雙極性步進電機的驅動電路則如圖2所示,它會使用八顆晶體管來驅動兩組相位。雙極性驅動電路可以同時驅動四線式或六線式步進電機,雖然四線式電機只能使用雙
2010-06-11 09:28:24 6751
6751 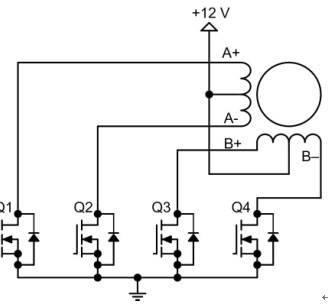
介紹了BYG通用系列二相步進電機最常采用的的單極性和雙極性2種驅動電路的設計方案,從原理上體現了二相步進電機的控制方法,增加了步進電機驅動電路設計的靈活性。
2014-09-12 17:13:0614337 
雙極性步進電機由兩組線圈四線組成,它不像單極性步進電機線圈有中間抽頭。有這樣的好處是電流通過整組線圈而不是線圈的一半。這樣在同規格的步進電機,雙極性的步進電機比單極性的步進電機有更大的扭矩。當然,雙極性電機就需要更復雜的控制電路來控制步進電機。
2023-03-08 15:42:091994 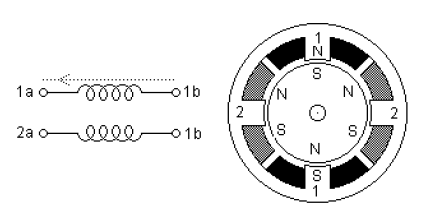
步進電機和伺服電機的性能差異源自他們不同的電機設計方案。步進電機的極數比伺服電機多得多,因此步進電機旋轉一整圈,所需的繞組電流交換次數要多得多,從而導致在速度增加的情況下,其轉矩迅速下降。
2023-07-13 10:53:452379 
息息相關。 本文將介紹雙極性步進電機及其結構和控制模式。 雙極性步進電機的基本組件 步進電機屬于無刷直流 (BLDC) 電機,它按照等長的步進值逐步轉動。而雙極性步進電機則是每相都擁有一個繞組的步進電機,具體而言是兩相四
2023-08-21 11:31:171835 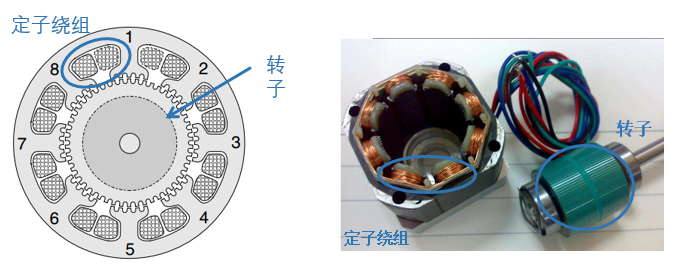
描述單極步進電機控制
2022-06-30 06:30:59
單極步進電機使用一個繞組,每相一個中心抽頭。繞組的每個部分在磁場的每個方向上接通。通過換向電路可以使每個繞組相對簡單,這是因為該裝置具有一個磁極,該磁極可以在不切換電流方向的情況下反轉。在大多數
2021-07-07 08:11:16
“步”。有兩種類型的步進電機,單極型和雙極型晶體管,而且知道你正在使用哪種類型是非常重要的。每種電機,都有一個不同的電路。示例代碼將控制兩種電機。看看單極性和雙極性電機的原理圖,和關于如何連接你的電...
2021-07-08 09:14:42
為了方便講解,這里采用一個電磁線圈。由于異性相吸,從而轉子就會發生轉動,這個轉動正是步進電機轉的一步。步進電機的分類步進電機按極性來分,可分為雙極性步進電機和單極性步進電機。在實驗中所用的都是雙極性步進電機。下圖中為雙極性步進電機完成1步的演示按圖片順序來如果讓電機繼續旋轉,就
2021-07-07 07:25:59
步進電機基礎(5.3)-步進電機的單極驅動與雙極驅動、激磁方式前言基本信息前言說明5.3 單極驅動與雙極驅動5.4 激磁方式前言基本信息名稱描述說明教材名稱步進電機應用技術作者坂本正文譯者王自強前言
2021-07-08 08:57:25
步進電機總結步進電機分為單極性和雙極性單極性,COM端一直通電,通過另外四相的組合,實現正反轉(電流方向),半步等功能雙極性,通過各相位的通電組合實現轉動,半步等功能,細分器是通過改變各相的電流大小
2021-06-30 07:11:45
和雙極型。在相同電流且相同轉矩輸出的條件下,單極型步進電機比雙極型步進電機多一倍的線圈,成本更高,控制電路的結構也不一樣,目前市場上流行的大多是雙極型步進電機。此外,步進電機在構造上通常按照轉子特點
2022-10-30 11:39:10
一:線、相、極性“相” 就是說明步進電機有幾個線圈(也叫做繞組)。“線” 就是說明步進電機有幾個接線口。“極性” 分為 單極性 和 雙極性。如果步進電機的線圈是可以雙向導電的,那么這個步進電機就是雙
2021-07-07 07:43:37
概述:PBD3517是一款雙極、單片、集成電路,旨在以單極、雙層方式驅動步進電機。一個PBD 3517/1和至少一個外部組件構成一個完整的控制和驅動單元,用于LS-TTL或微處理器控制的步進電機系統,...
