步進(jìn)電機(jī)相電流的測(cè)量是一項(xiàng)涉及電子和機(jī)械技術(shù)的重要工作,主要用于確保電機(jī)正常運(yùn)轉(zhuǎn)、故障診斷和優(yōu)化電機(jī)性能。下面將為您提供一篇詳盡、詳實(shí)、細(xì)致的關(guān)于步進(jìn)電機(jī)相電流測(cè)量的文章。 一、步進(jìn)電機(jī)相電流測(cè)量
2023-12-13 15:47:24 6915
6915 一、靜態(tài)指標(biāo)術(shù)語(yǔ) 二、動(dòng)態(tài)指標(biāo)術(shù)語(yǔ) 三、步進(jìn)電機(jī)加減速過(guò)程控制技術(shù) 四、步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)控制 五、步進(jìn)電機(jī)控制策略
2021-07-08 09:25:50
步進(jìn)電機(jī)總結(jié)步進(jìn)電機(jī)分為單極性和雙極性單極性,COM端一直通電,通過(guò)另外四相的組合,實(shí)現(xiàn)正反轉(zhuǎn)(電流方向),半步等功能雙極性,通過(guò)各相位的通電組合實(shí)現(xiàn)轉(zhuǎn)動(dòng),半步等功能,細(xì)分器是通過(guò)改變各相的電流大小
2021-06-30 07:11:45
步進(jìn)電機(jī)是什么?步進(jìn)電動(dòng)機(jī)是由哪些部分組成的?步進(jìn)電機(jī)的工作原理是什么?怎樣去選擇步進(jìn)電機(jī)?
2021-10-08 08:16:24
按照常理來(lái)說(shuō),步進(jìn)電機(jī)接線要根據(jù)線的顏色來(lái)區(qū)分接線。但是不同公司生產(chǎn)的步進(jìn)電機(jī),線的顏色不一樣。特別是國(guó)外的步進(jìn)電機(jī)。那么,步進(jìn)電機(jī)接線應(yīng)該用萬(wàn)用表打表。步進(jìn)電機(jī)內(nèi)部構(gòu)造如下圖:通過(guò)上圖可知,A
2021-07-08 09:26:13
電機(jī)行業(yè)專業(yè)術(shù)語(yǔ)
2021-01-26 07:30:36
以下小節(jié)描述ARM文檔中使用的約定。
術(shù)語(yǔ)表ARM術(shù)語(yǔ)表是ARM文檔中使用的術(shù)語(yǔ)列表,以及這些術(shù)語(yǔ)的定義。
ARM詞匯表不包含符合行業(yè)標(biāo)準(zhǔn)的術(shù)語(yǔ),除非ARM的含義與普遍接受的含義不同。
有關(guān)更多信息
2023-08-21 07:21:42
Arm術(shù)語(yǔ)表是Arm文檔中使用的術(shù)語(yǔ)列表,以及這些術(shù)語(yǔ)的定義。除非Arm的含義與公認(rèn)的含義不同,否則Arm術(shù)語(yǔ)表不包含行業(yè)標(biāo)準(zhǔn)術(shù)語(yǔ)。
2023-08-10 07:34:41
以下小節(jié)描述ARM文檔中使用的約定。
術(shù)語(yǔ)表ARM術(shù)語(yǔ)表是ARM文檔中使用的術(shù)語(yǔ)列表,以及這些術(shù)語(yǔ)的定義。
ARM詞匯表不包含符合行業(yè)標(biāo)準(zhǔn)的術(shù)語(yǔ),除非ARM的含義與普遍接受的含義不同。
有關(guān)更多信息
2023-08-25 07:37:48
A術(shù)語(yǔ)簡(jiǎn)介 APSSApplications SubsystemACDB Audio Calibration Database ADCAnalog-to-Digital Conversion,模擬 - 數(shù)字轉(zhuǎn)換 ...
