 SLAM市場快速增長,SLAM芯片或成行業新風口?
SLAM市場快速增長,SLAM芯片或成行業新風口?

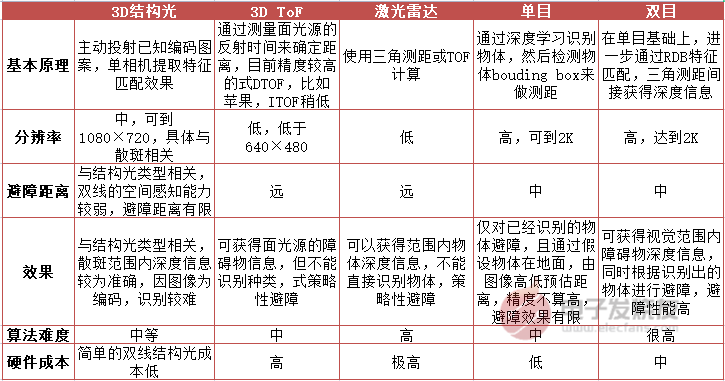
SLAM技術應用與技術對比
市場規模發展與上下游分布
相關的SLAM芯片廠商

寫在最后


更多熱點文章閱讀
最高漲幅25%,AMD宣布上調Xilinx FPGA售價,供應短缺讓TOP 2廠商受益 時隔20年,莫斯科人汽車再次復產,背后全是中國車企的影子 歐盟超430億歐元投向芯片領域,對上游半導體設備有何影響? 24W以下電源,新型自供電BJT方案將全面取代其他方案? 車用芯片不再缺?芯片大廠表示有所緩解,真實情況究竟如何呢?
原文標題:SLAM市場快速增長,SLAM芯片或成行業新風口?
文章出處:【微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電子發燒友網
+關注
關注
1013文章
544瀏覽量
167354
原文標題:SLAM市場快速增長,SLAM芯片或成行業新風口?
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
SLAM如何為自動駕駛提供空間感知能力?
,并精準地判斷自己與障礙物的距離。這種看似本能的空間感知能力,在工程學領域被具象化為同步定位與地圖構建技術,即我們常說的SLAM。在自動駕駛的發展進程中,SLAM不僅是車輛在未知環境中“生存”的技能,更是其實現厘米級高

什么是激光雷達 3D SLAM技術?
在智能移動設備自主運行的賽道上,激光雷達3DSLAM技術正成為破局關鍵,但多數人對其認知仍停留在表層。要讀懂這一核心技術,不妨先回溯“SLAM”的本質——SLAM


FPGA和GPU加速的視覺SLAM系統中特征檢測器研究
特征檢測是SLAM系統中常見但耗時的模塊,隨著SLAM技術日益廣泛應用于無人機等功耗受限平臺,其效率優化尤為重要。本文首次針對視覺SLAM流程開展硬件加速特征檢測器的對比研究,通過對比現代SoC平臺

自動駕駛中如何將稀疏地圖與視覺SLAM相結合?
通過相機估計自身位置,一邊在未知環境中構建或更新地圖。將兩者結合的目的其實非常明確,利用預先構建好的稀疏地圖作為先驗信息,讓在線運行的視覺SLAM實現更穩定、更精準的定位,同時使地圖能夠重復使用和持續維護,避免每次都從頭

全新輕量級ViSTA-SLAM系統介紹
無需相機內參、極致輕量的前端(前端模型大小僅為同類35%),實時單目視覺SLAM,ViSTA-SLAM。與現有方法相比,ViSTA-SLAM不僅更輕、更快,在相機跟蹤和密集3D重建質量方面也均表現出色。

上海海思朱雀專業電競顯示解決方案推動行業快速發展
這場電競狂歡賽場上,各類頂尖電競裝備的身影隨處可見,這是新一輪電競市場快速增長的縮影,市場的快速增長則帶動如顯示器、鼠標、手柄、耳機等電競裝備升級。
一種適用于動態環境的自適應先驗場景-對象SLAM框架
由于傳統視覺SLAM在動態場景中容易會出現嚴重的定位漂移,本文提出了一種新穎的基于場景-對象的可靠性評估框架,該框架通過當前幀質量指標以及相對于可靠參考幀的場景變化,全面評估SLAM的穩定性。

基于深度學習的增強版ORB-SLAM3詳解
ORB-SLAM3雖是當前最先進的SLAM之一,但由于使用傳統的ORB(定向FAST和旋轉BRIEF)特征,在尺度、旋轉和光照發生顯著變化時可能會表現出局限性。

一種適用于動態環境的實時RGB-D SLAM系統
近期用于視覺SLAM的3D高斯潑濺(3DGS)技術在跟蹤和高保真建圖方面取得了顯著進展。然而,其順序優化框架以及對動態物體的敏感性限制了其在現實場景中的實時性能和魯棒性。為此,我們提出

一種適用于動態環境的3DGS-SLAM系統
當前基于神經輻射場(NeRF)或3D高斯潑濺(3DGS)的SLAM方法在重建靜態3D場景方面表現出色,但在動態環境中的跟蹤和重建方面卻面臨著挑戰。

三維高斯潑濺大規模視覺SLAM系統解析
近期興起的神經輻射場(NeRF)與三維高斯潑濺(3DGS)技術在視覺SLAM中展現出令人鼓舞的突破性成果。然而,當前主流方法多依賴RGBD傳感器,并且僅適用于室內環境。在大規模室外場景中的重建魯棒性

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
視覺巡線,展示了如何從數據采集、模型訓練到機器人部署的完整流程。
值得注意的是,深度學習模型的實時性對機器人計算資源提出了較高要求,優化模型(如TensorRT加速)是實際部署的關鍵。
二、SLAM
發表于 05-03 19:41
中國智能手機復合材料后蓋搭載量快速增長
“2023年智能手機品牌紛紛加碼復合材料后蓋,而在此之前國內市場智能手機后蓋材料中玻璃和塑料滲透率高達90%以上,目前復合材料后蓋搭載量快速增長,至2024年其滲透率已增至約10%,成為市場新
一種基于點、線和消失點特征的單目SLAM系統設計
本文提出了一種穩健的單目視覺SLAM系統,該系統同時利用點、線和消失點特征來進行精確的相機位姿估計和地圖構建,有效解決了傳統基于點特征的SLAM的局限性。




 工商網監
工商網監
評論