2021-04-07 06:42:03
該步進電機為一四相步進電機,采用單極性直流電源供電。只要對步進電機的各相繞組按合適的時序通電,就能使步進電機步進轉動。圖1是該四相反應式步進電機工作原理示意圖。
2023-09-21 06:38:48
介紹了BYG通用系列二相步進電機最常采用的的單極性和雙極性2種驅動電路的設計方案,從原理上體現了一相步進電機的控制方法,增加了步進電機驅動電路設計的靈活性。二相步進電機的單極性和雙極性2種驅動
2025-05-28 15:38:41
什么是雙極性步進電機?
2021-10-27 07:11:07
什么是步進電機?步進電機有哪些特點?步進電機有哪些優缺點?步進電機的工作原理是什么?
2021-06-18 09:59:06
這里把步進電機的資料做個整合文章目錄步進電機是什么原理定子定子的種類轉子及其種類工作方式單拍方式雙拍方式單雙拍方式通電方式驅動器步進電機是什么什么是步進電機?步進電機是將電脈沖信號,轉變為角位移或線
2021-07-07 06:55:49
從步進電機驅動IC的角度看步進電機,歸納相關知識點。一、單極性與雙極性電機: 單極性電機,由單極性IC驅動。其一端接Vcc,另一端由IC控制連接或斷開。 而雙極性電機,由雙極性IC驅動。雙端都由IC控制。二、單極性電機的內部結構:
2021-08-31 06:31:50
DM330022,dsPICDEM MCSM開發板旨在以開環或閉環(電流控制)模式控制單極和雙極步進電機。硬件的設計使得無論是雙極還是單極配置的8,6或4線步進電機都不需要進行硬件更改。提供了在完全
2019-07-01 12:35:06
伺服電機和步進電機的部分原理有什么差異?
2021-09-30 07:17:22
)。“極性” 分為單極性和雙極性。如果步進電機的線圈是可以雙向導電的,那么這個步進電機就是雙極性的;相反,如果步進電機的線圈是只允許單向導電的,那么這個步進電機就是單極性的。上面三個只要知道其中兩個
2018-10-17 10:20:27
雙極步進驅動級。此模塊包含驅動很多不同類型的雙極步進電機所需的一切,并且還可改作雙路刷式直流電機驅動器。BOOST-DRV8711 非常適合想要詳細了解步進電機控制技術和驅動級設計的人士。此套件旨在
2015-04-29 11:47:12
步進電機與伺服電機的工作原理是什么?單/雙極性步進電機對比分析哪個好?步進電機有哪些基本參數?
2021-09-24 08:08:37
圖1:六線單極步進電機繞組連接這種配置中,電機通過接通電機繞組的各個段來進行換向,這意味著電流僅需在一個方向上流動。這種配置可以簡化驅動電路的設計,因為只需要四個低側開關和續流二極管即可接通繞組
2022-11-07 07:48:46
Arduino步進電機控制示例在本文中,我們將展示如何連接雙極步進電機到Arduino Uno板,步進電機使用的是四線雙極步進電機。由于步進電機所需要的電流比Arduino處理器所能承受的電流要
2021-08-31 06:48:00
如何連接雙極步進電機到Arduino Uno板?
2021-10-28 09:07:16
LV8727GEVB,LV8727評估板是一款微步進步進電機驅動器,用于PWM控制的雙極步進電機。這款LV8727支持8個微步進分辨率,分別為Half,1 / 8,1 / 16,1 / 32,1 / 64,1 / 128,1 / 10和1/20,僅通過步進輸入驅動
2020-05-19 09:30:50
抽頭。 圖3:四線雙極步進電機繞組連接由于缺少中心抽頭,雙極步進電動機需要電流在繞組中的兩個方向上流動,因此需要更多的電子器件來推動和拉動電流。現在可以接通全繞組,從而產生更高的可用轉矩,這與單極繞組