2021-07-28 09:26:07
Arm?詞匯表是Arm文檔中使用的術(shù)語(yǔ)列表,以及這些術(shù)語(yǔ)的定義。除非Arm的含義與公認(rèn)的含義不同,否則Arm術(shù)語(yǔ)表不包含行業(yè)標(biāo)準(zhǔn)術(shù)語(yǔ)。
2023-08-08 06:10:47
以下小節(jié)描述ARM文檔中使用的約定。
術(shù)語(yǔ)表ARM術(shù)語(yǔ)表是ARM文檔中使用的術(shù)語(yǔ)列表,以及這些術(shù)語(yǔ)的定義。
ARM詞匯表不包含符合行業(yè)標(biāo)準(zhǔn)的術(shù)語(yǔ),除非ARM的含義與普遍接受的含義不同。
有關(guān)更多信息
2023-08-30 08:25:01
FPGA 英文術(shù)語(yǔ)表 解釋,對(duì)初學(xué)者很有裨益。
2013-06-14 23:28:25
GTK術(shù)語(yǔ)表Table 1. 術(shù)語(yǔ)表0 API Application Program Interface (應(yīng)用程序接口) 1 GDK GIMP Drawing Kit (GIMP 繪圖包) 2
2008-10-21 17:17:15
廣播操作(Broadcasting operation)一種用 numpy-style broadcasting 來(lái)保證tensor參數(shù)的形態(tài)兼容的操作。Devices一塊可以用來(lái)運(yùn)算并且擁有自己的地址空間的硬件,比如GPU和CPU。evalTensor 的一個(gè)方法,返回 Tensor 的值。觸發(fā)任意一個(gè)圖計(jì)算都需要計(jì)算出這個(gè)值。只能在一個(gè)已經(jīng)啟動(dòng)的會(huì)話的圖中才能調(diào)用該 Tensor 值。FeedTensorFlow 的一個(gè)概念:把一個(gè) Tensor 直接連接到一個(gè)會(huì)話圖表中的任意節(jié)點(diǎn)。feed 不是在構(gòu)建圖(graph)的時(shí)候創(chuàng)建,而是在觸發(fā)圖的執(zhí)行操作時(shí)去申請(qǐng)。一個(gè) feed 臨時(shí)替代一個(gè)帶有 Tensor 值的節(jié)點(diǎn)。把feed數(shù)據(jù)作為run( )方法和eval( )方法的參數(shù)來(lái)初始化運(yùn)算。方法運(yùn)行結(jié)束后,替換的 feed 就會(huì)消失,而最初的節(jié)點(diǎn)定義仍然還在。可以通過(guò)tf.placeholder( )把特定的節(jié)點(diǎn)指定為 feed 節(jié)點(diǎn)來(lái)創(chuàng)建它們。詳見(jiàn) Basic Usage .FetchTensorFlow中的一個(gè)概念:為了取回運(yùn)算操作的輸出結(jié)果。取回的申請(qǐng)發(fā)生在觸發(fā)執(zhí)行圖操作的時(shí)候,而不是發(fā)生在建立圖的時(shí)候。如果要取回一個(gè)或多個(gè)節(jié)點(diǎn)(node)的 Tensor 值,可以通過(guò)在 Session 對(duì)象上調(diào)用run( )方法并將待取回節(jié)點(diǎn)(node)的列表作為參數(shù)來(lái)執(zhí)行圖表(graph)。詳見(jiàn) Basic Usage 。Graph(圖)把運(yùn)算任務(wù)描述成一個(gè)直接的無(wú)環(huán)圖形(DAG),圖表中的節(jié)點(diǎn)(node)代表必須要實(shí)現(xiàn)的一些操作。圖中的邊代表數(shù)據(jù)或者可控的依賴。GratheDef 是系統(tǒng)中描述一個(gè)圖表的協(xié)議(api),它由一個(gè) NodeDefs 集合組成。一個(gè)GraphDef可以轉(zhuǎn)化成一個(gè)更容易操作的圖表對(duì)象。IndexedSlices(索引化切片)在 Python API 中,TensorFlow 僅僅在第一維上對(duì) Tensor 有所體現(xiàn)。如果一個(gè) Tensor 有k維,那么一個(gè) IndexedSlices 實(shí)例在邏輯上代表一個(gè)沿著這個(gè) Tensor 第一維的(k-1)維切片的集合。切片的索引被連續(xù)儲(chǔ)存在一個(gè)單獨(dú)的一維向量中,而對(duì)應(yīng)的切片則被拼接成一個(gè)單獨(dú)的k維 Tensor。