調(diào)節(jié)系統(tǒng)投自動:往往在控制方案確定好且判斷出調(diào)節(jié)器的正/反作用后,最關(guān)鍵的是P、I、D參數(shù)如何整定,根據(jù)多年的現(xiàn)場工作經(jīng)驗,談?wù)勅绾握?b class="flag-6" style="color: red">定調(diào)節(jié)系統(tǒng)的P、I、D參數(shù),請大家在工程中參考。
2022-10-09 14:08:12 4303
4303 本帖最后由 南中南 于 2016-1-6 18:24 編輯
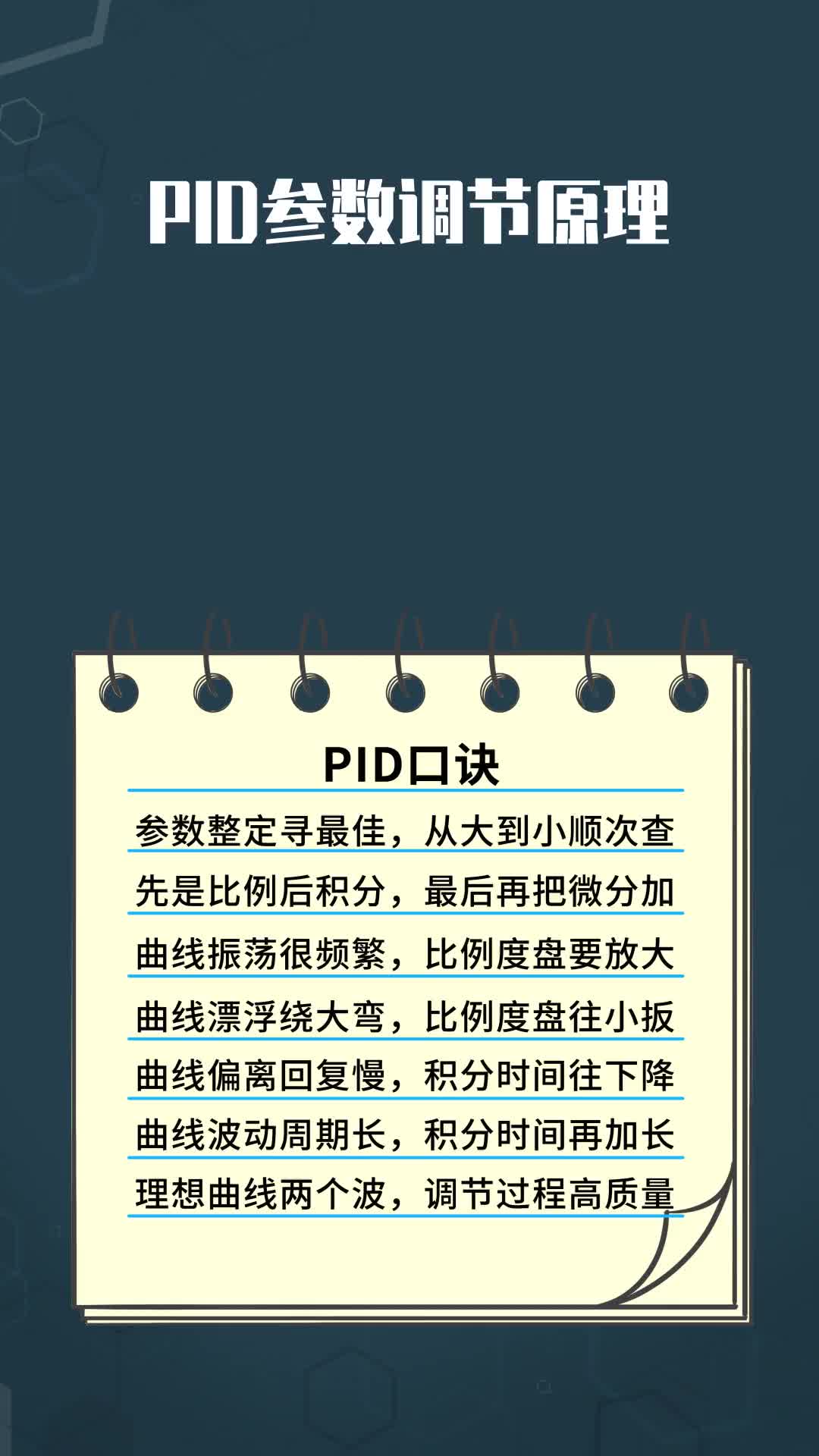
看見網(wǎng)上有人整定了一個PID參數(shù)調(diào)節(jié)的順口溜,很是有趣又實用,發(fā)出來跟大家分享一下參數(shù)整定找最佳, 從小到大順序查。先是比例后積分
2016-01-06 17:58:56
PID調(diào)節(jié)是自動控制領(lǐng)域的經(jīng)典算法。主要有三個參數(shù),即P:比例系數(shù)。I:積分系數(shù)。D:微分系數(shù)。在PID調(diào)節(jié)過程中我們需要知道兩個值:1、系統(tǒng)當前狀態(tài)值(即反饋),即電機轉(zhuǎn)速的實際值。2、期望值。即
2021-09-07 06:38:00
選用單回路PID調(diào)節(jié)器。單回路調(diào)節(jié)器有一路信號輸入,控制設(shè)定及參數(shù)修改通過儀表參數(shù)設(shè)定完成。②正反轉(zhuǎn)控制的電動執(zhí)行機構(gòu)選用的帶伺服放大器閥位控制調(diào)節(jié)器。帶伺服放大器閥位控制調(diào)節(jié)器輸入信號為兩路(測量