2020-12-17 10:05:28
我們公司是供應信濃步進電機、減速步進電機、閉環步進電機、剎車步進電機、絲桿步進電機、中空旋轉平臺、步進驅動器、驅動芯片等
2024-11-22 11:37:25
雙極型兩相步進電機恒流驅動電路
2009-02-09 16:17:251843 
步進電機是什么意思
什么是步進電機步進電機是一種將電脈沖轉化為角位移的執行機構。通俗一點講:當步進驅動器接
2009-06-28 10:50:1510199 步進電機的應用
(一)步進電機的選擇步進電機有步距角(涉及到相數
2010-01-09 15:11:264427 單極性步進電機控制器電路--Unipolar Stepper Motor Controller
This is a very good integrated circuit. There is no need for any external glue logic to drive the circui
2010-01-13 21:06:382162 
高電流雙極步進電機控制器電路,High current bipolar stepper motor controller
2010-02-27 09:32:512615 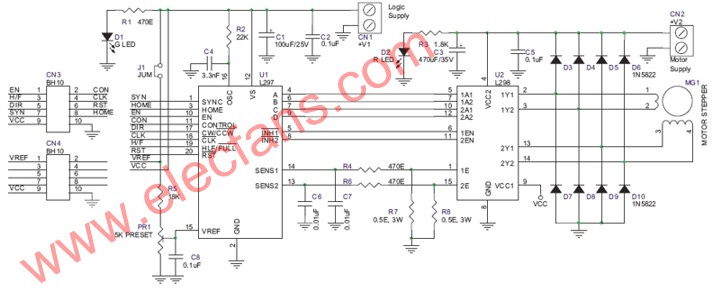
東京—東芝公司(TOKYO:6502)今天宣布推出適用于步進電機的一款雙單極電機驅動器芯片(IC)TB67S158。
2014-09-03 14:09:072057 
該步進電機為一四相步進電機,采用單極性直流電源供電。只要對步進電機的各相繞組按合適的時序通電,就能使步進電機步進轉動。
2016-07-01 15:43:59 84
84 步進電機是一種將數字脈沖信號轉化為角位移的執行機構。也就是說,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(即步進角、步距角)。
2017-05-24 17:11:337308 這里以四線雙極性步進電機為例:上面就是常見的四線雙極性步進電機的實物圖,上一篇文章里面已經說明了步進電機的相
2017-11-27 06:49:0027853 本文開始介紹了步進電機的基本原理,其次介紹了步進電機工作效率以及使步進電機的效率最大化的方法,最后介紹了步進電機選型的步驟與方法。
2018-04-25 14:06:015391 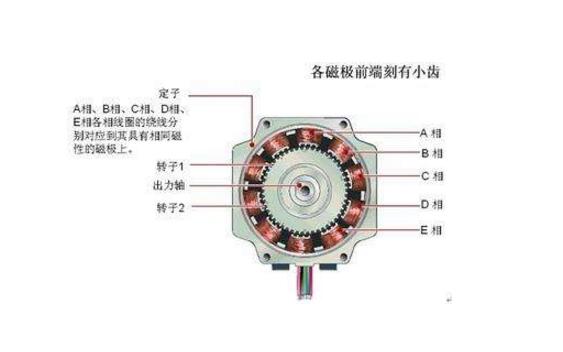
在相同電流且相同轉矩輸出的條件下,單極型步進電機比雙極型步進電機多一倍的線圈,成本更高,控制電路的結構也不一樣,目前市場上流行的大多是雙極型步進電機。
2018-07-17 18:34:0339735 
步進電機是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,它的旋轉是以固定的角度一步一步運行的。
2018-12-23 09:22:247607 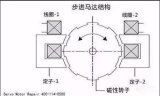
前面我們已經討論了雙極步進電機和驅動器。單極電機與雙極電機類似,不同的是在單極電機中外部能夠接觸到的只有每個繞組的中心抽頭,如圖6所示。我們將從繞組頂部抽出的抽頭標為抽頭B,底部抽出的標為抽頭A,中間的為抽頭C。
2019-08-16 17:05:295112 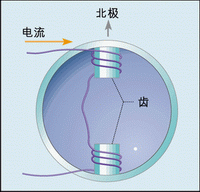
