 實現ARM+ROS(機器人操作系統)之運行ROS!
實現ARM+ROS(機器人操作系統)之運行ROS!

如何低成本搭建ARM+ROS的硬件載體?上文展示ROS部署前的籌備工作及步驟分解,本文將為大家演示ROS的移植及測試方法。
1. 準備工作
經過前面的環境搭建,HDG2L-IoT評估套件已經能穩定地運行Ubuntu+docker環境,當前需要下載運行ROS鏡像即可。
本文參考ROS官方文檔《Getting started with ROS and Docker》,結合我司的HDG2L-IoT評估套件實現ROS方案完全搭建流程,參考網址如下所示。

2. 選擇ROS鏡像
目前docker官網提供了搭建好的ROS鏡像(支持arm64架構),網址為:

如下所示。
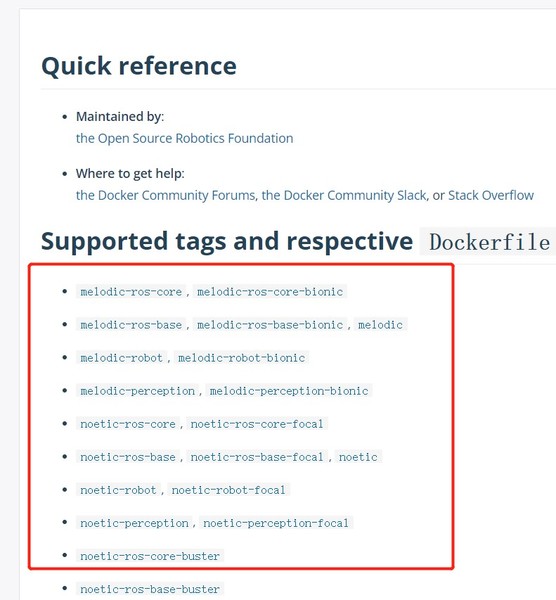
下載命令如下所示,填入上圖的字符串。

3. 下載ROS鏡像
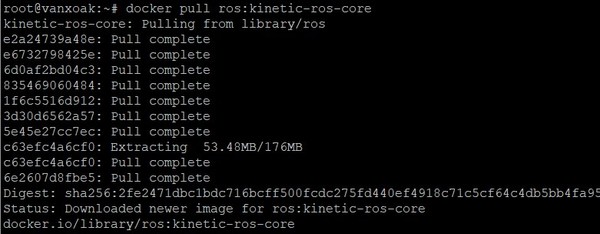
根據項目需求選擇合適的ROS鏡像,本例以kinetic-ros-core為例,下載命令如下所示。

下載完成如下圖所示:
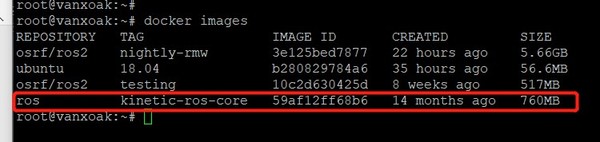
查看鏡像的命令:

4. 運行ROS容器
使用下載下來的ROS鏡像來啟動容器,命令如下所示。

以終端模式進入ROS容器。
5. 啟動ROS應用
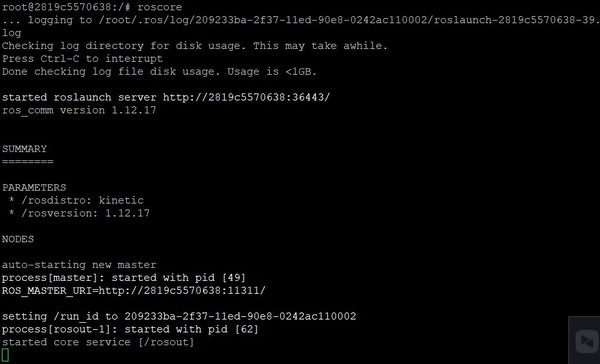
進入后運行roscore來啟動運行ros節點必要的ROS Master和ROS parameter,運行情況如下所示。
至此,我們通過三篇文章從硬件與底層、環境搭建、ROS運行等方面為大家介紹了一個全新的ARM+ROS的軟硬件實現方案。文章中若有不明之處或需要技術問題交流請隨時聯系萬象奧科官方。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
ARM開發
+關注
關注
0文章
37瀏覽量
10075
發布評論請先 登錄
相關推薦
熱點推薦
機器人主控核心板米爾RK3576 + ROS2,NPU加速實現目標跟隨與機械臂抓取
回顧上篇:基于RK3576+ROS2 Humble+SLAM Toolbox+Nav2,我們實現了機器人的建圖與自主導航。機器人已經能夠“走到哪里”。但真正的智能
發表于 04-10 21:23
開發必看,RK3576基于Ubuntu22.04安裝 測試ROS2機器人系統
(RobotOperatingSystem)和ROS2并非傳統意義上的操作系統內核,而是面向機器人開發的開源軟件框架,提供節點通信、硬件抽象、算法庫、仿真調試等核心能力,降低