2018-01-04 21:14:24
安裝在控制柜面板上,少數(shù)安裝在導(dǎo)軌上許多,安裝迅速。PID調(diào)節(jié)器面板上通常都有LED或LCD顯示器和操作按鈕,工程技術(shù)人員只要具備基本的工程知識即可在數(shù)分鐘內(nèi)完成調(diào)節(jié)器參數(shù)設(shè)置。PLC通常安裝在控制柜
2018-01-06 14:21:54
與控制參數(shù)變化趨勢相反時,其放大系數(shù)為負。 YR-GFD系列人工智能PID調(diào)節(jié)器 為便于記憶,把以上規(guī)定簡記為: 將正作用PID調(diào)節(jié)器記為(+),將負作用控制器記為(-),將氣、電開閥記為(+),氣、電關(guān)
2018-01-03 23:02:14
PID調(diào)節(jié)是什么?
2021-11-10 07:26:52
我用的是pid增量調(diào)節(jié)法設(shè)定溫度是34度調(diào)節(jié)pwm輸出 低電平加熱等溫度達到34度時,輸出為全部高電平這樣導(dǎo)致停止加熱溫度一會又降下來了 然后又重新輸出一定占空比來加熱我想讓溫度穩(wěn)定在34度,不再變化 增量法是不是不行啊?想讓在34度時也輸出一定量的占空比 來補償散熱的那部分溫度
2014-07-10 10:15:10
PID各自對差值調(diào)節(jié)對系統(tǒng)的影響是什么?怎么解決?
