可靠的測(cè)量位置、轉(zhuǎn)速傳感器,廣泛應(yīng)用于工業(yè)驅(qū)動(dòng)和新能源汽車。通過(guò)閱讀本文,您可以了解到:什么是旋變,它是如何工作的,旋變的相關(guān)應(yīng)用和目前市場(chǎng)上存在哪些方案。 圖1 電機(jī)驅(qū)動(dòng)系統(tǒng)的基本框圖 1. 什么是旋轉(zhuǎn)變壓器? 旋轉(zhuǎn)
2018-03-09 09:12:58 15572
15572 
針對(duì)三相全波六狀態(tài)工作無(wú)刷直流電機(jī)霍爾位置及特定換相邏輯下的電機(jī)旋向問(wèn)題,提出一種通過(guò)右手螺旋定則確定每相繞組磁勢(shì)方向進(jìn)而確定電機(jī)霍爾位置,隨后通過(guò)左手定則及牛頓第三運(yùn)動(dòng)定律對(duì)電機(jī)旋向進(jìn)行判斷的簡(jiǎn)易方法;并通過(guò)兩款電機(jī)實(shí)際工程驗(yàn)證,確定該方法的正確性及普遍適用性。
2022-11-17 14:12:5014329 旋變變壓器又稱旋變傳感器,豐田車上也稱解析器、轉(zhuǎn)角傳感器。是一種位置傳感器,可精確檢測(cè)轉(zhuǎn)子的位置,方向、速度,用來(lái)對(duì)驅(qū)動(dòng)電機(jī)或發(fā)電機(jī)(回收能量)進(jìn)行方向、轉(zhuǎn)速的控制。
2022-12-02 09:36:311785 工業(yè)現(xiàn)場(chǎng)中有大量的步進(jìn)電機(jī)應(yīng)用,比如自動(dòng)化控制,機(jī)器人關(guān)節(jié),打印機(jī)控制等等。其中應(yīng)用最廣泛的是混合式步進(jìn)電機(jī),也是我們?nèi)粘=佑|到的絕大部分步進(jìn)電機(jī)的形式。在概念上,步進(jìn)電機(jī)和變磁阻電機(jī)也存在一定的聯(lián)系和差別,本文就初步淺談一下磁阻電機(jī)/步進(jìn)電機(jī)的結(jié)構(gòu)和工作原理,并且比較一下不同電機(jī)之間的差別。
2023-01-17 11:31:492219 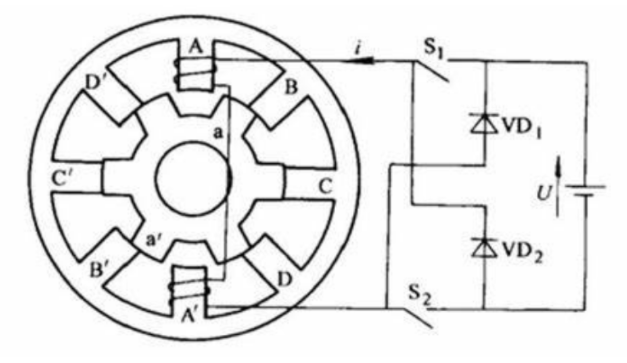
旋轉(zhuǎn)變壓器(旋變),是電機(jī)控制中常用的一種位置傳感器,用來(lái)反應(yīng)電機(jī)的轉(zhuǎn)子位置,提供給軟件做電機(jī)控制等相關(guān)算法。
2023-04-11 12:48:4124281 電機(jī)位置傳感器零位偏角(即旋變零位偏角或初始角)對(duì)電機(jī)輸出扭矩的精度至關(guān)重要。
2023-07-10 14:49:0115699 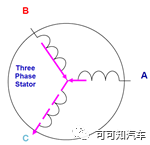
在選型1FK7伺服電機(jī)時(shí),對(duì)旋變編碼器,看得模糊SIZER區(qū)分有多極旋變、單極旋變、14位旋變、15位旋變,在一般常識(shí)中,知道有多極、單極之分,但14/15位是是否也是單極或多極的分支?即不分單極或多極,最終分辨率就是14位、15位?
