目前,實現AEB的主流技術主要有兩種,第一種是靠單目/雙目攝像頭采集圖像,識別障礙物并作出剎車指令的“視覺派”;第二種是靠毫米波雷達判定前方障礙物,測量與障礙物的相對運動趨勢并作出剎車指令的“雷達派”。
2016-11-07 13:53:56 4311
4311 通過《ADAS都這么熱門了,你還不了解毫米波雷達?》我們已經了解到毫米波雷達將率先成為ADAS系統主力傳感器。不過,雷達在辨別非金屬障礙物如行人方面卻無能為力,攝像頭卻能以更好地辨別道路上的標識,行人等信息。接下來我們一起來了解一下ADAS中的另一個重要傳感器——車載攝像頭以及車載全景影響系統。
2017-03-15 10:14:4518210 隨著攝像頭系統在車輛中的應用日趨普遍,對改型儀表板錄像機(行車記錄儀)、輔助駕駛、報警攝像頭、倒車攝像頭以及夜視系統的需求也與日俱增。 由于消費者對這些系統的功能需求日益增多,所以各種新型攝像頭技術
2018-07-30 09:36:176952 如今,車載攝像頭已經不再僅僅是一個輔助設備,而是逐漸成為了智能駕駛系統中不可或缺的一部分。360度全景監控、行車記錄儀以及自動駕駛輔助功能,車載攝像頭的應用范圍不斷拓展,技術也在不斷創新。它能夠識別道路標志、檢測障礙物、監控駕駛員狀態,甚至與其他車輛和交通設施進行通信。
2024-12-18 11:07:072077 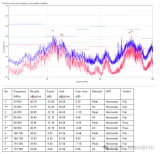
根據Omdia估計,2023年全球安防攝像頭市場(高清模擬攝像頭、網絡攝像頭、防爆攝像頭和熱成像攝像頭)總體發貨量約為1.9億臺,預計到2028年,總體發貨量將達到2.6億臺。2023年,中國的發貨
2025-02-27 15:39:121821 
前置的傳感器,如攝像頭或毫米波雷達來確認車輛正前方的可通行區域內是否有車輛。如果有車輛,則在安全制動距離內跟車,如果沒有車輛,則加速到設置的巡航速度。注意這里要特別強調“車輛正前方”,也就是車頭的直線
2016-12-09 17:17:54
傳感器類型:我們常說的數碼攝像頭的傳感器相當與傳統相機的膠片,傳感器是數碼攝像頭的核心,也是最關鍵的技術,它是一種用來接收通過鏡頭的光線,并且將這些光信號轉換成為電信號的裝置。目前數碼攝像頭的核心成像部件有兩種:一種是 CCD (電荷藕合)元件;另一種是 CMOS (互補金屬氧化物導體)器件。
2019-08-15 06:04:15
本章將介紹計算機視覺中最核心傳感器-攝像頭的基本使用,主要講解了CSI攝像頭,USB攝像頭,網絡攝像頭的基本使用。
2020-11-06 06:47:57
,此外它在自動曝光/增益/白平衡/色彩/噪點控制/伽瑪校正以及動態縮放邊緣抗鋸齒算法方面都有獨到之處,圖像轉換速度也非常快。據了解,為保證攝像頭基礎畫質和產品穩定,極速緊跟中星微步伐,已推出30萬像素
2009-04-14 11:38:35
)的攝像頭傳輸的視頻證據,自動將車牌數據與違規或爭執事件相關聯。只需按下攝像頭上的按鍵,執法人員就能觸發視頻記錄。AutoVu平臺與配置ALPR系統的車輛與隨身攜帶的專用攝像頭相關聯,將視頻剪輯與車牌
2018-11-09 16:03:53
會用到。智能小車測距可以及時發現前方的障礙物,使智能小車可以及時轉向,避開障礙物。原理:1.給超聲波模塊接入電源和地;2.給脈沖觸發引腳(trig)輸入一個長為20us的高電平方波;3.輸入方...