在單極配置下,因為在任何時刻只有一半的繞組在使用,其銅的成本和功率重量比和功率大小比都差于雙極繞組。另一方面,雙極設置中電驅動配套比較復雜。然而,現代步進驅動器IC很輕松的取代了驅動拓撲結構,使繞組的這方面考慮和步進電機選擇幾乎不再成為一個問題。
2019-08-28 11:28:2011898 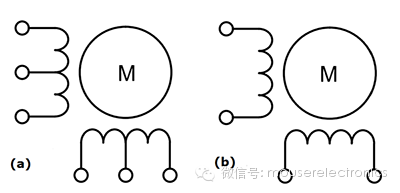
步進電機是一種離散步進運動的電磁裝置。 它有幾個線圈,組成“相位”,當每相依次通電時驅動電機。
2020-10-05 16:42:0016551 在許多領域都需要各種電機,包括知名的步進電機和伺服電機。但是,對于許多用戶而言,他們不了解這兩種電機的主要區別,因此他們始終不知道如何選擇。那么,步進電機和伺服電機之間的主要區別是什么? 基本結構
2020-09-10 17:47:3430268 步進電機有許多不同類型,但永磁體和混合步進電機有兩種主要繞組配置,通過兩相驅動單極性和雙極性。單極電機的常見接線配置是連接到電機繞組(A +,A-,B +和B-)的六根導線,以及連接到電機供電電壓
2020-11-05 10:16:084628 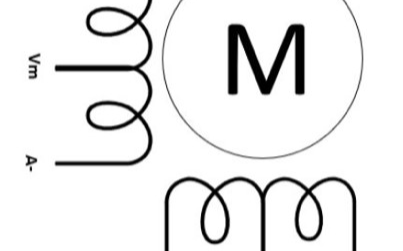
步進電機從其結構形式上可分為反應式步進電機、永磁式步進電機、混合式步進電機、單相步進電機、平面步進電機等多種類型。
2020-12-26 08:30:355608 從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2021-06-12 11:55:003345 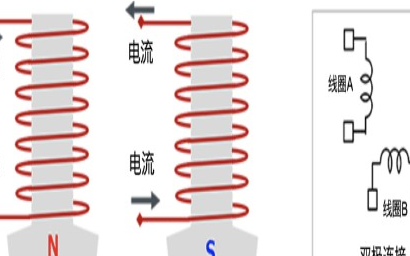
控制繞組,按正確順序正反通電,從而實現電機的運轉。 ? ? ? ?以兩相1.8度步進電機為例,主要有4線雙極性和6線單極性兩種方法: ? 4線雙極性電機 ? ? ? ?當繞組的通電方向按順序ac-bd-ca-db 四個狀態周而復始進行變化時,每變化一
2021-08-11 18:04:0033634 步進電機有許多不同類型,但永磁體和混合步進電機有兩種主要繞組配置,通過兩相驅動——單極性和雙極性。單極電機的常見接線配置是連接到電機繞組(A +,A-,B +和B-)的六根導線,以及連接到電機供電
2022-01-13 14:58:384281 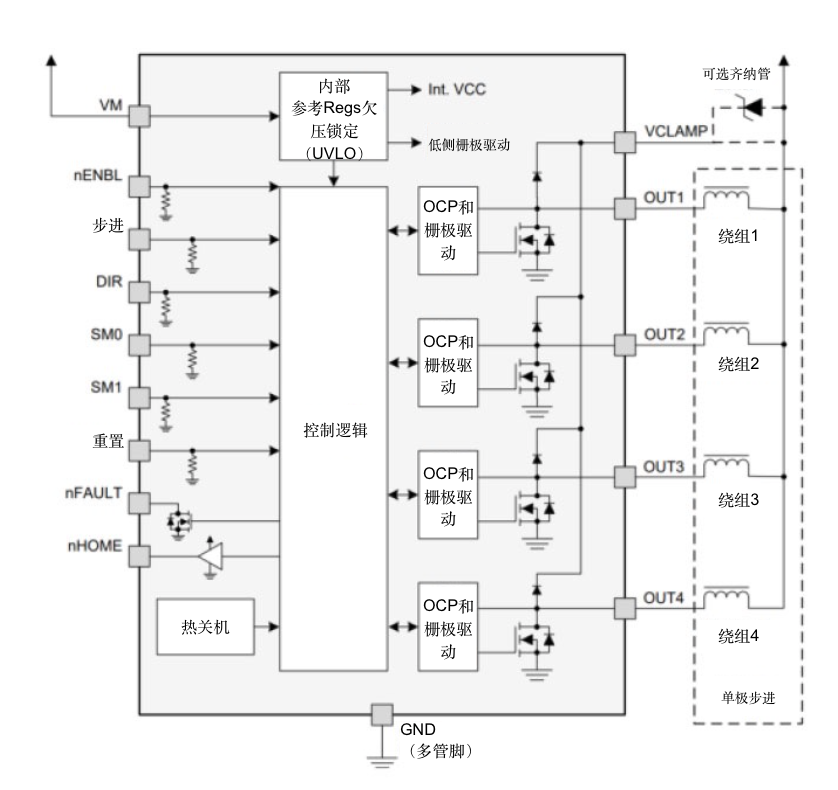
該雙極步進電機驅動器電路將使用外部提供的 5V 電平驅動雙極步進電機,用于步進和方向。這些通常來自計算機中運行的軟件或微控制器單元。該電路使用 IRFZ44 和 MTP2955 MOSFET。
2022-06-13 15:09:406056 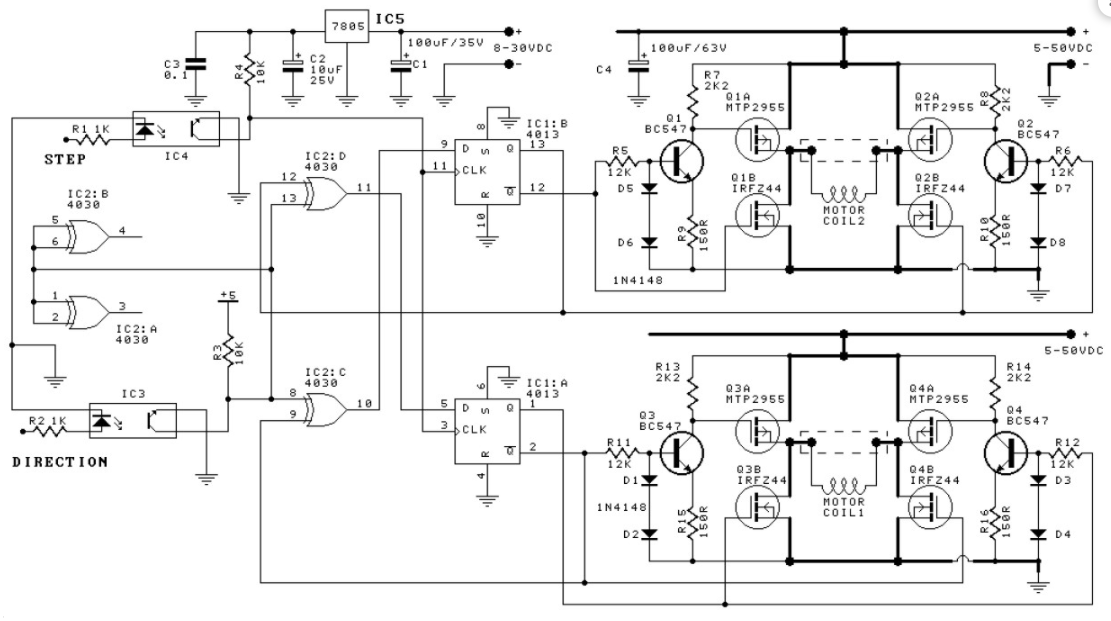
這是單極步進電機驅動器的電路設計,用于控制 5、6 或 8 線的單極步進電機。它使用四個 MOSFET IRFZ44。該電路可以在獨立式或 PC 控制模式下運行。
2022-06-21 16:03:524362 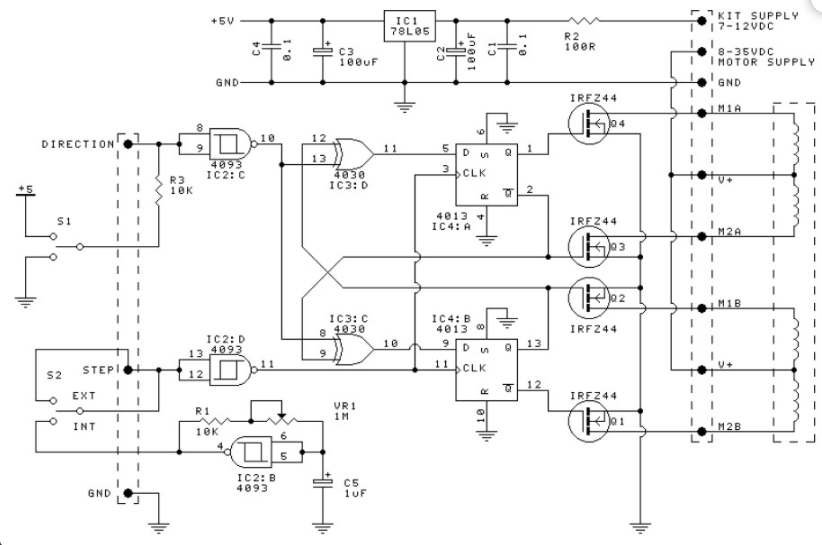
電子發燒友網站提供《單極步進電機控制.zip》資料免費下載
2022-07-06 11:17:222 針 對 雙 極 步進 電機 的控 制 特 點 ,充 分 利 用 增 強 型 STM32在 電機 控制 中 的優 勢 ,提 出 基 于 STM32的雙 極 步 進
電機驅 動方案 。對該系統的硬件