性價(jià)比上,這些旋變,哪款高些?
2023-11-16 06:14:31
最近在用AD2S1210來(lái)測(cè)試旋變的時(shí)候遇到一個(gè)問(wèn)題:示波器探針夾cos,示波器黑夾子夾coslo,在一段時(shí)間內(nèi)會(huì)出現(xiàn)一個(gè)畸形波,同時(shí)測(cè)到EXC引腳也有畸形波輸出,如圖片和附件所示,但晶振方面
2016-07-21 21:35:31
各位大神,旋變解碼電路請(qǐng)教一下,我用的是AD1200,調(diào)試的時(shí)候發(fā)現(xiàn)不同批次的AD1200,通電后會(huì)出現(xiàn)DOS燈亮,最終旋變報(bào)警
2020-02-22 11:26:10
如果旋變輸出的波形不接AD2S1200,輸出的正旋差分信號(hào)是完全符合AD2S1200的輸入的,直接接示波器波形如下圖1:
圖1 旋變輸出的信號(hào)直接接示波器
圖2 旋變輸出的sin
2023-12-21 06:48:46
電機(jī)控制之旋變及位置反饋解決方案篇其它話題的熱門問(wèn)答請(qǐng)前往總貼查看。http://www.deyisupport.com/question_answer/microcontrollers/c2000
2020-05-20 09:33:31
在測(cè)試并行輸出時(shí),我以上圖紅線所示的時(shí)序,想連續(xù)的讀出旋變的位置數(shù)據(jù),為什么每次讀出的只是一個(gè)值,不隨旋變轉(zhuǎn)子的變化而變化,只有將RD拉高再拉低時(shí)才會(huì)輸出下一個(gè)位置數(shù)據(jù)?
2023-12-22 06:17:29
使用AD2S1205解碼芯片與28335通訊,角度寄存器數(shù)據(jù)讀取正常,速度寄存器高12位一直在全0和全1之間跳變。
如圖為電機(jī)靜止?fàn)顟B(tài),前半個(gè)波形角度信息正確,后半部分速度波形在全1全0跳變。
2024-11-14 17:13:11
控制器正在調(diào)試,急急急!!!使用AD2S1205旋變芯片,控制器調(diào)試過(guò)程中電機(jī)正常運(yùn)行中,突然報(bào)DOS故障并且此故障鎖存至低電平,經(jīng)查看DATASHEET,為正余弦失配,但是電機(jī)還能正常運(yùn)轉(zhuǎn)。問(wèn)題1
2018-08-09 06:15:36
急急急!!!使用AD2S1205旋變芯片,控制器調(diào)試過(guò)程中電機(jī)正常運(yùn)行中,突然報(bào)DOS故障并且此故障鎖存至低電平,經(jīng)查看DATASHEET,為正余弦失配,但是電機(jī)還能正常運(yùn)轉(zhuǎn),請(qǐng)問(wèn)如何消除此故障?如果不消除會(huì)影響正常運(yùn)行嗎?正余弦電路如下謝謝大家,提供寶貴建議或意見。
2019-02-13 14:20:44
,第一張圖是SIN和地之間的電壓信號(hào)第二張是旋變輸出來(lái)的SIN與SINLO的電壓信號(hào)第三張是旋變濾波后的電壓信號(hào)這里我給電機(jī)沒有通電,只將電機(jī)上的旋變和AD2S1205進(jìn)行了連接@
2019-01-25 08:34:14
只給AD2S1205那個(gè)板子上電,得到的旋變的激勵(lì)信號(hào)是正確的(此時(shí)沒有與旋變連接),此后與旋變連接上電,得到的激勵(lì)信號(hào)就是很大的錯(cuò)誤,也沒有旋變輸出的信號(hào)SIN/SINLO/COS/COSLO,在
2023-12-08 08:25:05
使用AD2S1205采集多摩川旋變TS2640N321E64的位置數(shù)據(jù)時(shí),范圍為0-4096,勻速旋轉(zhuǎn)旋變,0-1023位置信息均勻,然后會(huì)突然從1023跳變到3071,此時(shí)旋變只是旋轉(zhuǎn)了很小的一個(gè)角度,再繼續(xù)旋轉(zhuǎn)旋變,位置從3072到4096均勻變化,請(qǐng)問(wèn)為什么會(huì)出現(xiàn)這樣的問(wèn)題呢?