2021-12-01 06:09:43
具體知識內容:*** 攝像頭原理+OV7670開發手冊* IIC通信(軟件)* OV7670初始化程序和獲取圖像程序* lcd液晶初始化程序* 主函數編寫**整體開發流程:一.攝像頭成像,組成
2021-08-09 07:31:16
USB 攝像頭FA-CAM202NanoPi M3,USB攝像頭,X710屏,串口wiki資料鏈接:http://wiki.friendlyarm.com/wiki/index.php
2016-12-01 17:44:38
u***攝像頭CameraHal支持熱吸納的設計該怎樣去實現呢?
2022-03-03 06:44:39
請教大神,我有一個u***攝像頭(也可買直接視頻輸出的那種攝像頭),有線連接也想過,想把它改成可以實時監控水下魚情的無線攝像頭(有線的挑手機型號,很多手機不能用。)攝像頭通過u***連線連接水面的有
2018-01-31 23:26:08
顯示小車搭載攝像頭拍攝的視頻圖像功能;(4)實現探障智能車自動避讓前方障礙物的功能(詳見演示視頻)。五、附件附一:程序工程文件(完整的程序代碼)附二:硬件工程文件(完整的硬件工程文件,包括原理圖
2014-01-11 10:57:49
在下不才,做過幾個智能小車,能實現巡線,壁障等功能,下一步想做攝像頭巡線小車,就是用攝像頭捕捉前方畫面,單片機處理,并把畫面通過無線通信傳到電腦上,哪位大神能幫我講解下整個過程????1:攝像頭模塊
2013-02-24 19:46:19
前視主動安全攝像頭(Forward Active Safety Camera,FAS-Cam)是北京經緯恒潤科技有限公司(HiRAIn)整合Mobileye、Infineon、Elektrobit等
2020-12-16 06:39:03
雙目攝像頭可以計算長度,那么他可以計算出高度或者對障礙物的距離嗎?還有他是怎么計算長度的,有沒有公式
2023-09-28 06:55:56
`回收手機攝像頭,大量收購手機攝像頭!!! 帝歐電子 趙先生 TEL:135-3012-2202 QQ:879821252 帝歐電子專業電子收購,現急購攝像頭,大量回收攝像頭!手機攝像頭高價收購
2021-07-05 11:01:56
回收蘋果攝像頭 收購蘋果攝像頭回收蘋果攝像頭,大量收購蘋果攝像頭!!! 帝歐電子 趙先生 TEL:135-3012-2202 QQ:879821252 帝歐電子專業電子收購,現急購攝像頭,大量
2020-12-29 18:14:00
通過攝像頭對周圍環境信息的實時采集,如果當鏡頭前方出現障礙物時候,以一定的方式(聲音或振動之類的)反饋出來。主要考慮的是實現盲人室內導盲作用,不需要太過于考慮實際使用,只要能實現判定到障礙物,自動提醒就行啦。怎么判定前方出現障礙物,一直困擾著我。求大神指個思路,能有程序框圖就更好了
2017-03-14 07:58:55
摘要:本文提出了一種基于單片機控制的超聲波定位前方物體的監測控制系統。通過一左一右的雙超聲波接收頭檢測信號,送單片機進行數據計算處理,能夠精確計算與障礙物的距離,同時判斷該障礙物是否位于車輛行徑
2018-11-02 10:47:01
文章根據目前車輛夜間遠近光切換不及時,易造成車輛前方非機動車駕駛員和行人產生炫目的現象,提出了一種利用紅外攝像技術和毫米波雷達測距技術的自適應遠光燈控制系統。該系統利用紅外攝像和雷達獲取車輛前方的路面信息,通過控制器的內置算法計算出車輛當前時刻以及下一時刻的遠近光照明狀態
2022-03-25 10:27:33
攝像頭成像的原理是什么?攝像頭的基本結構是如何構成的?如何去開發一種基于stm32和OV7670的攝像頭呢?