2022-10-08 10:38:4510 單極性步進電機和雙極性步進電機的典型應用如圖1和圖2所示,除了驅動電路與電機的接法差異外,雙極性步進電機因需要H橋驅動,驅動內部需要電平移位及自適應死區限制,電路較為復雜。而單極性步進電機僅需低側驅動,高側為二極管續流,因而簡化了驅動電路設計,具有更高的可靠性及性價比。
2022-10-19 10:10:296633 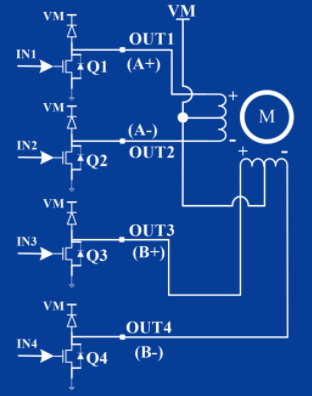
只要簡單接線配置,輕松將單級步進電機作為雙級步進電機進行驅動
2022-10-28 12:00:260 BYG通用系列二相步進電機最常采用的單極性和雙極性2種驅動電路的設計方案。從原理上體現了二相步進電機的控制方法,增加了步進電機驅動電路設計的靈活性。二相步進電機的單極性和雙極性2種驅動電路設計都采用
2023-01-15 17:17:2515780 在新開始的“步進電機”篇系列文章中,將介紹步進電機的結構、步進電機的工作原理、步進電機的特性和步進電機的驅動方法。什么是步進電機?步進電機是一種可以與脈沖信號同步準確地控制旋轉角度和轉速的電機,步進電機的也稱為“脈沖電機”。
2023-02-24 09:51:093540 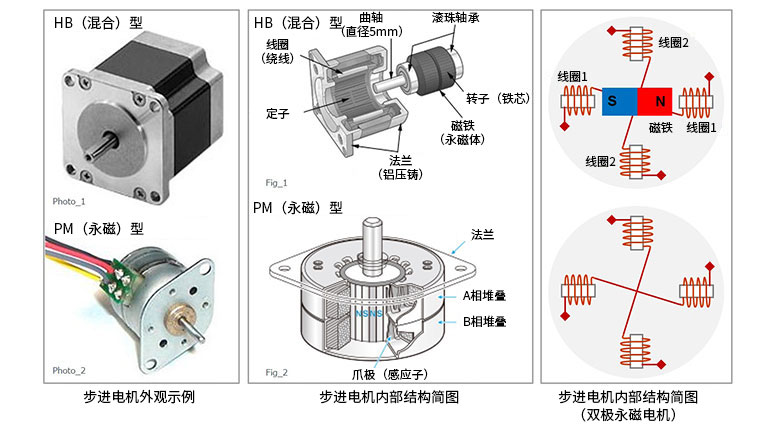
繼步進電機的結構之后,本文將介紹步進電機的基本工作原理。步進電機的基本工作原理(單相勵磁),下面使用下圖來介紹步進電機的基本工作原理。這是上一篇“步進電機的結構”中給出的兩相雙極型線圈每一相(一組線圈)的勵磁示例。
2023-02-24 09:51:105867 
本文將介紹步進電機的基本特性。步進電機的基本特性:下圖顯示了步進電機的轉矩和速度之間的關系。縱軸為轉矩,橫軸為脈沖頻率。
2023-02-24 09:51:103720 
兩相雙極步進電機的驅動:驅動電路,先來看兩相雙極驅動電路的基本框圖示例。可使用雙通道的H橋驅動電路來驅動兩相雙極步進電機。
2023-02-24 09:51:113204 
在上一篇文章“兩相雙極步進電機的驅動 其1”中,給出了兩相雙極步進電機的基本驅動電路示例和驅動波形。此次“兩相雙極步進電機的驅動 其2”篇,將介紹驅動兩相雙極步進電機過程中電流再生時的Decay:電流衰減。
2023-02-24 09:51:114361 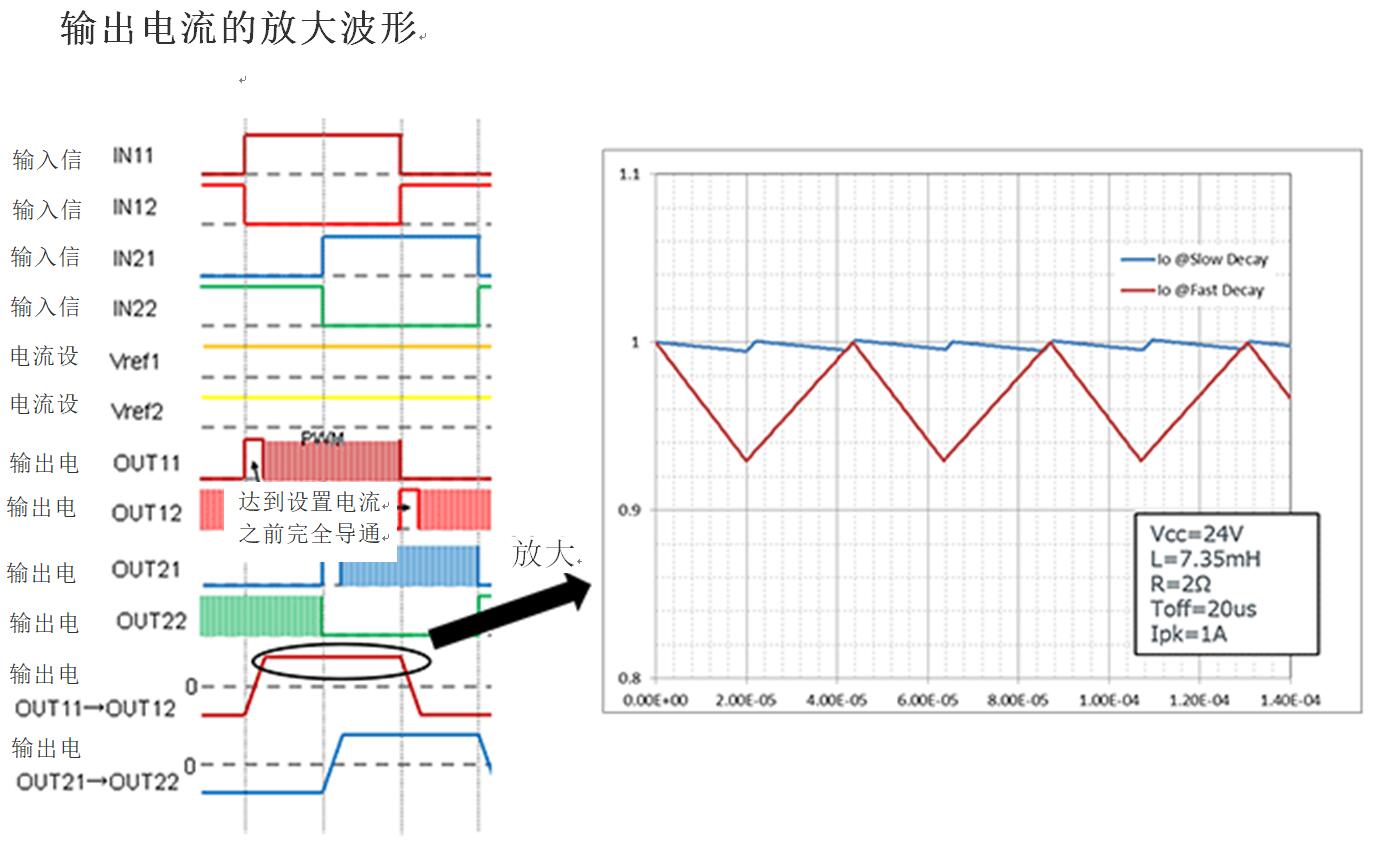
繼上一篇“兩相雙極步進電機的驅動”之后,本文將從兩相單極步進電機的驅動電路,兩相單極步進電機的兩相勵磁PWM驅動波形兩個方面來介紹“兩相單極步進電機的驅動”。如欲了解有關雙極步進電機和單極步進電機之間差異的更多信息,請參考這里。
2023-02-24 09:51:114501 
克服旋轉振動的CVD 系列 2 相雙極步進電機驅動器
2023-03-08 11:00:281835 
最簡單的步進電機驅動方法是單相雙極驅動方式,也稱為雙相步進驅動方式。該方式只需要使用一個 H橋驅動器和一個脈沖發生器,即可實現步進電機的驅動控制。
2023-03-08 14:21:5616851 步進電機的慣量選擇需要考慮到兩個方面:
電機本身的慣量:電機的慣量越大,電機的加速和減速所需要的時間就越長。因此,在選擇步進電機時,需要根據應用需求和控制系統的要求綜合考慮電機的慣量
2023-03-08 14:26:406758 步進電機是一種特殊的電機,可以通過輸入脈沖信號來控制它的位置和運動。步進電機通常由電機本體和驅動電路組成,驅動電路負責將輸入的脈沖信號轉換為電機的運動控制信號。
2023-03-08 14:33:335285 步進電機是一種可以與脈沖信號同步準確地控制旋轉角度和轉速的電機,步進電機的也稱為“脈沖電機”。由于步進電機無需使用位置傳感器僅通過開環控制即可實現準確的定位而被廣泛用??于需要定位的設備中。