如果 sparsity 不是受限于第一維空間,請(qǐng)用 SparseTensor。Node(節(jié)點(diǎn))圖中的一個(gè)元素。 把啟動(dòng)一個(gè)特定操作的方式稱為特定運(yùn)算圖表的一個(gè)節(jié)點(diǎn),包括任何用來(lái)配置這個(gè)操作的屬性的值。對(duì)于那些多形態(tài)的操作,這些屬性包括能完全決定這個(gè)節(jié)點(diǎn)(Node)簽名的充分信息。詳見(jiàn)graph.proto。操作(Op/operation)在 TensorFlow 的運(yùn)行時(shí)中,它是一種類似 add 或 matmul 或 concat的運(yùn)算。可以用 how to add an op 中的方法來(lái)向運(yùn)行時(shí)添加新的操作。在 Python 的API中,它是圖中的一個(gè)節(jié)點(diǎn)。在 tf.Operation 類中列舉出了這些操作。一個(gè)操作(Operation)的 type 屬性決定這個(gè)節(jié)點(diǎn)(node)的操作類型,比如add和matmul。Run在一個(gè)運(yùn)行的圖中執(zhí)行某種操作的行為。要求圖必須運(yùn)行在會(huì)話中。在 Python 的 API 中,它是 Session 類的一個(gè)方法 tf.Session.run 。可以通過(guò) Tensors 來(lái)訂閱或獲取run( )操作。在C++的API中,它是 tensorflow::Session 類 的一個(gè)方法。Session(會(huì)話)啟動(dòng)圖的第一步是創(chuàng)建一個(gè) Session 對(duì)象。Session 提供在圖中執(zhí)行操作的一些方法。在 Python API中,使用 tf.Session 。在 C++ 的API中, tensorflow::Session 是用來(lái)創(chuàng)建一個(gè)圖并運(yùn)行操作的類:ShapeTensor 的維度和它們的大小。在一個(gè)已經(jīng)啟動(dòng)的圖中,它表示流動(dòng)在節(jié)點(diǎn)(node)之間的 Tensor 的屬性。一些操作對(duì) shape 有比較強(qiáng)的要求,如果沒(méi)有 Shape 屬性則會(huì)報(bào)告錯(cuò)誤。在 Python API中,用創(chuàng)建圖的 API 來(lái)說(shuō)明 Tensor 的 Shape 屬性。Tensor 的Shape 屬性要么只有部分已知,要么全部未知。詳見(jiàn) tf.TensroShape在C++中,Shape 類用來(lái)表示 Tensor 的維度。 tensorflow::TensorShape 。SparseTensor在 Python API 中,它用來(lái)表示在 TensorFlow 中稀疏散落在任意地方的 Tensor 。SparseTensor 以字典-值格式來(lái)儲(chǔ)存那些沿著索引的非空值。換言之,m個(gè)非空值,就包含一個(gè)長(zhǎng)度為m的值向量和一個(gè)由m列索引(indices)組成的矩陣。為了提升效率,SparseTensor 需要將 indice(索引)按維度的增加來(lái)按序存儲(chǔ),比如行主序。如果稀疏值僅沿著第一維度,就用 IndexedSlices。TensorTensor是一種特定的多維數(shù)組。比如,一個(gè)浮點(diǎn)型的四維數(shù)組表示一小批由[batch,height,width,channel]組成的圖片。在一個(gè)運(yùn)行的圖(graph)中,它是一種流動(dòng)在節(jié)點(diǎn)(node)之間的數(shù)據(jù)。 在 Python 中,Tensor 類表示添加到圖的操作中的輸入和輸出,見(jiàn) tf.Tensor ,這樣的類不持有數(shù)據(jù)。在C++中,Tensor是方法 Session::Run( ) 的返回值,見(jiàn) tensorflow::Tensor ,這樣的 Tensor 持有數(shù)據(jù)。
2020-07-27 18:32:11
步進(jìn)電機(jī)驅(qū)動(dòng)的指針溫度表
2016-01-25 17:53:10
什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)有哪些特點(diǎn)?步進(jìn)電機(jī)有哪些優(yōu)缺點(diǎn)?步進(jìn)電機(jī)的工作原理是什么?