2021-10-11 08:12:25
PID控制中有P、I、D三個參數(shù),只有明白這三個參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達最佳控制效果。昌暉儀表在本文給大家介紹PID控制中P、I、D參數(shù)的作用。
比例作用
比例
2023-06-20 06:50:53
PID控制及溫度調(diào)節(jié)程序舉例一、PID控制的定義在工程實際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、 積分、微分控制,簡稱PID控制,又稱PID調(diào)節(jié)。PID控制器問世至今已有近70年歷史,它以其結(jié)構(gòu)
2021-07-02 06:34:44
0即可,此時PID調(diào)節(jié)轉(zhuǎn)換為PI調(diào)節(jié)。如果需要設(shè)定,則與確定Kp的方法相同,取不振蕩時其值的30%。 (4)系統(tǒng)空載、帶載聯(lián)調(diào) 對PID參數(shù)進行微調(diào),直到滿足性能要求。 PID代碼 //定義變量
2018-07-06 06:39:34
。 3.一般步驟 a.確定比例增益P 確定比例增益P 時,首先去掉PID的積分項和微分項,一般是令Ti=0、Td=0(具體見PID的參數(shù)設(shè)定說明),使PID為純比例調(diào)節(jié)。輸入設(shè)定為系統(tǒng)允許的最大值
2016-03-23 10:10:07
。數(shù)碼管顯示具有五種模式,定義如上:模式0:溫度實時值顯示(前1位數(shù)碼管顯示模式,后2位顯示實時溫度值,精確到0.1C//模式1:目標溫度設(shè)定(建議在常溫至65度)//模式2:PID參數(shù)中的P參數(shù)調(diào)節(jié)模式
2015-07-03 16:31:16
根據(jù)應(yīng)用手冊AN-693描述的調(diào)節(jié)PID參數(shù)的方式;第一步是調(diào)節(jié)Kd值,調(diào)節(jié)方式是Kd=2 ;然后每次Kd =Kd*2;每次修改Kd后,手動調(diào)節(jié)電機轉(zhuǎn)軸直到系統(tǒng)出現(xiàn)高頻震蕩,然后增加采樣間隔;但是
2025-01-01 07:30:11
labview用PID調(diào)節(jié)皮帶稱重,流量為速度與瞬時重量的乘積,使流量穩(wěn)定,不斷調(diào)節(jié)速度,該怎么表示
2022-05-04 23:27:22
Matlab是如何用系統(tǒng)辨識并進行PID參數(shù)調(diào)節(jié)呢?有哪些基本步驟呢?
2021-11-19 06:27:42
SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-14 15:14:23
labview pid參數(shù)整定,純比例度調(diào)節(jié)時,I設(shè)為多大?書上說應(yīng)該設(shè)定為無限大,但是這樣設(shè)置,輸出幾乎無變化。
2014-05-14 15:43:03
在labview中有許多PID調(diào)節(jié)的范例,每個范例中有個花盆一樣的子VI是設(shè)備仿真,在實際運用是要用嘛? 這是labview中的范例。這是自己編寫的 水的流量為設(shè)定點和過程量。來調(diào)節(jié)速度的?
2016-12-18 15:48:39
上一篇介紹了建立系統(tǒng)模型的三種方法,這一篇介紹如何調(diào)節(jié)pid,并用MATLAB仿真調(diào)節(jié)pid的目標就是使得從模型中得到的增益能夠使物理系統(tǒng)正常工作調(diào)節(jié)pid的理論分析pid的一般形式如下圖經(jīng)過移動
2021-09-01 07:24:40
【實驗】SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定[hide][/hide]
2017-03-05 10:54:11
一個設(shè)定頻率,一個測量頻率,通過PID調(diào)節(jié)控制DAC寄存器的值,這個DAC12位的,執(zhí)行機構(gòu)通過這個電壓改變頻率,這個PID算法的各個參數(shù)怎么搞出來? //extern int U_Set
2019-08-31 13:53:18
文章目錄是什么是PID參數(shù)調(diào)整增量式PID是什么是PIDP:比例proportionalI:積分integralD:微分derivative參數(shù)調(diào)整Kp:比例系數(shù):讓偏差(目標減去當前)與調(diào)節(jié)裝置
2022-01-20 06:44:16
在調(diào)節(jié)倒立擺時如何將精密電位器的角度值與電機的pwm調(diào)節(jié)聯(lián)系起來,想通過增量式pid算法調(diào)節(jié)倒立擺。還有,pid參數(shù)調(diào)節(jié)有沒有相關(guān)軟件,麻煩推薦一下。O(∩_∩)O謝謝!!!