2023-03-09 11:49:322782 
改變步進電機的速度和扭矩特性的一種簡單方法是將其連接到不同類型的驅動器或更改其接線配置。然而,還有更多。了解“單極”和“雙極”之間的優缺點可以成就或破壞步進電機的性能。
2023-03-09 15:16:327070 
從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:051799 
。 1)步進電機的內部結構 先簡單介紹一下主要的兩種步進電機:單極性和雙極性。 如下圖所示, 左邊是單極性 電機; 右邊是雙極性 電機。單極性電機線圈內的電流只有一個方向,雙極性電機線圈內的電流是雙向的:
2023-03-16 09:28:427 基礎參數介紹 轉矩 相、極 步距角、極性 步進方式 四、步進電機特性 矩角特性 靜態特性 靜態穩定區 多拍的矩角特性族動態特性 轉子的震蕩過程 共振現象 共振的解決方案矩頻特性與起動慣頻特性 該文章主要介
2023-03-21 14:32:2910 雙極性步進電機每個繞組都可以實現兩個方向通電,故各繞組的某一端既可以是N極也可以是S極。因為它有兩組獨立的
線圈,所有還被稱為兩相步進電機
2023-03-21 11:43:221 步進電機有許多不同類型,但永磁體和混合步進電機有兩種主要繞組配置,通過兩相驅動——單極性和雙極性。單極電機的常見接線配置是連接到電機繞組(A +,A-,B +和B-)的六根導線,以及連接到電機供電電壓Vm的每相的中心抽頭,如圖1所示。
2023-03-22 09:21:033632 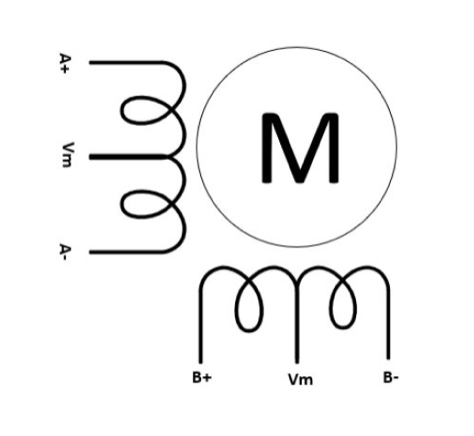
的不斷變化持續轉動。
步進電機的“相”表明步進電機有幾個線圈,也稱為繞組;“極性”則分為單極性和雙極性這兩種。區別單極性與雙極性主要是看線圈能不能雙向導電,即電流是否既能從線圈某個端口進入或者出來。下圖分 別是
2023-03-22 10:39:361 ° /P*Nr?????????????? 公式(2. 1) 步進電機的步距角θs,其中Nr 為轉子極對數,P為定子相數 θs = ± [ (360°/mP) - (360°n/Nr) ]??????公式(
2023-03-23 09:30:391 步進電機和伺服電機哪個好,這個沒有絕對的答案,適合的才是最好的!下面從步進電機和伺服電機各種的優缺點、性能特點
進行分析:
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:326 了解如何使用 Arduino 使用 ULN2003、L298N 和 A4988 等驅動器控制雙極和單極步進電機。在本文中,我將向您展示開始使用步進電機所需了解
的所有信息。
步進電機用于各種設備
2023-03-23 10:58:311 有關單極驅動方式與雙極驅動方式,已在第2章說明,此處再舉例說明。 VR型步進電機定子磁極吸引轉子時,由于轉子磁極為永久磁極,有磁化的N極和S極,不論定子繞組激磁所產生極性為N極還是S極均會產生吸引力
2023-03-24 11:41:181 反應式步進電機和永磁式步進電機都是常見的步進電機類型,它們的區別主要在于其工作原理和結構。
反應式步進電機是利用異步電機的原理,將定子繞組分為兩個或以上繞組,同時用電子器件(如晶閘管)控制
2023-03-27 16:11:143277 電子發燒友網站提供《單極步進電機控制庫.zip》資料免費下載
