用場景中的動態或可移動目標。針對該問題,提出一種適用于動態場景的SLAM方法。將基于深度學習
2021-03-18 10:39:3921 針對基于RBPF的激光SLAM算法在重采樣過程中出現的樣本貧化和激光測量模型不準確的問題,提出種優化的激光SLAM算法。為緩解重采樣過程中的樣本貧化問題,采用最小采樣方差重采樣方法改進原重采樣方法
2021-04-01 10:48:316 課題組已將該研究成果應用于智能駕駛即時定位與建圖(SLAM)任務中,提出了基于三維激光數據的層級式SLAM方法,實現了無GNSS環境下智能無人系統的高精度自主定位定姿,在智能駕駛國際著名公開數據集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。
2021-04-20 09:19:302747 
特征工程是影響杋器茡習算法性能的關鍵因素之一,隨著互聯網數據規模的擴大,傳統特征工程的人力成本不斷増加。為減少對特征工程的依賴,構建一種結合顯式和隱式特征交互的融合模型。將稀疏結構單元與殘差單元
2021-05-12 16:13:535 「1、什么是C語言的隱式函數聲明」 在C語言中,函數在調用前不一定非要聲明。如果沒有聲明,那么編譯器會自動按照一種隱式聲明的規則,為調用函數的C代碼產生匯編代碼。下面是一個例子: 單純的編譯上述
2021-05-25 09:38:104657 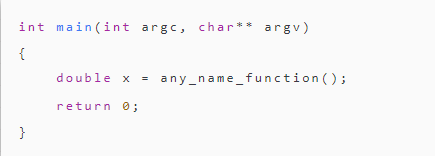
高效共享與利用的難題,面向快速、準確、大范圍多機協同SLAM需求,本文提出了一種基于集中式架構的多無人機局部地圖數據高效共享和融合的SLAM方法Data Sharing Oriented Multi-uav Collaborative SLAM( DSM-SLAM)。該方法創新性地提出了:(1)基于
2021-06-02 11:29:378 基于機器學習的中文隱式實體關系抽取方法
2021-06-02 14:42:144 電子發燒友網站提供《一文了解電動汽車的中樞神經.pdf》資料免費下載
2022-10-14 11:16:371 近年來,使用機器學習技術進行特征提取的基于調制解調器特征的SLAM越來越受到關注,并有望在幾乎所有機器人工作環境中超越傳統方法。
2022-10-17 16:39:461356 SLAM本質上是一個狀態估計問題,根據傳感器做劃分,主要是激光、視覺兩大類。激光SLAM的研究在理論和工程上都比較成熟,現有的很多行業已經開始使用激光SLAM完成工業工作;而視覺SLAM
2022-12-02 15:00:283030 動過程中通過重復觀測到的地圖特征來定位自身位置和姿態,再根據自身位置增量式的構建地圖,從而達到同時定位和地圖構建的目的。SLAM重要的理論與應用價值被認為是實現全自主移動機器人的關鍵技術。 簡單來說,實現 SLAM 需要兩類技術,一類技術是傳感器信號處理(包括前端處理),這
2022-12-03 00:25:061948 手持SLAM設備最大的特點肯定要放到手持這個動作上面,由于SLAM算法的優越性,手持可以做到走到哪里測到哪里。
2022-12-27 10:43:416809 我們提出了NICE-SLAM,一個密集的RGB-D SLAM系統,它具有實時性、可擴展性、預測性和對各種挑戰性場景的魯棒性。
2023-01-30 11:19:291336 在實際開發中,Qt中很多類可以直接作為函數參數傳遞,這是為什么?其背后的實現機制又是什么?這些都歸功于隱式共享
2023-02-12 16:52:531643 在NVIDIA instant-ngp、tiny-cuda-nn的幫助下,神經隱式曲面建模速度10小時——10- 20分鐘。
2023-03-24 17:03:492066 
Day 上,網易伏羲視覺計算負責人李林橙以《NVIDIA CUDA 技術助力網易瑤臺神經隱式曲面建模 20 倍加速》為題,分享了 AIGC 趨勢下其創新性的神經隱式曲面建模解決方案,以及項目過程中的實踐經驗和心得。以下為演講內容概要。 網易瑤臺項目背景 網易瑤臺是網易伏羲旗下沉浸式活動平臺,致力于用人工