2017-07-27 10:47:46
整套溫度控制系統(tǒng)選用DAQ板卡控制,通過DO數(shù)字輸出控制加熱絲脈沖加熱,以TC卡鏈接熱電偶,監(jiān)測溫度變化;程序結(jié)構(gòu)如圖:通過初始化PID參數(shù)調(diào)節(jié)出來的波形圖跟理想的PID控制圖完全不一致,問問
2015-05-05 16:20:33
控制系統(tǒng)的基本性能要求及常用性能指標是什么?如何利用MATLAB輔助調(diào)節(jié)PID參數(shù)?
2021-11-19 06:45:04
百度網(wǎng)盤下載地址(970):點擊下載PID電機控制系統(tǒng)設(shè)計:TPWM:電機控制PWM;AS:電機的實際速度;P:為PI參數(shù)調(diào)節(jié);S:設(shè)定的電機速度;+:電機正轉(zhuǎn) -:電機反轉(zhuǎn).四個按鍵,控制P參數(shù)
2021-12-02 08:31:40
法整定PID參數(shù)步驟1、將調(diào)節(jié)器積分時間設(shè)定為無窮大、微分時間設(shè)定為零(即Ti=∞,Td=0),比例度適當取值,調(diào)節(jié)系統(tǒng)按純比例作用投入。穩(wěn)定后,適當減小比例度,在外界干擾作用下,觀察過程變化情況,尋
2017-12-26 21:40:51
我使用的就是經(jīng)典PID,在調(diào)節(jié)D參數(shù)的時候,發(fā)現(xiàn)完全沒有抑制變化的效果,并且很小的值都能引起劇烈震蕩,一開始我以為符號寫反了,但我輸出圖像發(fā)現(xiàn)沒有問題哎,我對控制這一快不怎么了解,求幫助,我控制頻率
2019-05-30 01:24:23
是否有一些調(diào)節(jié)PID參數(shù)的技巧
2023-10-31 08:26:37
調(diào)節(jié)法的優(yōu)缺點(好像這種方法只能給一個調(diào)節(jié)的大概位置,具體參數(shù)值還得繼續(xù)做實驗調(diào)出來)4、頻率響應(yīng)法設(shè)計PID參數(shù)的優(yōu)缺點?5、以及還存在哪些高效實用的PID參數(shù)調(diào)節(jié)方法?熱忱歡迎懂PID控制的知友討論。上述問題如若表述有誤,還請指出來修正。補充:暫且定一個標準:最大過調(diào)量小于10%,調(diào)整時間0.5秒以內(nèi)!
2018-07-30 10:29:20
。 三、參數(shù)調(diào)整一般步驟 a.確定比例增益P確定比例增益P時,首先去掉PID的積分項和微分項,一般是令Ti=0、Td=0,PID為純比例調(diào)節(jié)。輸入設(shè)定為系統(tǒng)允許的最大值的60%~70%,由0逐漸加大
2018-07-30 11:57:24
轉(zhuǎn)帖用經(jīng)驗法整定調(diào)節(jié)器參數(shù)又稱為試湊法,是廣大儀表工數(shù)十年整定經(jīng)驗的積累,是應(yīng)用最為廣泛的一種調(diào)節(jié)器參數(shù)整定方法。它就是根據(jù)儀表工的經(jīng)驗及控制過程的曲線形狀,直接對控制系統(tǒng)反復(fù)地、逐漸地試湊,最終
2017-11-14 09:06:47
用交流電220v加熱銅板控制溫度在32度上下波動不超過0.05度,想通過pid調(diào)節(jié)pwm占空比(低電平就加熱,高電平不加熱)來控制功率。程序重要參數(shù)說明設(shè)定溫度3200放大一百倍pwm加熱是半波加熱
2015-03-14 16:53:53
PID調(diào)節(jié)有哪些訣竅?
