 電子發燒友App
電子發燒友App



ROS(Robot OperatingSystem)是開源的機器人系統平臺。使用這個之后,機器人就可以看見東西、測繪、導航,或是以最新的算法作用于周圍的環境當中。假如想要制造復雜的機器人,已經準備好的ROS程序代碼就能派上用場。ROS能在最低限度下運用。這可以透過Raspberry Pi等級的計算機安裝。
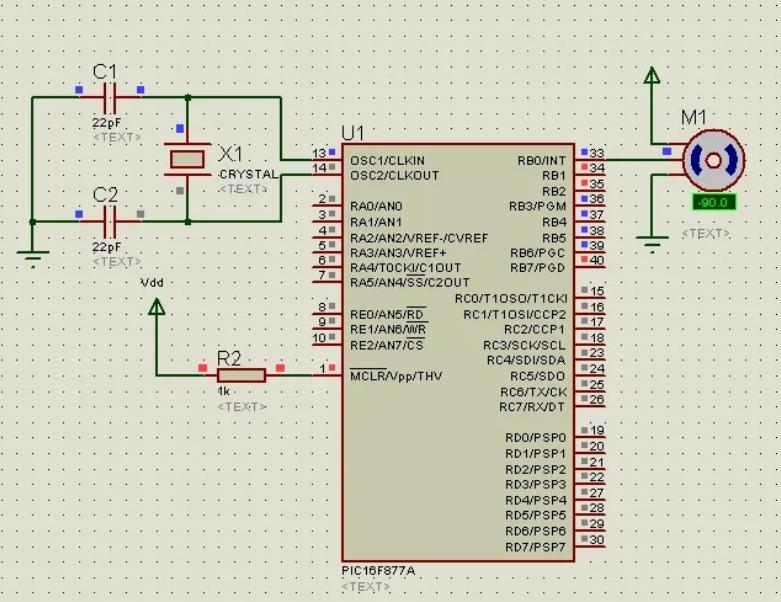
做為ROS的入門篇我們來看看如何控制伺服機。伺服機的缺點是會盡快遵照指令運轉,因此頭部常常會突然活動,以至于失去平衡。不過使用ROS之后,就可以進行正弦曲線運動,讓機器人保持穩定。由于可以在ROS當中進行這項操作,因此無須改寫控制用的程序代碼。另外,連接伺服機和ROS的程序代碼,以及伺服機的硬件都無須變更。再者,程序代碼還可以任意使用。
ROS很適合用在Ubuntu或Debian上,無須編譯。建置時要在Linux機器上執行Ubuntu,使用業余用伺服機、Arduino和普通的導線。ROS要在Ubuntu機器上啟動,訊息則透過USB傳送到Arduino。只要安裝二進制的ROS套件,就會在主控臺程序(像是gnome-terminal或konsole)追加以下指令,這樣Arduino系統就能辨識ROS函式庫。
cd~/sketchbook/libraries
rm-rf ros_lib
rosrunrosserial_arduino make_l ibraries.py 。
Arduino的程序
接下來要將程序代碼上傳到Arduino當中,執行低階的伺服機控制,以便能從Linux機器操作。這時要以限制范圍內的百分比(0.0~1.0)指定伺服機的位置。之所以使用百分比而不是寫明角度,是因為Arduino的程序代碼限制了正確的角度,要避免在指定角度時發生沖突。
就如各位所見,使用ROS之后,一般的循環函數就會變得相當簡單。循環函數只會訂閱(subscribe)數據,任何Arduino循環都一樣。設定時要將ROS初始化,將各個ROS訊息訂閱者的訂閱叫出來。每個訂閱者會占據Arduino的RAM,數量取決于要用程序代碼做什么,以6個到12個為限。
#include
#include
#include
#include
#define SERVOPIN 3
Servo servo;
void servo_cb( const std_msgs::Float32& msg )
{
const float min = 45;
const float range = 90;
float v = msg.data;
if( v 》 1 ) v = 1;
if( v 《 0 ) v = 0;
float angle = min + (range * v);
servo.write(angle);
}
ros::Subscriber
ros::NodeHandle nh;
void setup()
{
servo.attach(SERVOPIN);
nh.initNode();
nh.subscribe(sub);
}
void loop()
{
nh.spinOnce();
delay(1); }
接下來要設法透過Arduino在ROS的世界說話。最簡單的方法是使用機器人啟動檔。雖然以下的檔案內容非常簡單,但是這里要追加啟動檔,如此一來即使是非常復雜的機器人,也能用一個指令啟動。
$ cat rosservo.launch
$ roslaunch 。/rosservo.lanch
rostopic指令可以看出ROS訊息傳送到機器人的哪個部位。看了下面的程序代碼就會發現,「/head/tilt」可以透過Arduino使用。訊息要使用「rostopic」傳送。-1的選項只會發布(publish)訊息一次,通知/head/tilt傳送一個浮點數。
$ rostopic list
/diagnostics
/head/tilt
/rosout
/rosout_agg
$ rostopic pub -1 /head/tiltstd_msgs/Float32 0.4
$ rostopic pub -1 /head/tilt std_msgs/Float320.9
這個階段當中,能夠將所有發布數值到ROS的已知方法用在控制伺服機上。假如從0改成1,伺服機就會全速運行。這本來并沒有問題,但實際上我們想要逐漸加速以達到全速,然后再逐漸減速,停在目標角度上。假如伺服機驟然運轉,機器人的動作就會變得僵硬,讓周圍的人嚇一跳。
用另一個節點平滑運動
?
