 電子發燒友App
電子發燒友App




2.2脈沖控制實現運動過程
利用脈沖控制電機速度即利用脈沖頻率決定電機速度。這種方法能夠得到較高的運行精度,適用于三坐標機電機控制系統。首先,上位機給定運行速度,命令傳到單片機,單片機進行計算,獲得單位脈沖周期內需要時鐘數,再將數據傳入FPGA,由其相應模塊處理。FPGA中相應的處理模塊實現的基本原理是:根據單片機給出的時鐘數進行判定。程序開始運行,開始計數周期,時鐘數目不斷累加,當累加數目到達單片機給定值的時候完成一個計數周期。然后計數器清零,重新開始計數,輸出信號狀態翻轉。程序如下所示:
if(cnt>=currentSpd)
begin
puls<=~puls;
cnt<=25’h1;
end
else
cnt<=cnt+1’b1;
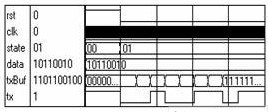
其中cnt為計數器,currentSpd為單片機計算所得的時鐘數,puls為輸出脈沖。電機運動加速的過程就是一個脈沖頻率逐漸加大的過程,也就是說單位周期內時鐘數量逐漸增加的過程。相應的減速過程與之相反。勻速過程則是一個以給定頻率保持不變的運動過程。下圖便是一個勻速、減速的仿真結果。







































 工商網監
工商網監
評論