2023-04-01 01:40:031464 很多同學都覺得Slam方向難以入門,也難以學深。但其實相對來講,不像其他很多方向,很多的東西大家都已經做了,并且做的很不錯,要想發論文或者找創意突破比較吃力。slam方向還有很多深層次的多領域結合應用的內容還比較少,并且slam更深的內容還有很多東西需要做。
2023-05-09 14:25:141448 
說起網絡布線,不得不提跳線架 配線架 這些產品,很多人會把跳線架和配線架搞混,一文搞懂跳線架與配線架區別別再搞混了,下面跟著科蘭小編一起來了解一下吧。 跳線架與配線架區別 習慣上你可以理解為是兩個
2023-05-19 11:27:532503 為了區分正常定時格式及其減少消隱對應格式,在 HDMI 2.1 視頻定時擴展元數據中添加了對減少消隱 (RB) 位的支持。Synopsys HDMI VIP 支持 HDMI 2.1 和 VTEM,是驗證減少消隱時序的一站式解決方案。
2023-05-25 16:53:3012965 
vMAP 是一種基于神經場的對象級密集 SLAM 系統,可根據 RGB-D 輸入流實時自動構建對象級場景模型。
2023-06-15 09:29:131591 
+AIOT+5G撬動藍海市場◇中國超級電容保持高速增長——關注我們,獲取更多報告——電子元器件采購一站式服務平臺關注華秋商城,發現更多價值點擊閱讀原文,查看海量研報、
2022-02-15 11:31:471044 
配線架在綜合布線中起到整理各類線纜的作用,不光能提供一個整潔的環境,對于線纜的壽命和效果也是很有幫助的,下面就跟著科蘭通訊小編一起來搞懂配線架相關知識。 配線架套什么定額 配線架套用綜合布線中的機柜
2023-08-04 10:02:492302 
Scala里面的隱式轉換的好處是靈活,壞處就是太靈活。
2023-08-19 10:45:451209 
近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前研究的一大熱點,今天我們就來詳細聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:115454 
SLAM(Simultaneous Localization and Mapping)同步定位與地圖構建,一種同時實現設備自身定位和環境地圖構建的技術。
2023-09-20 10:59:594920 
神經輻射場作為近期一個廣受關注的隱式表征方法,能合成照片級真實的多視角圖像。但因為其隱式建模的性質,用戶難以直觀編輯神經輻射場建模對象的幾何。面對這一問題,最新被IEEE TPAMI接收的論文
2023-11-20 16:56:331329 
提出了一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統,該系統由完整的前端和后端模塊組成,包括里程計、回環檢測、子圖融合和全局優化。
2023-11-29 10:35:181505 
同步定位與地圖構建 (SLAM) 是計算機視覺中的一個基本問題,旨在在同時跟蹤相機姿勢的同時對環境進行地圖構建。基于學習的密集 SLAM 方法,尤其是神經輻射場 (NeRF) 方法,在捕獲密集光度
2024-11-11 16:17:301351 
仍未得到探索。本文提出一種基于立體相機的三維高斯潑濺大規模視覺SLAM系統LSG-SLAM。通過在EuRoC數據集上的廣泛評估,LSG-SLAM展示了其在大規模室外場景中的優越性能。在KITTI數據集上,LSG-SLAM達到了優于現有神經網絡、基于3DGS以及傳統方法的性能。
2025-05-27 14:13:251356 
當機器學會"看懂"道路 在自動駕駛領域,一場靜默的革命正在顛覆傳統認知。2023年以來,產業界悄然興起一股新趨勢——隱式地圖。這種技術不再依賴傳統的高精地圖或輕量地圖,而是讓神經網絡像人類大腦一
2025-11-19 09:26:27302 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論