2021-11-15 06:54:21
廣州市山行電子有限公司是一家專業從事汽車電子研發、生產和銷售的高科技企業。現在的核心產品為車載攝像頭、360度全景監控系統、特種車輛監控系統、行車記錄儀和車載顯示器等。 聯系方式:400-8727929。
2014-06-03 14:11:51
。如果主機檢測到超時(取決于應用要求),主機固件可以重新發送命令,或者通過發送 RESET 命令來復位攝像頭。配置攝像頭以實現人臉識別啟動 B5T-007001 之后,首先必須對其進行配置,讓它能夠在
2018-08-01 10:10:48
我和隊友想做一個反恐偵察車,主要功能就是在小車前面放一個紅外攝像頭,遠程監控,將小車放置到一個陌生的環境,比如黑暗的***的老巢,四周的地形比較復雜,小車上加個激光測距的裝置,實時測量離四周障礙物
2016-09-25 23:28:00
現在汽車倒車刮擦事件很多,甚至撞到人或車,現在攝像頭多為靜止的,想做一個可轉動的攝像頭,就象人眼一樣幾個角度掃描,后來想到后視鏡電機,用后視鏡電機組件接上攝像頭,按鈕放在駕駛室內,不知可否。
2017-07-30 14:08:47
,也向測量邏輯電路提供一個短脈沖。最后由信號處理裝置對接收的信號依據時間差進行處理,自動計算出車與障礙物之間的距離。超聲波測距原理簡單,成本低、制作方便,但其在高速行駛的汽車上的應用有一定局限性,這是
2012-10-21 11:13:31
選擇 無線監控攝像頭點位在選擇的時候盡量選擇遮擋物較少的區域,避免信號干擾。無線信號是通過電磁波在空中傳輸的,攝像頭與路由器之間的障礙物會對信號傳輸造成很大衰減,比如承重墻、隔墻、擋板、家具等,穿過
2020-12-11 13:49:51
和 CRC 可以在軟件加密的基礎上提供 3 至11 倍的性能提升,可用于小粒度加密技術。隨著 Arm 繼續提高關鍵加密操作的性能,智能攝像頭能夠持續改進其加密算法,以支持物聯網應用對隱私和安全的持續需求。圖
2022-01-11 08:00:00
時間和簡潔性方面更勝一籌。 相對而言,它也不受環境光條件變化影響。很容易想象,如何在汽車裝置中使用 TOF 3D 攝像頭,為倒車攝像頭系統提供更為精細的數據,以辨別倒車車輛和路上任何障礙物之間的距離。 TOF
2017-04-12 14:44:45
檢測障礙物有什么什么傳感器,用紅外反射還是超聲波測距,或者還有其他傳感器?
2023-11-08 06:33:49
,具有交通計數與分類、事件檢測、應急車道占用、與攝像頭聯動執法等功能。長距雷達可在高速行駛環境下感知遠距離障礙物,角向雷達輔助車輛感知周圍信息,為變道超車、自動巡航、防止碰撞、列隊行駛等提供感知信息。車內
2020-07-01 14:16:38
本帖最后由 gk320830 于 2015-3-8 14:20 編輯
急需用到2米內障礙物感應器,帶開關功能或者高手幫忙設計個輔助開關電路,24V電源供電,多謝
2013-03-07 21:58:40
求購可以量產的攝像頭測距方案,量程約2-10cm。聯系方式:2282759853
2016-07-21 17:17:49
。8,可探測企圖接近車身的行人二,解決方案,實現如下: 主要有測距系統、信息處理系統和剎車執行系統三部分組成。 測距系統:該系統采用攝像頭圖像處理技術,經過嚴謹的科學論證、精確的計算研制而成,他的主要
2012-04-25 16:39:57
、控制電路、鍵盤電路和報警電路組成,其特征為:★ 以MCS-51單片機為控制核心。★ 報警電路采用嘀嘀聲加閃光報警。★ 用數碼管顯示前方障礙物的距離。★ 防護距離可以人為設置。該系統的指標
2013-07-21 21:58:27
和高分辨率的地圖相結合,做出不同的數據模型; 安裝在前擋風玻璃上的攝像頭可以讓汽車發現障礙物,閱讀街道標識,識別交通信號燈; 汽車的后視鏡附近安置了一個攝像頭,用于識別交通信號燈,并在車載電腦的輔助下辨別
2014-03-13 18:09:55
:監控攝像頭十大品牌有哪些?一、海康威視HIKVISION:中電海康集團旗下,監控設備行業知名品牌,致力于以視頻為核心的物聯網解決方案和數據運營服務提供商。二、霍尼韋爾安防Honeywell:隸屬于霍
2022-03-17 12:04:10
一般的紅外只能在沒有障礙物的情況下成像,有沒有可以穿障礙物的紅外成像技術,我們想用在消防救援上面。
2020-08-11 11:18:09
異物入侵與否,有效中斷無線電力傳輸,并將相關訊息發送至客戶端,避免導電產生安全問題,以提升系統安全性。行人識別系統,使用視覺傳感器模塊識別,可識別出5~25公尺范圍內的行人,未來將擴充可識別出車輛、機車和腳踏車等障礙物。搭配用來測距的雷達后,可升級為自動緊急剎車系統。`
2017-05-15 17:49:20
你們好:懂了一單片機常識,現想做可晃頭攝像頭,因為倒車看不到后面容易碰到東西,后視鏡是有盲區的。做一個鍵盤,可操控攝像頭往后盲區掃描,在屏幕上動態顯示后方情景,可調移動速度,方向,就像人眼往后面掃描,用步進電機可以嗎?