2023-10-17 06:12:45
1.直流電機模型 2.PID調(diào)節(jié)參數(shù)的作用:1.比例系數(shù)Kp的作用是加快系統(tǒng)的響應(yīng)速度,提高系統(tǒng)的調(diào)節(jié)精度。2.積分作用系數(shù)Ki的作用是消除系統(tǒng)的穩(wěn)態(tài)誤差。 3.微分系數(shù)Kd的作用是改善系統(tǒng)的動態(tài)
2021-09-07 08:53:57
PID的作用是什么?請問matlab里的pid參數(shù)怎么調(diào)節(jié)?
2021-11-01 07:22:23
增量式pid中的kpkikd對應(yīng)位置式的中的pi d 的值嗎,調(diào)節(jié)增量式pid遇到的問題,請問如何調(diào)節(jié)增量式pid?感謝。
2023-11-09 07:27:41
/thread-32321-1-3.html為了更好的理解這個視頻和PID參數(shù)的作用,特意根據(jù)多軸飛行器的原理和PID理論,編寫了一個EXCEL圖表,直觀的來理解PID參數(shù)的作用。在這個模型中:1、假設(shè)輸出是力,作用在一個質(zhì)塊上
2016-06-08 17:06:55
#include#includefloat incrementSpeed;float speed;int set_shu,fb_shu;//設(shè)置數(shù),反饋數(shù)int pwm;struct _pid
2017-06-22 22:42:58
PID調(diào)節(jié)的實質(zhì)是什么?
經(jīng)常看到有關(guān)PID調(diào)節(jié)問題書籍,看來看去看不懂他們再說什么。還有一些技術(shù)員一提起PID調(diào)節(jié),就搖頭,搞不懂呀!那么PID調(diào)節(jié)的實質(zhì)是什么?通俗
2009-07-04 08:34:22 126
126 目前,PID控制及其控制器或智能PID控制器(儀表)已經(jīng)很多,產(chǎn)品已在工程實際中得到了廣泛的應(yīng)用,有各種各樣的PID控制器產(chǎn)品,各大公司均開發(fā)了具有PID參數(shù)自整
2010-08-18 16:30:3246
簡單的PID調(diào)節(jié)電路
2009-02-25 21:20:052573
簡單的PID調(diào)節(jié)電路
2009-02-25 21:52:432311 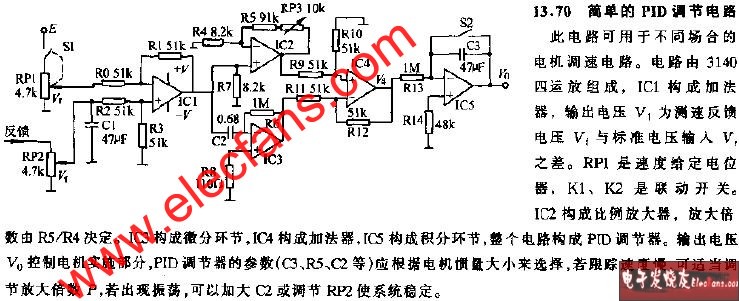
各種智能型數(shù)字顯示調(diào)節(jié)儀,一般都具有PID參數(shù)自整定功能。儀表在初次使用時,可通過自整定確定系統(tǒng)的最佳P、I、D調(diào)節(jié)參數(shù),實現(xiàn)理想的調(diào)節(jié)控
2010-07-20 18:10:571306 本文較詳細地介紹了 PID調(diào)節(jié)器 參數(shù)優(yōu)化設(shè)計原理,提出了一種簡便實用的PID調(diào)節(jié)器優(yōu)化參數(shù)初始值選擇方法
2011-07-18 16:52:13134 2017-03-27 19:21:000 2015-05-16 14:46:0525 2015-08-05 17:02:573 2015-08-24 18:33:3223 2015-09-06 11:38:530 PID調(diào)節(jié)的通俗化理解 用于APM,PID,調(diào)節(jié)。
2016-03-16 09:28:153 A_PID調(diào)節(jié)器的調(diào)節(jié)過程及其參數(shù)的整定方法。
2016-03-31 16:57:3423 PID控制系統(tǒng)的參數(shù)調(diào)節(jié)技巧-2008.