2023-07-11 11:29:420 TIDA-00872 演示了如何將 DRV8711 雙極步進電機柵極驅動器重新配置為單極步進電機柵極驅動器。此 PCB 連接到 MSP430G2 LaunchPad 從而可以進行快速評估和調節。此 PCB 的工作電壓范圍為 15V 至 40V,具有 5A 的滿標電流。
2023-08-02 11:28:350 在許多領域都需要各種電機,包括知名的步進電機和伺服電機。但是,對于許多用戶而言,他們不了解這兩種電機的主要區別,因此他們始終不知道如何選擇。那么,步進電機和伺服電機之間的主要區別是什么?基本結構
2023-08-22 08:08:477427 
的結構(兩相雙極)下圖從左到右分別是步進電機的外觀示例、內部結構簡圖和結構概念簡圖。在外觀示例中,給出的是HB(混合)型和PM(永磁)型步進電機的外觀。在中間的結構圖
2023-08-29 08:08:454135 伺服電機和步進電機在控制精度、低頻特性、矩頻特性、過載能力、編碼器類型等方面存在顯著差異。
2024-01-16 10:27:422932 步進電機控制方法 步進電機是一種將電信號轉化為機械轉動的電動機,其輸出轉角是按照電脈沖控制信號的變化而變化的。步進電機的控制方法有幾種常見的方式,包括全步進控制、半步進控制和微步進控制。 全步進控制
2024-01-22 17:18:182072 步進電機的雙極連接和單極連接是指其電氣接線方式,這兩種方式影響電機的驅動方法、控制電路設計以及性能。了解這些接線方式對于正確選擇和使用步進電機至關重要。 雙極連接(Bipolar):在雙極連接方式中
2024-02-06 10:42:544500 
什么是步進電機的細分控制?步進電機為什么要細分,如何細分? 步進電機的細分控制是一種控制技術,通過對電機驅動信號的細分來實現提高電機精度和減小振動、噪音的目的。步進電機是一種常用的電機類型,它通過
2024-02-18 09:39:3210295 在現代工業、自動化控制以及精密儀器等領域中,步進電機因其獨特的步進特性和精確的位置控制而得到廣泛應用。其中,雙極性步進電機作為一種常見的步進電機類型,其獨特的雙極性設計和高效能特點,使其在這些領域中占據了重要位置。本文將對雙極性步進電機進行詳細介紹,包括其定義、特點以及應用。
2024-06-12 11:50:082435 在現代工業控制領域,步進電機以其獨特的步進特性和精確的位置控制而備受青睞。其中,雙極性步進電機作為步進電機的一種重要類型,憑借其高效、可靠的性能,在自動化生產線、精密測量儀器等多個領域得到了廣泛應用。本文將對雙極性步進電機的結構和控制模式進行詳細介紹,旨在為讀者提供深入的了解和認識。
2024-06-12 14:40:291721 雙極步進電機(也稱為兩相步進電機)是一種特殊的電機類型,它能夠將電脈沖信號轉換為精確的角位移或線位移。這種電機通常包含兩個主要的線圈(或稱為相),每個線圈都有兩個導線(總共四根線),用于控制電機的轉動。
2024-06-20 16:30:401729 
與所有電機一樣,步進電機也有 定子和轉子 ,但與普通直流電機不同的是,定子由單獨的線圈組組成。線圈的數量會根據步進電機的類型而有所不同,但現在只需了解,在步進電機中,轉子由金屬極組成,每個極將被定子中的一組線圈吸引。下圖顯示了具有 8 個定子極和 6 個轉子極的步進電機。
2024-06-20 17:10:393752 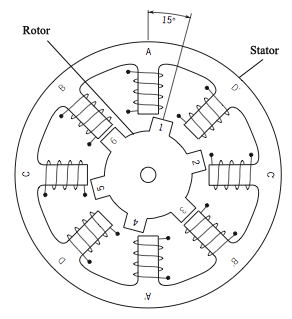
、2表示雙出軸。
步進電機SMH2304-2:SM是混合式步進電機代碼;H是系列代碼;23是電機機座號;04是機身長度;2表示出軸方式為雙出軸。
步進電機選型請咨詢官網在線客服,或者來電咨詢!