2021-06-18 09:59:06
、低速運(yùn)行平穩(wěn),低速運(yùn)行時(shí)不會(huì)產(chǎn)生類似于步進(jìn)電機(jī)的步進(jìn)運(yùn)行現(xiàn)象。適用于有高速響應(yīng)要求的場(chǎng)合;5、電機(jī)加減速的動(dòng)態(tài)相應(yīng)時(shí)間短,一般在幾十毫秒之內(nèi);6、發(fā)熱和噪音明顯降低。附:步進(jìn)電機(jī)動(dòng)態(tài)指標(biāo)及術(shù)語(yǔ):1、步
2018-08-28 15:36:30
今天給大家介紹的是一種內(nèi)置步進(jìn)表的集成微步進(jìn)電機(jī)驅(qū)動(dòng)器(HR8828),為打印機(jī)、掃描儀和其它自動(dòng)化設(shè)備提供解決方案。其設(shè)計(jì)為能使雙極步進(jìn)電機(jī)以全、半、1/4、1/8、1/16、1/32步進(jìn)模式工作
2021-02-25 06:23:49
示波器-術(shù)語(yǔ)表 A 采集模式-控制著怎樣從樣點(diǎn)中生成波形點(diǎn)的模式。采集模式的類型包括:采樣、峰值檢測(cè)、hires、包絡(luò)、平均和波形數(shù)據(jù)庫(kù)。 交流(AC)-電流和電壓的重復(fù)碼型隨時(shí)間變化的信號(hào)。也用來(lái)
2016-03-16 17:01:36
示波器-術(shù)語(yǔ)表-完結(jié)篇 T 時(shí)基–控制掃描定時(shí)的示波器電路。時(shí)基由秒/格控制功能設(shè)置。 軌跡–電子束運(yùn)動(dòng)在CRT上畫(huà)出的看得見(jiàn)的形狀。 瞬態(tài)信號(hào)–示波器測(cè)量的只發(fā)生一次的信號(hào)(也稱為單次
2016-03-30 17:04:26
示波器-術(shù)語(yǔ)表-三 G 增益精度–表示垂直系統(tǒng)衰減或放大信號(hào)的精度的指標(biāo),通常用百分比誤差表示。 千兆赫(GHz)-1,000,000,000赫茲,一種頻率單位。 毛刺–電路中間歇性的高速錯(cuò)誤。 格
2016-03-21 14:36:59
示波器-術(shù)語(yǔ)表-二 D 延時(shí)時(shí)基-一種帶有掃描的時(shí)基,可以相對(duì)于主時(shí)基掃描上預(yù)定的時(shí)間啟動(dòng)(或被觸發(fā)啟動(dòng))。您可以更清楚地看到事件,看到單純使用主時(shí)基掃描看不到的事件。 數(shù)字信號(hào)-電壓樣點(diǎn)使用離散
2016-03-18 15:44:03
示波器-術(shù)語(yǔ)表-四 N 納秒(ns)-一種時(shí)間單位,等于0.000000001秒。 噪聲–電路中不想要的電壓或電流。 O 示波器–用來(lái)查看電壓隨時(shí)間變化的儀器。示波器一詞源自英文單詞
2016-03-22 14:53:53
電子元器件基礎(chǔ)知識(shí)、電子專業(yè)英語(yǔ)術(shù)語(yǔ)、模擬術(shù)語(yǔ)表.doc
2016-11-25 10:13:31
所示步進(jìn)電機(jī)術(shù)語(yǔ)DC驅(qū)動(dòng)的同步電機(jī),無(wú)法直接用DC或者AC電源驅(qū)動(dòng),需要配備驅(qū)動(dòng)器才可以。此處與無(wú)刷直流電機(jī)相同,無(wú)刷DC電機(jī)需要使用驅(qū)動(dòng)電路,驅(qū)動(dòng)電路將電機(jī)定子與DC電源連接在一起工作。驅(qū)動(dòng)電...