2016-03-31 17:46:3318 PID調(diào)節(jié)器參數(shù)的繼電自整定方法-1998
2016-03-31 17:46:3316 PID調(diào)節(jié)控制電機
2016-11-17 18:35:2313 SLPC可編程調(diào)節(jié)器PID控制參數(shù)整定
2016-12-11 23:15:050 PID調(diào)節(jié)器參數(shù)優(yōu)化設(shè)計的一種改進方法
2017-01-24 16:00:5112 PID調(diào)節(jié)系統(tǒng)PID功能由PID調(diào)節(jié)器或DCS系統(tǒng)內(nèi)部功能程序模塊實現(xiàn),了解與PID調(diào)節(jié)相關(guān)的一些基本概念,有助于PID入門新手快速熟悉調(diào)節(jié)器應(yīng)用,在自動調(diào)節(jié)系統(tǒng)中成功整定PID參數(shù)。
2017-09-19 15:06:409 PID調(diào)節(jié)規(guī)律是自動控制系統(tǒng)中常見而典型的控制策略,其中模擬式PID器是最基本的實現(xiàn)手段與方式。它由比例、積分、微分三種基本電路所構(gòu)成。根據(jù)不同的需求可構(gòu)成比例(P)調(diào)節(jié)、比例積分(PI)調(diào)節(jié)、比例微分(PD)調(diào)節(jié)、比例積分微分(PID)調(diào)節(jié)電路。
2017-11-24 17:34:2329412 
調(diào)節(jié)系統(tǒng)投自動:往往在控制方案確定好且判斷出調(diào)節(jié)器的正/反作用后,最關(guān)鍵的是P、I、D參數(shù)如何整定,根據(jù)多年的現(xiàn)場工作經(jīng)驗,談?wù)勅绾握?b class="flag-6" style="color: red">定調(diào)節(jié)系統(tǒng)的P、I、D參數(shù),請大家在工程中參考。
2018-02-05 15:17:4620162 
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時間和微分時間的大小。
2018-09-14 09:01:137496 在分析增量式數(shù)字 PID基本算法的基礎(chǔ)上,討論了PID調(diào)節(jié)器參數(shù)對控制性能的影響及PID調(diào)節(jié)器控制參數(shù)的整定,并利用具有積分分離和消除設(shè)定值變化沖擊的PID控制算法來實現(xiàn)具有最佳組合的PID控制。仿真實驗結(jié)果表明,經(jīng)該方法整定出的參數(shù)使該控制器獲得了良好的控制效果。
2019-03-01 15:35:043 比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關(guān)系。當僅有比例控制時系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
2019-04-25 08:00:001 經(jīng)常看到有關(guān)PID調(diào)節(jié)問題書籍,看來看去看不懂他們再說什么。還有一些技術(shù)員一提起PID調(diào)節(jié),就搖頭,搞不懂呀!那么PID調(diào)節(jié)的實質(zhì)是什么?通俗的概念是什么?我們通過圖1進行分析。
2019-08-07 08:00:0013 本文檔的主要內(nèi)容詳細介紹的是PID參數(shù)如何設(shè)定調(diào)節(jié)及倒立擺說明匯總與倒立擺程序免費下載
2019-10-29 08:00:008 通常PID調(diào)節(jié)器開環(huán)校驗都是在儀表實驗室進行,要對調(diào)節(jié)器輸人標準信號,輸出要接標準電流表,然后檢查PID調(diào)節(jié)器的控制點、比例度、積分時間、微分時間等性能,來判斷PID調(diào)節(jié)器是否合格。