2020-11-27 11:27:50
您好,在與旋變匹配時(shí),LOS、DOS未出現(xiàn)故障,但是LOT周期性出現(xiàn)故障信號(hào)?請(qǐng)問(wèn)LOT故障具體由什么原因產(chǎn)生?有什么解決方案?
2023-12-15 07:13:29
AD2S1205旋變芯片,單板測(cè)試,未接入旋變時(shí),AD2S1205的增量式編碼器輸出A/B就有信號(hào)了,而且方波頻率在幾K到十幾K之間,這是什么原因造成的?
2023-12-12 06:22:53
AD2S1205旋變芯片,單板測(cè)試,未接入旋變時(shí),AD2S1205的增量式編碼器輸出A/B就有信號(hào)了,而且方波頻率在幾K到十幾K之間,這是什么原因造成的?
2018-08-07 08:44:22
使用AD2S1210解碼旋變測(cè)電機(jī)的角度和位置。使用過(guò)程中發(fā)現(xiàn)當(dāng)電機(jī)的驅(qū)動(dòng)電壓增大,但是轉(zhuǎn)速較低時(shí),讀得的旋變角度信號(hào)會(huì)不定時(shí)的出現(xiàn)錯(cuò)誤,導(dǎo)致電機(jī)控制震蕩。但是如果是同樣的驅(qū)動(dòng)電壓,電機(jī)轉(zhuǎn)速較高
2018-11-14 09:19:05
您好,AD2S1210這款芯片已經(jīng)調(diào)了快兩個(gè)月了,目前的情況是,我們只需要測(cè)旋變的角度,不測(cè)轉(zhuǎn)速,單片1210使用模擬開關(guān)切換來(lái)帶5個(gè)旋變傳感器,循環(huán)讀取每個(gè)傳感器的角度,整個(gè)電路參考CN0276
2024-12-19 06:00:07
我購(gòu)買了一塊AD2S1210的評(píng)估板和轉(zhuǎn)接板,用來(lái)解碼多摩川的旋變。如下圖所示,旋變還沒有裝到電機(jī)上,但是足夠讀取原副邊線圈的正余弦波形。
現(xiàn)在通過(guò)上位機(jī)設(shè)置,激勵(lì)正弦信號(hào)是10kHz
2023-12-04 06:41:31
看一下,波形是好的。
問(wèn)題1:可以看到旋變的位置跳變是有一定規(guī)律的,但又不是電機(jī)的一圈,已經(jīng)轉(zhuǎn)了多圈,雖然我懷疑是旋變安裝問(wèn)題,但是示波器沒有抓到對(duì)應(yīng)波形,還有沒有其他方法能確定是旋變
2023-12-07 07:17:27
我最近一個(gè)項(xiàng)目上用到AD2S1210去解碼旋變信號(hào),但發(fā)現(xiàn)上電沒有激磁信號(hào)(沒有工作),沒有晶振信號(hào)。但是,一上電就有40mA(5V),而且 MCU的SDO,SDI,CLK, CS, SAMPLE
2019-01-22 09:03:27
用評(píng)估板EVAL-AD2S1210EDZ 采集旋變信息,旋變型號(hào)為多摩川TS2640N320E64,評(píng)估板連接自己做的DSP板,然后DSP與PC機(jī)通過(guò)串口連接,DSP通過(guò)并口訪問(wèn)控制AD2S1210
2018-10-12 09:12:51
or /exc信號(hào)為:
R1/R2信號(hào)為:
處理后的 sin/sinlO信號(hào)為:
信號(hào)值滿足閾值要求,但是仍發(fā)生信號(hào)降級(jí)。
問(wèn)題:1,請(qǐng)問(wèn)信號(hào)降級(jí)的情況下,旋變解碼芯片能否正常工作?2.如果不能正常工作,請(qǐng)問(wèn)該如何改正呢?