2016-07-23 02:46:37
的剩余驅動操作。接下來,朋友為使用方便,又順便將攝像頭隨機配帶的應用程序安裝到計算機系統中后,朋友看到出現在顯示器屏幕上的成像畫面竟然是大片的滾動花屏,只有顯示器頂部的一小片區域畫面顯示正常。遇到這種現象
2010-03-16 09:53:24
Infrared Proximity Sensor如何檢測前方是否有障礙物
2020-11-06 07:57:22
文章目錄超聲波測距一、HY-SRF051.短的介紹2.引腳介紹二、實現思路三、部分代碼1.Trig、Echo的初始設置2.讀入數據總結超聲波測距超聲波測距模塊可以讓我們大致檢測到前方的障礙物以及大致
2021-08-06 06:35:42
隨著汽車攝像頭技術的發展,其分辨率、動態范圍和幀速率越來越高,電源架構需要根據具體的用例需求進行調整。在本文中,我將回顧三種可用于為汽車攝像頭模塊供電的策略:全離散全集成部分集成本文重點介紹小外形
2022-11-07 06:40:29
遇障礙物時語音提示前方危險,請注意。語音模塊是isd1820單片機51 求幫忙
2017-02-24 21:43:00
為什么有些東西,遇到障礙物會自動返回,是哪一種傳感器嗎?哪里有沒有這類的電路圖介紹下,非常感謝
2011-09-10 21:14:25
成像對于許多機器人應用至關重要,能讓機器人執行基本任務,躲避障礙物,進行導航以及確保基本安全。 顯然,提供成像的方式是采用低成本視頻攝像頭,或者再好點,使用兩個攝像頭實現立體視野和深度感知。 但后者
2020-11-27 06:20:37
),超聲波傳感器可以用來準確測距,但若將其應用在小車防撞系統中,由于障礙物呈柱狀,而超聲波發射頭有一定的散射角(左右),因此即使障礙物不在小車正前方,超聲波仍能檢測到斜前方回波,這就給智能控制車輛行進帶來困難和誤導,為了解決這一問題,我們提出了一種使用雙接收頭的方案,并從實用角度給出了一套具體控制策略。
2020-03-19 08:26:28
監控車輛內外環境以輔助駕駛員安全行駛。隨著高階智能駕駛ADAS、360環視、車道保持輔助LKA、行人AEB、駕駛員監控系統DMS等功能滲透率的提升,單車攝像頭平均
2024-12-05 15:54:49
障礙物檢測實驗
一、實驗目的“旋風”小車在運動過程中要成功避開障礙物必須在一定距離外就探測到障礙物。在小車上探測障礙物
2009-03-23 10:47:293548 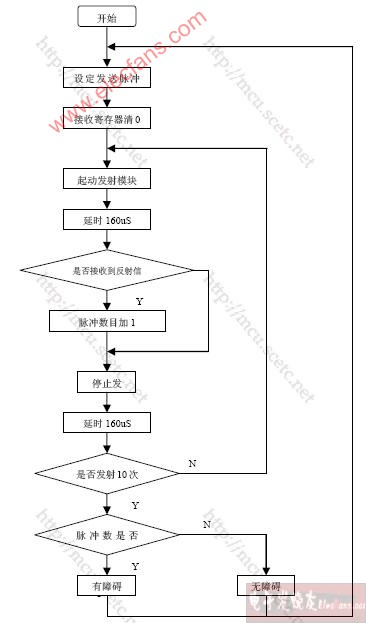
障礙物方位檢測實驗
一、實驗目的小車在運動中要成功避開障礙物,除了要檢測是否有障礙物外,還需要判斷障礙物的方位,以便小
2009-03-23 10:48:532268 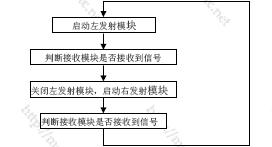
數碼攝像頭成像距離 要了解攝像頭的成像距離需要引進一個超焦距的概念。超焦距是指對焦點以
2009-12-22 13:51:071323 DIY基于攝像頭的激光測距儀。
2016-05-05 11:12:26 67