2020-07-13 10:16:364006 
PID各參數(shù)對PID運算輸出的影響。進而分析各參數(shù)影響的曲線形狀。通過相關(guān)的曲線形狀,了解PID參數(shù)整定的方法。仔細分清各個參數(shù)的作用,和擾動情況下的相應(yīng)曲線,可以快速準確地判斷一個自動調(diào)節(jié)系統(tǒng)中,到底應(yīng)該設(shè)置什么樣的參數(shù)。
2021-04-07 15:29:127 調(diào)節(jié)電流,如下TL494偏差放大器作為電流偏差放大器功能,反相端引腳“15”兩端電壓,由分壓關(guān)系得到,電阻可以任選一個已知值,kohm級別可行。
2021-05-01 16:52:0014564 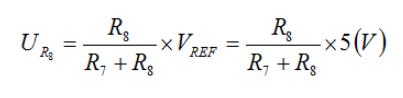
PID調(diào)節(jié)及PID調(diào)節(jié)的基本原理免費下載。
2021-04-25 15:41:4451 PID各參數(shù)對PID運算輸出的影響。進而分析各參數(shù)影響的曲線形狀。通過相關(guān)的曲線形狀,了解PID參數(shù)整定的方法。仔細分清各個參數(shù)的作用,和擾動情況下的相應(yīng)曲線,可以快速準確地判斷一個自動調(diào)節(jié)系統(tǒng)中,到底應(yīng)該設(shè)置什么樣的參數(shù)。
2021-04-27 10:38:1447 PID調(diào)節(jié)方法講解免費下載。
2021-05-25 16:01:1864 沒有一種控制算法比PID調(diào)節(jié)規(guī)律更有效、更方便的了。現(xiàn)在一些時髦點的調(diào)節(jié)器基本源自PID。甚至可以這樣說:PID調(diào)節(jié)器是其它控制調(diào)節(jié)算法的嗎。
2021-10-06 11:18:0021337 PID因穩(wěn)定性極好現(xiàn)被廣泛應(yīng)用于工業(yè)過程控制領(lǐng)域。PID能改善系統(tǒng)在調(diào)節(jié)過程中的動態(tài)特性以及可以避免被控量的嚴重超調(diào),具有抑制誤差的作用,在一定的控制度下通過公式計算得到PID控制器的參數(shù),在實際運行中進行最后調(diào)整與完善。
2021-10-11 10:19:4119924 百度網(wǎng)盤下載地址(970):點擊下載PID電機控制系統(tǒng)設(shè)計:TPWM:電機控制PWM;AS:電機的實際速度;P:為PI參數(shù)調(diào)節(jié);S:設(shè)定的電機速度;+:電機正轉(zhuǎn) -:電機反轉(zhuǎn).四個按鍵,控制P參數(shù)
2021-11-23 17:21:2012 調(diào)節(jié)系統(tǒng)投自動:往往在控制方案確定好且判斷出調(diào)節(jié)器的正/反作用后,最關(guān)鍵的是P、I、D參數(shù)如何整定,根據(jù)多年的現(xiàn)場工作經(jīng)驗,談?wù)勅绾握?b class="flag-6" style="color: red">定調(diào)節(jié)系統(tǒng)的P、I、D參數(shù),請大家在工程中參考。
2022-12-07 21:37:3811827 PID調(diào)節(jié)器是一種常見的控制系統(tǒng),它可以通過對輸入信號進行處理,控制輸出信號來維持目標參數(shù)的穩(wěn)定性。PID調(diào)節(jié)器的三個重要參數(shù)如下:
比例系數(shù)(P):比例系數(shù)是PID調(diào)節(jié)器中最基本的參數(shù)
2023-03-25 11:37:2725320 PID調(diào)節(jié)器的使用操作一般包括以下幾個步驟:
設(shè)置目標值:確定需要控制的目標值,例如溫度、壓力、流量等。
連接控制器:將PID控制器連接到被控對象上,例如溫度傳感器、壓力傳感器