還望各位前輩不吝賜教。
非常感謝!~
2023-12-04 07:27:19
于汽車和工業(yè)應(yīng)用中,用來(lái)提供電機(jī)軸位置和速度的反饋信息。AD2S1210是一款完整的10位至16位分辨率RDC,片內(nèi)集成了可編程正旋波振蕩器,為旋變器提供激勵(lì)信號(hào)。由于工作環(huán)境惡劣,AD2S1210
2021-05-21 21:46:25
大家下午好!今天給大家?guī)?lái)【旋變驅(qū)動(dòng)電路OCL電路避免交越失真設(shè)計(jì)】講解視頻,我們會(huì)持續(xù)更新,有問(wèn)題可以留言一同交流討論。上期回顧:如何避免OCL電路交越失真設(shè)計(jì)
2021-12-13 18:02:03
最近做項(xiàng)目發(fā)現(xiàn)一個(gè)問(wèn)題,旋變解碼電路按照adi官方提供的參考電路也一直正常使用無(wú)問(wèn)題,最近客戶拿過(guò)來(lái)一個(gè)電機(jī)讓匹配接上后發(fā)現(xiàn)經(jīng)常報(bào)位置跟蹤丟失的故障,檢查后發(fā)現(xiàn)反饋的信號(hào)濾波器后比濾波器前滯后了幾度
2023-12-12 06:38:58
可靠的測(cè)量位置、轉(zhuǎn)速傳感器,廣泛應(yīng)用于工業(yè)驅(qū)動(dòng)和新能源汽車。通過(guò)閱讀本文,您可以了解到:什么是旋變,它是如何工作的,旋變的相關(guān)應(yīng)用和目前市場(chǎng)上存在哪些方案。[/url]圖1 電機(jī)驅(qū)動(dòng)系統(tǒng)的基本框圖1.
2017-08-22 10:16:59
我使用AD2S1205進(jìn)行旋轉(zhuǎn)變壓器的數(shù)據(jù)處理,旋變安裝在電機(jī)上
使用的是并行傳輸和模擬的編碼器輸出。
做測(cè)試時(shí)發(fā)現(xiàn)模擬編碼器輸出的信號(hào)有干擾,可能是外界干擾,如圖1所示
圖1
圖中兩路
2023-12-22 07:51:30
使用AD2S1210解碼旋變測(cè)電機(jī)的角度和位置。使用過(guò)程中發(fā)現(xiàn)當(dāng)電機(jī)的驅(qū)動(dòng)電壓增大,但是轉(zhuǎn)速較低時(shí),讀得的旋變角度信號(hào)會(huì)不定時(shí)的出現(xiàn)錯(cuò)誤,導(dǎo)致電機(jī)控制震蕩。但是如果是同樣的驅(qū)動(dòng)電壓,電機(jī)轉(zhuǎn)速較高
2023-11-27 06:13:00
飛行器姿態(tài), 又具 有較強(qiáng)抗干擾和環(huán)境 自適應(yīng)能力的姿態(tài)控制器是微小型四旋翼飛行器飛行控制系統(tǒng)研究的當(dāng)務(wù)之急。 五.四旋翼飛行器的結(jié)構(gòu)形式和工作原理:1.結(jié)構(gòu)形式直升機(jī)在巧妙使用總距控制和周期變距控制
2013-11-28 09:29:12
旋翼作為飛行的直接動(dòng)力源,旋翼對(duì)稱分布在機(jī)體的前后、左右四個(gè)方向,四個(gè)旋翼處于同一高度平面,且四個(gè)旋翼的結(jié)構(gòu)和半徑都相同,旋翼1 和旋翼3 逆時(shí)針旋轉(zhuǎn),旋翼2 和旋翼4 順時(shí)針旋轉(zhuǎn),四個(gè)電機(jī)對(duì)稱的安裝
2019-02-18 15:02:22