ROS2 SLAM建圖與導航實戰--基于米爾RK3576開發板
需要安裝Gazebo仿真環境以及經典的TurtleBot3機器人模型,盡量在x86 虛擬機安裝仿真,arm64架構turtlebot3支持不足。
# 安裝Gazebo與ROS2接口包
sudo apt
發表于 03-12 17:55
RK平臺ROS2適配全指南:從編譯到運行,手把手搞定嵌入式機器人開發
Operating System 2)作為新一代機器人操作系統,在分布式通信、實時性、多語言支持上的升級,更是嵌入式機器人開發的核心框架。

米爾RK3576成功上車!ROS2 Humble生態系統體驗
%@700MHz
渲染體驗:操作流暢,視角切換無卡頓
四、總結與展望RK3576平臺完全具備運行完整ROS2生態的能力,性能滿足:
機器人算法開發與調試
三維可視化與仿真
發表于 01-15 18:30
EtherCAT主站協議棧EC-Master在ROS(機器人操作系統)中的應用
EtherCAT主站協議棧EC-Master在ROS(機器人操作系統)中的應用

探索RISC-V在機器人領域的潛力
運行ROS 2,充分證明了RISC-V架構完全有能力承載機器人操作系統這樣的復雜軟件棧。它不僅是學習RISC-V的絕佳工具,更是探索未來邊緣計算和智能
發表于 12-03 14:40
NVIDIA助力新一代機器人開發開源框架
今年的 ROSCon 在新加坡舉辦,并于 10 月 29 日順利閉幕。大會吸引了全球機器人操作系統(ROS)領域開發者的關注。ROS 是目前全球應用最廣泛的
ROS 傳感器模塊的通用架構設計與跨中間件擴展實踐
3DGS與4DGS的核心應用實踐與技術突破!在自動駕駛與機器人仿真領域,傳感器數據的高效交互是連接虛擬仿真與實際系統的關鍵紐帶。ROS(RobotOperatingSystem)作為行業通用的

如何基于翼輝信息SylixOS開發ROS 2應用
ROS 2(Robot Operating System 2)是機器人操作系統(ROS)的升級版,是一套開源的專為機器人開發而設計的軟件庫與

硬核上車!RK3576基于Ubuntu部署ROS機器人系統詳細攻略(上)
本文適用于瑞芯微RK3562、RK3566、RK3568、RK3576、RK3588等Arm64位SoC,適配開發ROS2系統。各型號觸覺智能均有配套核心板及開發板,實現了百分百全國產

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
2的cv_bridge庫,可以輕松實現ROS圖像消息與OpenCV格式的轉換,這在實際開發中極為便利。
視覺巡線與二維碼識別的應用
視覺巡線是機器人自主導航的經典案例,書中從仿真到真實機器
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
的知識,還需要對ROS 2的節點通信和數據處理有一定的了解。通過實踐這一部分內容,我掌握了如何在ROS 2中實現二維碼識別,這對于提高機器人的智能性和交互性具有重要意義。
地圖構建:S
發表于 04-27 11:42
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
規劃:導航是機器人自主運行的關鍵功能。書中詳細介紹了基于 ROS 2 的導航系統,包括地圖創建、路徑規劃和導航控制等環節。首先,通過激光雷達等傳感器獲取環境信息,使用 SLAM(Sim
發表于 04-27 11:24



 工商網監
工商網監
評論