67 一個黑客團隊采用多種方式,成功愚弄了特斯拉無人駕駛儀,讓它以為前方的障礙物并不存在。試想一下,如果這個障礙物是行人,或者是一輛高速行駛的大型車,結果會是怎樣?
2016-08-08 10:52:471297 據外媒報道,自動駕駛車輛配置的多款攝像頭,旨在用該設備探查道路上的障礙物并繪制車輛周邊環境。在各類傳感器中,在功能方面,激光雷達傳感器與人眼最為接近,其光探測和測距系統(detection and ranging system)與雷達類似,但其采用了光波替代了無線電波(radio waves)。
2018-10-03 10:38:002809 24 GHz雷達通過障礙物探測和測距提供安全性。
2018-06-04 03:47:004838 據外媒報道,FenSens打造了一款無線停車傳感器,可取代傳統的車牌架(traditional license plate bracket),可探查車輛前方十米內的目標物。該產品還采用了藍牙4.1來
2018-06-08 07:59:001984 麻省理工學院最新發布的新研究視頻顯示,該學院研制的Cheetah 3獵豹機器人不需要直視而爬上樓梯臺階。視頻顯示,這個90磅重的機器人配備了新的算法,即使沒有攝像頭的幫助也可以躲避障礙物,機器人通過觸感來適應整個環境并完成任務。
2018-07-08 10:07:543585 以前提過單目測距的問題,檢測的障礙物2-D框加上攝像頭的姿態和路面假設。
2019-06-13 17:19:528715 
在這三個鏡頭成像裝置中,每個均擁有針對不同用途的特定視野。 目前大多數最新車型中都配有這種標準的單眼攝像頭,用于自主緊急制動和行人探測;另一個鏡頭針對遠距離、交通標志和交通燈以實現高速公路自動駕駛;第三個攝像頭用于監測汽車前方區域。
2019-08-09 10:45:157222 
在正常情況下,Adasky研發的熱成像攝像頭技術主要用于駕駛輔助系統和自動駕駛車輛。不過,近日,該公司領導和軟件工程師們開了一次頭腦風暴會議,討論如何利用該技術幫助打敗COVID-19。
2020-04-29 10:46:024150 汽車攝像頭模塊設計人員必須在縮短上市的同時,創建更小的攝像頭模塊設計,這些設計可擴展并可重復用于各種類型的圖像序列化器和傳感器。在本文中,將解決汽車攝像頭模塊設計的幾個關鍵設計挑戰,包括設計簡化和平臺可擴展性。
2020-06-29 17:06:592838 據外媒報道,為移動機器提供高端控制系統、堅固接口和物聯網解決方案的領先供應商TTControl宣布在全球推出最新款顯示屏——Vision 3。該產品具有多個接口,經過設計可位于復雜車輛系統架構的中心
2020-07-20 11:09:121001 據外媒報道,自動駕駛車輛配置的多款攝像頭,旨在用該設備探查道路上的障礙物并繪制車輛周邊環境。
2020-12-25 13:35:22771 避免障礙物(即墻壁或前方的物體)的Arduino控制汽車。 ? ? ? ? 責任編輯:xj 原文標題:基于Arduino的避障車 文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。 ?