,支架中間空間安放飛行控制計(jì)算機(jī)和外部設(shè)備。結(jié)構(gòu)形式如圖 1.1所示。2.工作原理 四旋翼飛行器通過(guò)調(diào)節(jié)四個(gè)電機(jī)轉(zhuǎn)速來(lái)改變旋翼轉(zhuǎn)速,實(shí)現(xiàn)升力的變化,從而控制飛行器的姿態(tài)和位置。四旋翼飛行器是一種六
2016-12-23 23:20:13
ad2s1210 傳真: ad2s1210對(duì)于旋變輸出信號(hào)SIN、原 原 原 意、COS、COslo 上球有如下要求:
相對(duì)于agnd 向量的SIN、原意、COS和COslo 上球電壓必須始終在
2023-12-04 07:51:37
簡(jiǎn)介旋變器和機(jī)電傳感器可用來(lái)精確測(cè)量角位置,以可變耦合變壓器的方式工作,其初級(jí)繞組和兩個(gè)次級(jí)繞組之間的磁耦合量根據(jù)旋轉(zhuǎn)部件(轉(zhuǎn)子)位置而改變;轉(zhuǎn)子通常安裝在電機(jī)軸上。旋變器可部署在工業(yè)電機(jī)控制
2019-10-28 08:00:00
?、整形器、積分器、輔助濾波器?和極限比較檢查單元這些豐富的功能環(huán)節(jié)組合。在目前的伺服控制器應(yīng)用中,基本上都是采用外部專用的旋變解碼芯片獲得旋變位置信息。相對(duì)專用芯片,Delta-Sigma解調(diào)器模塊
2018-12-11 10:56:24
電機(jī)的旋變是四根線,沒有sinlo,coslo,那么我在輸入到AD2S1200的時(shí)候,sinlo,coslo應(yīng)該接地還是接什么?sin,cos的幅值是3.6V還是1.8V?
2018-10-09 15:48:54
電機(jī)的旋變是四根線,沒有sinlo,coslo,那么我在輸入到AD2S1200的時(shí)候,sinlo,coslo應(yīng)該接地還是接什么?sin,cos的幅值是3.6V還是1.8V?
2023-12-20 06:14:08
只給AD2S1205那個(gè)板子上電,得到的旋變的激勵(lì)信號(hào)是正確的(此時(shí)沒有與旋變連接),此后與旋變連接上電,得到的激勵(lì)信號(hào)就是很大的錯(cuò)誤,也沒有旋變輸出的信號(hào)SIN/SINLO/COS/COSLO,在
2018-07-31 06:14:43
[tr][td]有沒有把旋變集成到主芯片里的片子呢?它的外圍需要什么配置呢?[/td][/tr]
2018-12-13 17:13:04
目前旋變處理芯片,官方是推薦AD2S1210還是1205?選型需要,例如,如果都配置為12位,兩者的性能有差別么?
2018-10-26 09:23:04
旋變編碼器輸出激勵(lì)5Vrms10K正弦波,在逆變不開機(jī)信號(hào)質(zhì)量很好,逆變一開機(jī)信號(hào)質(zhì)量有毛刺,轉(zhuǎn)速越高毛刺越大,這種該如何解決?
2024-07-13 12:39:22
大功率自動(dòng)變流充電機(jī)的設(shè)計(jì):介紹了自動(dòng)變流充電機(jī)的工作原理、結(jié)構(gòu)組成及軟硬件的設(shè)計(jì)1 它緊密監(jiān)測(cè)充電過(guò)程中蓄電池電量逐漸充足的情況, 自動(dòng)根據(jù)機(jī)內(nèi)儲(chǔ)存的充電曲線逐步減