Houndbot
?
Terry
Terry和Houndbot都是ROS機器人,以6061個鋁合金零件制造而成。項目的目標是要盡量讓這些機器人自主運動。
以下的Python腳本程序會監聽「/head/tilt/smooth」的訊息,朝「/head/tilt」發布許多訊息,好讓伺服機轉到目標角度之前慢慢加速,再慢慢延遲旋轉。當訊息抵達「/head/tilt/smooth」時一定會呼叫「moveServo_cb」。這個回調函式會從-90到+90度之間每10度產生1個數值,追加到角度數組當中。「sin()」會取這個角度,數值從-1到+1慢慢增加。該數值加1之后,范圍就會變成0到+2,再除以2之后, 0到+1的曲線數值數組就完成了。然后再看看m數組當中,每當發布訊息時,就會稍微前進一點,范圍在r之內,直到1*r或是全范圍為止。
#!/usr/bin/env python
from time import sleep
import numpy as np
import rospy
from std_msgs.msg import Float32
currentPosition = 0.5
pub = None
def moveServo_cb(data):
global currentPosition, pub
targetPosition = data.data
r = targetPosition - currentPosition
angles = np.array( (range(190)) [0::10]) -90
m = ( np.sin( angles * np.pi/ 180. ) + 1 )/2
for mi in np.nditer(m):
pos = currentPosition + mi*r
print “pos: “, pos
pub.publish(pos)
sleep(0.05)
currentPosition = targetPosition
print “pos-e: “, currentPosition
pub.publish(currentPosition)
def listener():
global pub
rospy.init_node(‘servoencoder’,anonymous=True)
rospy.Subscriber(‘/head/tilt/smooth’,Float32, moveServo_cb)
pub = rospy.Publisher(‘/head/tilt’,Float32, queue_size=10)
rospy.spin()
if __name__ == ‘__main__’:
listener()
想要測試伺服機順暢的動作,就要啟動Python腳本,將訊息發布到「/head/tilt/smooth」,這樣一來即可檢視順暢的動作。
$ 。/servoencoder.py
$ rostopic pub -1 /head/tilt/smoothstd_msgs/Float32 1
$ rostopic pub -1 /head/tilt/smoothstd_msgs/Float32 0
ROS當中的名稱也可以重新測繪。只要將「/head/tilt/smooth」重新測繪為「/head/tilt」,程序就能向伺服機發出命令,而不會意識到正弦曲線的數值在變化。
迎向未來
雖然這里只說明了簡單的伺服機控制,ROS卻有更多功能。假如想要知道妨礙機器人的東西是什么,不妨使用已經支持ROS的Kinect。就算導航堆棧使用這項數據測繪,也可以饋送簡短的Python腳本,讓伺服機動起來,命令機器人追蹤附近的物體。沒錯,眼睛真的會追逐物體。
Terry是室內用機器人,搭載2個Kinect。一個專門用來導航,另一個則用于深度測繪。Terry使用6個Arduinos,能夠從用了ROS的網絡接口或PS3遙控器直接操作。
Houndbot是設計成要在戶外使用。里頭有遙控器、GPS、羅盤和ROS耳形控制器。后續計劃要搭載導航用的PS4雙鏡頭攝影機,因為Kinect不能在陽光下使用。這臺機器人重量為20公斤。還可以追加了懸吊系統,為此需要自行制造鋁合金客制化零件。
















 工商網監
工商網監
評論