2020-12-25 14:55:462022 據The Information的最新報道,亞馬遜計劃在其送貨車輛中安裝高科技視頻攝像頭,以便更好地監控司機在運送包裹時的行為。這些硬件和軟件將由Netradyne提供。Netradyne是一家加州公司,其擁有一個名為Driveri的平臺,該平臺使用攝像頭和人工智能來分析司機操作車輛時的行為。
2021-02-04 14:36:241765 面對日益加強的法律法規,前視主動安全系統將逐漸成為五星安全等級車輛的必須配置。前視主動安全攝像頭安裝在前風擋玻璃后面,僅通過單目圖像處理即可獲取車道線,跟車車輛,會車車輛,前方行人,交通標志等多種
2021-05-19 08:59:263340 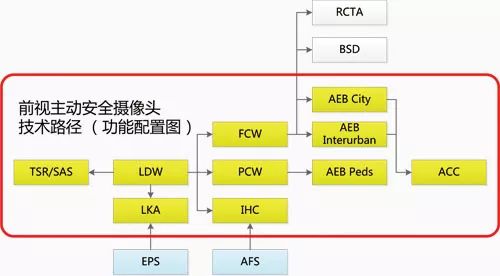
攝像頭獲取的圖像包括行人、其他車輛、動物或障礙物,這不僅對特斯拉車輛駕駛員的安全很重要,對其他人也很重要。
2021-06-26 14:04:4710758 
本車A,前方車B和C,攝像頭P焦距f,高度H,和障礙物B/C距離Z1/Z2,B/C檢測框著地點在圖像的投影是y1/y2。那么y=fH/Z,所以Z=fH/y。下面是三個不同距離的估計結果:
2023-04-20 09:57:231872 時必須克服一些獨特的挑戰。目標車輛包含感知車輛周圍環境的傳感器。在泊車過程中,目標車輛必須靠近動態障礙物,如行人和其他車輛,以及靜態障礙物,如柱子和電線桿等。為了適應泊車位,還可能需要穿過較低的障礙物,如車輪護欄和路緣石。 觀看? NVIDIA DRIVE Lab
2023-07-13 21:15:011508 
可以檢測到這種情況,從而采取相應的應急措施。紅外熱成像系統如何降低駕乘人員和第三方的出行風險避免碰撞紅外熱成像系統可以在遠距離預警可能的障礙物,使駕駛員或自動駕駛
2023-07-19 17:11:421354 
車載攝像頭防水檢測的重要性 1、保證安全:車載攝像頭的防水檢測對保障車輛安全具有重要作用,如果車載攝像頭的防水性能不足,可能會對車輛的安全造成影響,甚至可能導致車輛出現故障。 2、提高攝像頭
2023-07-21 10:41:442263 完整的前置攝像頭系統視野廣闊,水平視角為120°,垂直視角為48°,既能遠程感知車輛前方超過160米的障礙物,也可檢測車輛側面物體,如交通信號燈、應急車輛和匯入車輛。
2023-09-11 17:47:441441 以前提過單目測距的問題,檢測的障礙物2-D框加上攝像頭的姿態和路面假設。以下根據公開發布的論文討論具體的算法。
2024-01-11 10:47:041461 