2009-10-26 11:06:16 52
52 旋片式真空泵工作原理
旋片式真空泵(簡(jiǎn)稱旋片泵)是一種油封式機(jī)械真空泵。其工作壓強(qiáng)范圍為101325~1.33×10-2(Pa)屬于低真空泵。它可以單獨(dú)使用
2009-10-25 14:32:324856 四旋翼無(wú)人機(jī)的電池、電機(jī)、螺旋槳選型與搭配
2015-11-10 16:43:560 了解匯川電機(jī)拆裝編碼器及旋變的方法,有助于你的維修能力。
2016-05-30 16:32:1123 論文闡述了CORDIC 算法的基本原理,在旋變解碼、坐標(biāo)變換、SVPWM、輸出限幅等算法中的應(yīng)用,并給出了實(shí)現(xiàn)方法及運(yùn)算值與實(shí)際值的對(duì)比,證明了CORDIC 算法具有運(yùn)算精度高,占用資源少,運(yùn)算速度快等特點(diǎn)。最后通過(guò)一臺(tái)額定9kW 的電動(dòng)車用永磁同步電機(jī)實(shí)驗(yàn)驗(yàn)證了算法的正確性和實(shí)用性。
2016-08-03 18:36:2525 本文首先介紹了勵(lì)磁的作用與分類,其次介紹了勵(lì)磁的技術(shù)指標(biāo)與發(fā)電機(jī)勵(lì)磁原理,最后介紹了發(fā)電機(jī)實(shí)現(xiàn)逆變的條件及發(fā)電機(jī)逆變勵(lì)磁的工作原理。
2018-05-09 12:44:4233562 
本文首先介紹了風(fēng)電機(jī)組變槳的工作原理,其次介紹了風(fēng)電機(jī)組變槳系統(tǒng)的形式,最后闡述了風(fēng)電機(jī)組變槳的檢查與維護(hù),具體的跟隨小編一起來(lái)了解一下。
2018-06-04 09:26:5936670 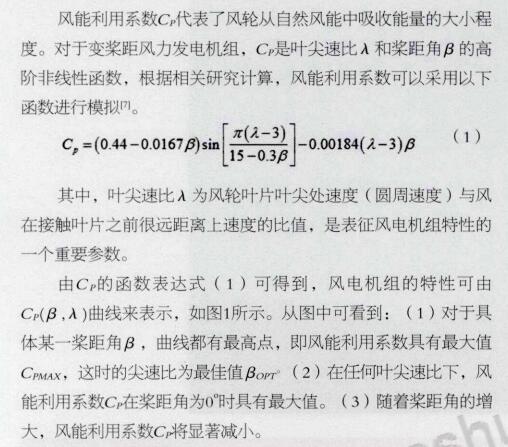
德州儀器PGA411旋變解決方案概覽
2019-05-06 06:16:006246 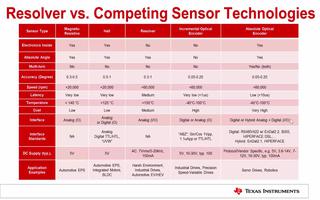
本文介紹了阻旋料位計(jì)的特點(diǎn)和工作原理。
2019-08-07 17:20:3911208 旋變器和機(jī)電傳感器可用來(lái)精確測(cè)量角位置,以可變耦合變壓器的方式工作,其初級(jí)繞組和兩個(gè)次級(jí)繞組之間的磁耦合量根據(jù)旋轉(zhuǎn)部件(轉(zhuǎn)子)位置而改變;轉(zhuǎn)子通常安裝在電機(jī)軸上。旋變器可部署在工業(yè)電機(jī)控制、伺服器
2020-08-26 15:46:312422 
旋變傳感器的作用是檢測(cè)轉(zhuǎn)子位置信號(hào),并把該信號(hào)轉(zhuǎn)化為電信號(hào)傳遞,給控制器進(jìn)行解碼獲得轉(zhuǎn)子轉(zhuǎn)速,旋變傳感器由于適應(yīng)性強(qiáng),可靠性好,在電機(jī)中應(yīng)用非常廣泛,特別是在新能源汽車?yán)锩嬗绕涠啵S著第三代半導(dǎo)體
2021-08-17 11:45:555383 可靠的測(cè)量位置、轉(zhuǎn)速傳感器,廣泛應(yīng)用于工業(yè)驅(qū)動(dòng)和新能源汽車。通過(guò)閱讀本文,您可以了解到:什么是旋變,它是如何工作的,旋變的相關(guān)應(yīng)用和目前市場(chǎng)上存在哪些方案。
?