2021-07-08 06:46:29
被用作定位控制和定速控制。 首先, 我們來(lái)看看連接步進(jìn)電機(jī)接線方法。 第二步, 連接步進(jìn)電機(jī)驅(qū)動(dòng)器的電源,如果在我們的步進(jìn)電機(jī)使用直流24V供電可以與表控共用一個(gè)開(kāi)關(guān)電源來(lái)供電。 第三步, 來(lái)看
2023-03-10 09:58:06
MCU怎么獲取這個(gè)步進(jìn)電機(jī)的細(xì)分表
2023-10-13 08:02:52
設(shè)計(jì)了一款利用步進(jìn)電機(jī)驅(qū)動(dòng)的指針式溫度表,該溫度表以AT89S52 單片機(jī)為核心,輔以步進(jìn)電機(jī)驅(qū)動(dòng)、數(shù)字溫度傳感器DS18B20 、L ED 顯示、報(bào)警器等硬件電路模塊組成,并對(duì)其軟、硬件設(shè)
2009-03-31 23:27:35 102
102 摘要:本術(shù)語(yǔ)表收集了運(yùn)算放大器的術(shù)語(yǔ)和規(guī)格參數(shù),為設(shè)計(jì)人員提供一個(gè)簡(jiǎn)便的參考指南。
2009-04-27 14:03:5423 minet步進(jìn)電機(jī)系統(tǒng)產(chǎn)品手冊(cè)二. 步進(jìn)電機(jī)原理及術(shù)語(yǔ)5三. 步進(jìn)電機(jī)驅(qū)動(dòng)器及細(xì)分控制原理 .. 9四. 步進(jìn)電機(jī)選型方法 .111.電機(jī)選型計(jì)算方法.. 112.本手冊(cè)常用2 相步
2010-01-09 10:29:0150 這份術(shù)語(yǔ)表匯總定義了TI公司Ddlta-Sigma技術(shù)、逐次逼近寄存器SAR)和流水線模數(shù)(A/D),并詳細(xì)說(shuō)明了它們的桂河和性能特點(diǎn).
2010-06-01 11:21:4821 這些術(shù)語(yǔ)支持Mentor Graphics PCB產(chǎn)品文檔在術(shù)語(yǔ)表當(dāng)中,一些是Mentor Graphics PCB產(chǎn)品獨(dú)有的,另外一些是PCB行業(yè)標(biāo)準(zhǔn)。
2010-11-24 15:56:300 1.什么是步進(jìn)電機(jī)? 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器
2006-04-16 23:19:051657 裝配、SMT相關(guān)術(shù)語(yǔ)表
1、Apertures 開(kāi)口,鋼版開(kāi)口指下游SMD焊墊印刷錫膏所用鋼版之開(kāi)口。通常此種不銹鋼版之厚度多在8mil 左右,現(xiàn)行主機(jī)板某些多
2008-08-03 12:03:061535 藍(lán)牙術(shù)語(yǔ)表
即時(shí)網(wǎng)絡(luò)一種通常以自發(fā)方式創(chuàng)建的網(wǎng)絡(luò)。即時(shí)網(wǎng)絡(luò)不要求架構(gòu),受時(shí)空限制。活動(dòng)從設(shè)備廣播 (ASB)ASB 邏輯傳輸可用于向微微網(wǎng)中的所有
2008-09-17 13:08:301812 電磁兼容(EMC)專業(yè)術(shù)語(yǔ)表
1.電磁環(huán)境 electromagnetic environment
存在于給定場(chǎng)所的所有電磁現(xiàn)象的
2009-03-23 17:43:25959 步進(jìn)電機(jī)的工作原理
以磁阻式步進(jìn)電機(jī)為例,介紹一下步進(jìn)電機(jī)的工作原理,圖1. 1是磁阻式步進(jìn)電機(jī)工作原理的示意圖。它的定子上有六個(gè)