2024-08-26 09:42:472283 
在電機控制領域,工程師們不斷尋找能夠在性能、可靠性和易于集成之間達到平衡的組件。東芝的TB62214FG雙極步進電機驅動IC正是這樣一種解決方案,適用于需要精確電機控制的多種
2024-10-31 11:08:01926 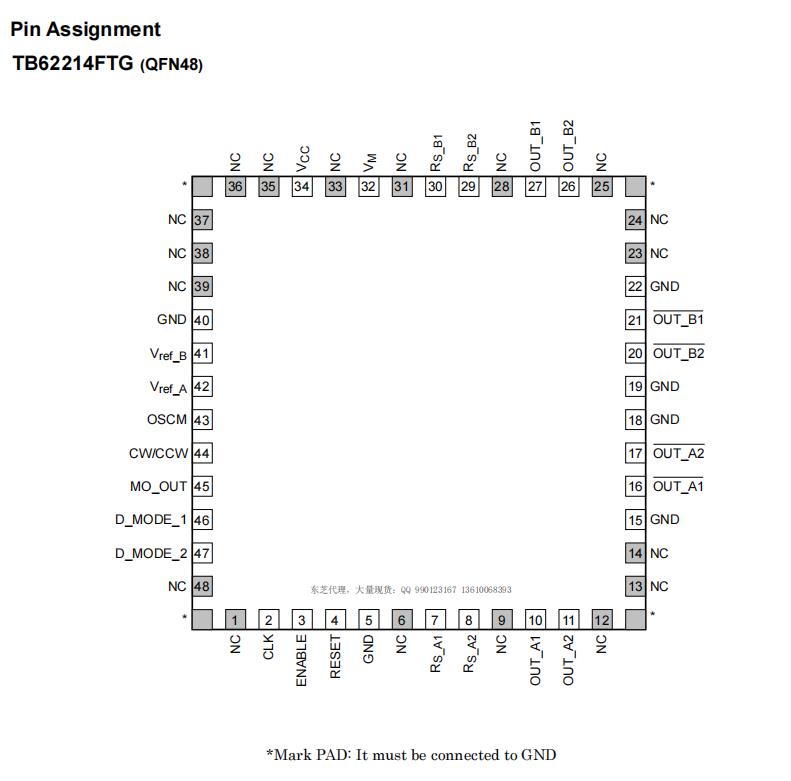
步進電機是一種將電脈沖信號轉變為角位移或線位移的開環控制電機。其工作原理是通過電子電路將直流電分為多相序控制電流,使用這種電流給步進電機供電,步進電機才能正常工作。每輸入一個電脈沖,步進電機轉動一個固定的角度,稱為“步距角”。通過控制脈沖數量和頻率,可以精確控制電機的旋轉角度和速度?。
2024-11-16 15:11:511557 
該DRV8805為驅動單極步進電機提供了集成解決方案。它 包括四個具有過流保護的低側驅動器,并提供內置二極管進行箝位 電機繞組產生的關斷瞬變。
使用簡單的步進/方向接口控制單極步進電機的分度器邏輯 也是集成的。支持三種步進模式:2相(全步)、1-2相(半步)、 和 1 相(波驅動)。
2025-10-20 13:44:27499 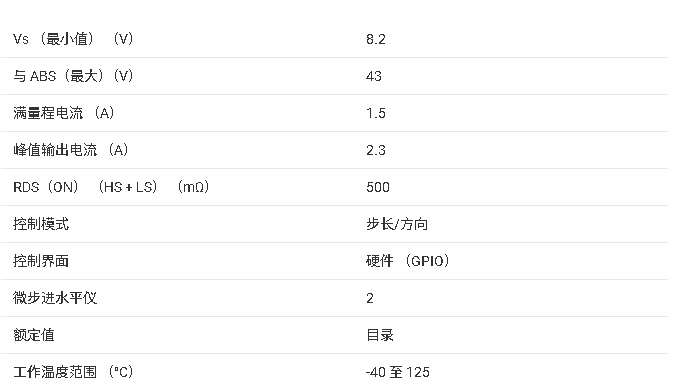
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論