圖1 電機(jī)驅(qū)動(dòng)系統(tǒng)的基本框圖
2021-12-24 15:05:359377 
旋涂是應(yīng)用最廣泛的將光刻膠和其他材料均勻分配到基板。旋涂用于生產(chǎn)所需材料的薄膜,具有高水平的過(guò)程控制和可重復(fù)性。
2022-07-25 16:36:135994 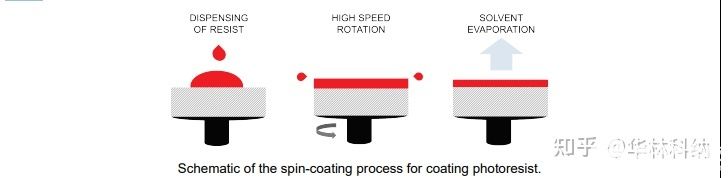
汽車旋變解碼應(yīng)用設(shè)計(jì)指導(dǎo)
2022-10-31 08:23:3011 TI旋變接口為工業(yè)驅(qū)動(dòng)和新能源汽車提供集成優(yōu)勢(shì)
2022-11-02 08:15:550 本報(bào)訊11月5日,常州市重大項(xiàng)目華旋高精密旋變傳感器項(xiàng)目開工儀式在常州經(jīng)開區(qū)舉行。常州經(jīng)開區(qū)黨工委副書記、管委會(huì)主任丁一宣布開工,黨工委副書記馮旭江出席并致辭。 華旋高精密旋變傳感器項(xiàng)目總投資3.1
2022-11-09 13:08:241232 旋變變壓器又稱旋變傳感器,豐田車上也稱解析器、轉(zhuǎn)角傳感器。是一種位置傳感器,可精確檢測(cè)轉(zhuǎn)子的位置,方向、速度,用來(lái)對(duì)驅(qū)動(dòng)電機(jī)或發(fā)電機(jī)(回收能量)進(jìn)行方向、轉(zhuǎn)速的控制。
2022-12-02 09:36:2119384 電源,是一款控制設(shè)備。 阻旋料位開關(guān)的工作原理為:使用交流電的微電機(jī)進(jìn)行減速,使得監(jiān)測(cè)葉片轉(zhuǎn)速也隨之下降,這時(shí)物料的物位會(huì)上升,并使葉片轉(zhuǎn)動(dòng)受阻。這時(shí)阻旋料位開關(guān)中的檢測(cè)裝置會(huì)以主軸為核心進(jìn)行旋轉(zhuǎn)位移,使得微動(dòng)開關(guān)發(fā)
2022-12-07 15:54:432654 旋變作為電機(jī)轉(zhuǎn)子位置反饋器件,與驅(qū)動(dòng)器之間通過(guò)3對(duì)差分信號(hào)線連接:
1) EXC+/-正弦激勵(lì)信號(hào); 2) SIN+/-正弦反饋信號(hào); 3) COS+/-余弦反饋信號(hào)
2023-02-15 10:45:56860 依據(jù)操作的方便程度,調(diào)整電機(jī)軸上的旋變轉(zhuǎn)子與電機(jī)軸的相對(duì)位置,或者旋變定子與電機(jī)外殼的相對(duì)位置;
2023-03-10 15:40:231690 如測(cè)量旋變阻值正常,但不能判斷是否線束以及插件虛接問(wèn)題,可以將兩端低壓插件安裝好之后,抓住線束用力搖晃,如果儀表轉(zhuǎn)速出現(xiàn)異常波動(dòng),則仍需仔細(xì)排查線束和低壓插件。
2023-07-31 09:49:225309 
一.原理旋變,是電機(jī)控制中常用的一種位置傳感器,旋轉(zhuǎn)變壓器的作用就是精準(zhǔn)測(cè)量電機(jī)轉(zhuǎn)子的位置、轉(zhuǎn)速及旋轉(zhuǎn)方向,將這些信號(hào)傳輸給電控,由軟件的控制算法來(lái)控制電機(jī)。它可以控制三相交流電的頻率和次序,從而