攝像頭是一種利用透鏡和圖像傳感器的設備,能夠將光學圖像轉化為電子信號,并將其傳輸到電腦或其他設備上進行記錄和處理。攝像頭的工作原理主要涉及透鏡成像原理和圖像傳感器的工作原理。 首先我們來介紹透鏡成像
2024-02-01 15:01:053757 此項技術創新性在于,通過利用安裝在移動機器人前方的TOF攝像頭,可以獲取探測視角范圍內的目標障礙物的深度圖像,并據此計算出目標障礙物的深度信息及尺寸大小。
2024-04-12 10:19:14942 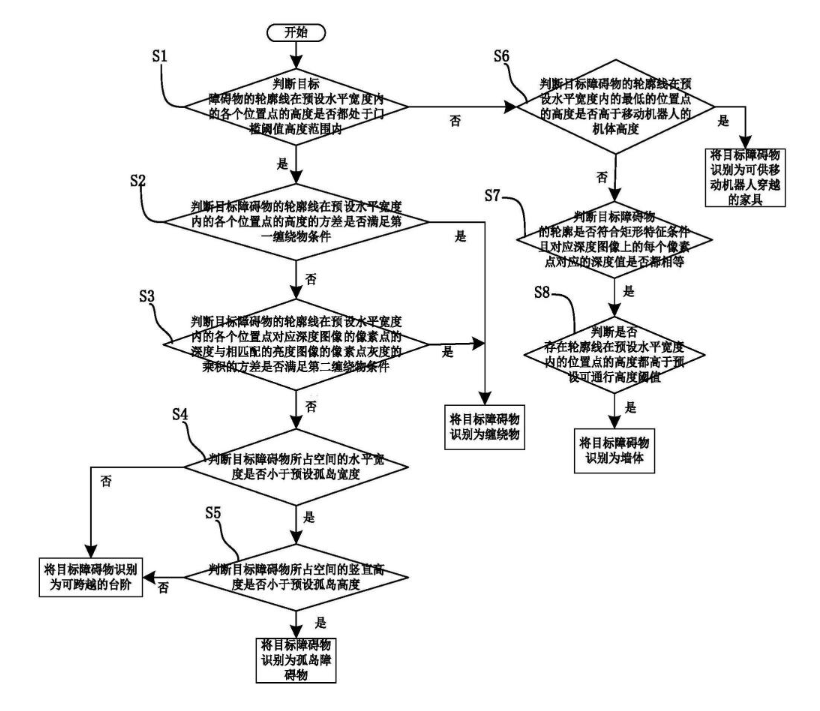
自動駕駛汽車識別障礙物是一個復雜而關鍵的過程,它依賴于多種傳感器和技術的協同工作。這些傳感器主要包括激光雷達(LiDAR)、雷達、攝像頭以及超聲波雷達等,它們各自具有不同的工作原理和優勢,共同為自動駕駛汽車提供全面的環境感知能力。以下是對自動駕駛汽車如何識別障礙物的詳細闡述。
2024-07-23 16:40:243754 電子發燒友網站提供《Jacinto 7攝像頭捕捉和成像子系統.pdf》資料免費下載
2024-08-28 10:48:210 本文介紹了攝像頭及紅外成像的基本工作原理,攝像頭可以將看到的圖像真實的呈現出來,所見即所得! 攝像頭如何工作? 攝像頭可以將看到的圖像真實的呈現出來,所見即所得。 ? 比如人眼看到的一座山的風景
2024-11-25 09:28:084414 
。它能夠識別道路標志、檢測障礙物、監控駕駛員狀態,甚至與其他車輛和交通設施進行通信。 下面分享一個關于車載攝像頭的EMC問題案例。 ? 二實際案例 下圖為某款車載攝像頭通過車載國標三輻射測試的數據,我們可以看到在48MHz到68MHz左
2024-12-18 11:11:492164 [首發于智駕最前沿微信公眾號]自動駕駛車輛的攝像頭是感知模塊的重要組成,其成本低、分辨率高且能捕捉豐富的語義信息,使其在車道識別、障礙物檢測、交通標志和信號燈識別等任務中不可或缺。不同類型的攝像頭
2025-05-05 09:59:281064 
[首發于智駕最前沿微信公眾號]想要讓車輛知道前方有什么、距離多遠、是否可以靠近,首先要做的是讓其“看”清楚環境。在眾多車載感知硬件中,與人類看到世界最類似的一個感知硬件便是車載雙目攝像頭了。 圖片
2025-11-13 09:17:231143 
的小障礙物,自動駕駛汽車真的要檢測嗎?如果要檢測,是如何檢測的? 自動駕駛視覺系統都在看什么? 自動駕駛汽車要“看見”周圍環境,是靠一系列傳感器來完成的,其中最核心的一個就是攝像頭。攝像頭采集到實時圖像之后,自
2025-12-24 16:53:00908 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論