2023-03-25 11:41:2221487 PID調(diào)節(jié)系統(tǒng)PID功能由PID調(diào)節(jié)器或DCS系統(tǒng)內(nèi)部功能程序模塊實現(xiàn),了解與PID調(diào)節(jié)相關(guān)的一些基本概念,有助于PID入門新手快速熟悉調(diào)節(jié)器應(yīng)用,在自動調(diào)節(jié)系統(tǒng)中成功整定PID參數(shù)。 本文介紹必須
2023-09-25 19:40:013587 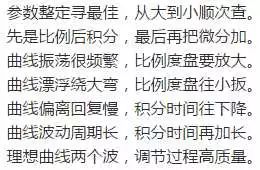
PID調(diào)節(jié)是一種廣泛用于工業(yè)控制系統(tǒng)中的反饋回路控制方法。通過調(diào)整比例(P)、積分(I)和微分(D)三個參數(shù),可以有效地控制系統(tǒng)誤差,提高系統(tǒng)的穩(wěn)定性和響應(yīng)速度。下面將詳細介紹PID調(diào)節(jié)參數(shù)
2023-11-24 14:14:5556051 在工業(yè)自動化和過程控制領(lǐng)域,PID(比例-積分-微分)調(diào)節(jié)器是一種廣泛應(yīng)用的控制策略。其通過精確計算和調(diào)整系統(tǒng)的輸入信號,以實現(xiàn)系統(tǒng)輸出對設(shè)定值的穩(wěn)定跟隨。本文將詳細探討PID調(diào)節(jié)器的作用、工作原理、參數(shù)調(diào)整、應(yīng)用場景以及在現(xiàn)代控制系統(tǒng)中的重要性,旨在為讀者提供對PID調(diào)節(jié)器深入而全面的理解。
2024-06-05 15:53:567370 ,PID(比例-積分-微分)控制器是常用的控制算法。本文將介紹串級控制PID參數(shù)的調(diào)節(jié)方法。 1. 串級控制的基本原理 串級控制由兩個控制器組成:主控制器和副控制器。主控制器負責(zé)設(shè)定整個系統(tǒng)的輸出,而副控制器則負責(zé)調(diào)節(jié)主控制器的設(shè)定值,以實現(xiàn)對
2024-08-23 09:13:106411 控制算法結(jié)構(gòu)簡單,易于理解和實現(xiàn),不需要復(fù)雜的數(shù)學(xué)模型。 適應(yīng)性強 :PID控制器能夠適應(yīng)多種類型的系統(tǒng),具有較好的魯棒性。 調(diào)節(jié)方便 :通過調(diào)整比例、積分、微分三個參數(shù),可以靈活地調(diào)整控制效果。 廣泛應(yīng)用 :PID控制適用于各種工業(yè)過程,如
2024-11-06 10:33:106682 PID調(diào)節(jié)器是一種廣泛應(yīng)用于工業(yè)控制系統(tǒng)中的控制器,它根據(jù)給定的參考值(設(shè)定值)和實際測量值(過程變量)之間的偏差來調(diào)整控制信號,以達到控制目標。PID調(diào)節(jié)器的名稱來源于其三個基本控制動作:比例
2024-11-06 10:38:392701 控制器通過計算誤差信號(期望值與實際值之差)的比例、積分和微分來調(diào)整控制量,以減少誤差并實現(xiàn)系統(tǒng)的穩(wěn)定。比例項(P)對當前誤差進行響應(yīng),積分項(I)對過去累積的誤差進行響應(yīng),而微分項(D)則預(yù)測未來誤差的變化。 調(diào)節(jié)PID參數(shù)的基本步驟
2024-11-13 14:31:3313840 ,因此電流環(huán)的調(diào)節(jié)對變頻器的性能有直接影響。 1. 確定電流環(huán)的PID參數(shù): ? ?● 電流環(huán)的PID參數(shù)(比例、積分、微分)通常在變頻器內(nèi)部已經(jīng)設(shè)定好,但在特定應(yīng)用場合下可能需要進行微調(diào)。 ? ?● 比例增益(P)用于減小殘差并增
2025-06-07 16:16:571615 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論