2023-08-02 08:09:3310551 
旋轉(zhuǎn)變壓器(旋變)是目前電動(dòng)汽車電機(jī)控制器中常用的一種位置傳感器,用來(lái)反映驅(qū)動(dòng)電機(jī)轉(zhuǎn)子的位置、轉(zhuǎn)速及旋轉(zhuǎn)方向,提供給電機(jī)控制器內(nèi)軟件做電機(jī)的算法控制。
2023-08-11 16:26:016527 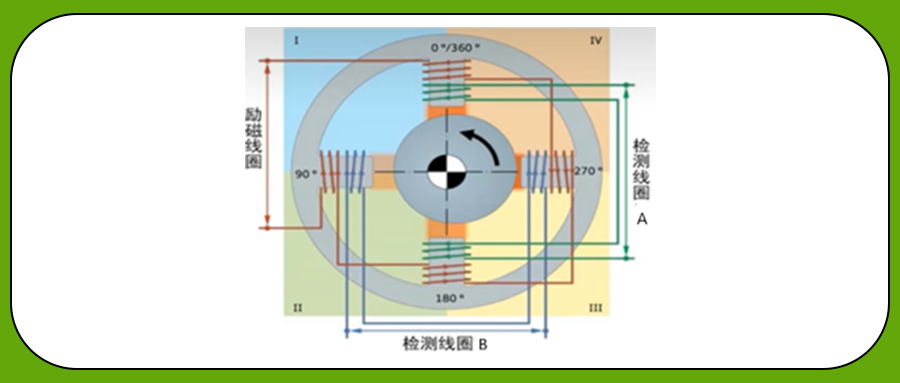
旋變信號(hào),作為一種非常重要的測(cè)量信號(hào),廣泛運(yùn)用于工業(yè)自動(dòng)化、航空航天等領(lǐng)域。然而,對(duì)于許多專業(yè)人士和科研工作者來(lái)說(shuō),旋變信號(hào)的測(cè)量一直是一個(gè)難題。今天,我們將探討一種新穎而高效的測(cè)量技術(shù):高壓差分探頭。它是否適用于旋變信號(hào)的測(cè)量?答案即將揭曉!
2023-10-20 10:01:051216 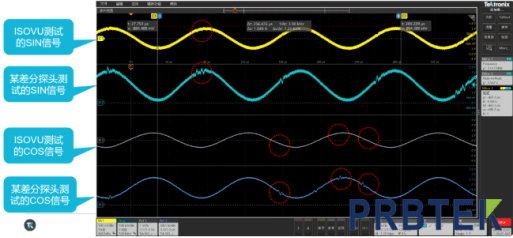
旋變信號(hào)能否使用高壓差分探頭測(cè)量? 旋變信號(hào)(也稱為旋向變量、相位差等)是指隨時(shí)間變化的相位角度。它在各種領(lǐng)域中都有廣泛的應(yīng)用,如電力系統(tǒng)、通信系統(tǒng)和自動(dòng)控制系統(tǒng)等。測(cè)量旋變信號(hào)的一種方法是使用高壓
2024-01-05 14:54:311342 旋變的標(biāo)定在日常工作中有很多通俗的說(shuō)法,比如說(shuō)零位角標(biāo)定、電機(jī)角標(biāo)等等。雖然說(shuō)法不同,但是內(nèi)容及功能是一致的,就是要知道旋變的零位與電機(jī)的零位之間的角度偏差。
2024-04-20 09:42:453988 
,從而可以改變驅(qū)動(dòng)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)向(正轉(zhuǎn)和反轉(zhuǎn))。當(dāng)永磁同步電機(jī)在工作時(shí),定子線圈產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)和轉(zhuǎn)子同步轉(zhuǎn)動(dòng),并且旋轉(zhuǎn)磁場(chǎng)磁極和轉(zhuǎn)子磁極會(huì)保持一定的夾角,而監(jiān)測(cè)轉(zhuǎn)子的位置和轉(zhuǎn)速的就是旋變。 旋變的原理:通過(guò)給
2024-04-23 08:38:095365 
替換AD2S1210,旋變轉(zhuǎn)換芯片SC2167應(yīng)用于編碼器仿真
2025-02-05 10:01:431233 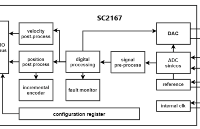
分辨率 RDC,片內(nèi)集成了可編程正旋波振蕩器,為旋變器提供激勵(lì)信號(hào)。由于工作環(huán)境惡劣,AD2S1210 的額定溫度范圍為-40℃至 125℃的擴(kuò)展工業(yè)溫度范圍。下
2025-03-08 15:29:023
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論