2009-03-30 16:53:049099 
摘要:本術(shù)語(yǔ)表收集了運(yùn)算放大器的術(shù)語(yǔ)和規(guī)格參數(shù),為設(shè)計(jì)人員提供一個(gè)簡(jiǎn)便的參考指南。 本文介紹了在運(yùn)算放大器(op amp)數(shù)據(jù)資料的Electrical Characteristics表格中列出
2009-04-16 17:06:131259 
步進(jìn)電機(jī)的結(jié)構(gòu)
目前,我國(guó)使用的步進(jìn)電機(jī)多為反應(yīng)式步進(jìn)電機(jī)。在反應(yīng)式步進(jìn)電機(jī)中,有軸向分相和徑向分相兩種,如表5--1所述。
2009-05-06 23:37:4010316 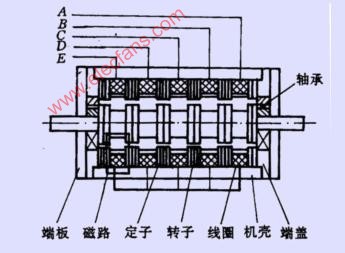
摘要:本術(shù)語(yǔ)表收集了運(yùn)算放大器的術(shù)語(yǔ)和規(guī)格參數(shù),為設(shè)計(jì)人員提供一個(gè)簡(jiǎn)便的參考指南。 本文介紹了在運(yùn)算放大器(op amp)數(shù)據(jù)資料的Electrical Characteristics表格中列出
2009-05-08 10:22:21504 
步進(jìn)電機(jī)是什么意思
什么是步進(jìn)電機(jī)步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接
2009-06-28 10:50:1510199 家用網(wǎng)絡(luò)設(shè)備術(shù)語(yǔ)表
客戶端(Client)指任何連接至服務(wù)器的計(jì)算機(jī)。
以太網(wǎng)(Ethernet) 一種網(wǎng)絡(luò)架構(gòu),通過(guò)特殊的電纜能夠把兩部或多部計(jì)算機(jī)連接到一
2009-08-05 10:30:48761 何為燃料電池和燃料電池術(shù)語(yǔ)表
簡(jiǎn)單地說(shuō),燃料電池(Fuel Cell)是一種將存在于燃料與氧化劑中的化學(xué)能直接轉(zhuǎn)化為電能的發(fā)電裝置。燃
2009-11-04 14:57:421521 步進(jìn)電機(jī)原理及術(shù)語(yǔ)
步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化設(shè)備中。步進(jìn)電機(jī)和普通電動(dòng)
2010-01-09 10:57:224937 
什么是步進(jìn)電機(jī)?
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)
2010-01-09 14:18:232173 步進(jìn)電機(jī)的應(yīng)用
(一)步進(jìn)電機(jī)的選擇步進(jìn)電機(jī)有步距角(涉及到相數(shù)
2010-01-09 15:11:264427 步進(jìn)電機(jī)細(xì)分控制原理
步進(jìn)電機(jī)控制已經(jīng)蘊(yùn)含了細(xì)分的原理。電機(jī)內(nèi)部磁場(chǎng)每旋轉(zhuǎn)一個(gè)圓周, 步進(jìn)電機(jī)前進(jìn)一整個(gè)步距角。若四相步
2010-01-10 22:40:219806 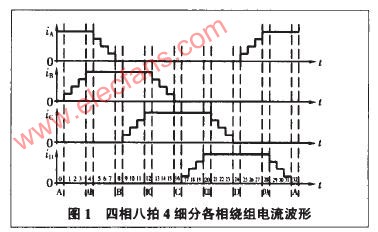
步進(jìn)電機(jī)和伺服電機(jī) 步進(jìn)電機(jī)是一種離散運(yùn)動(dòng)的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國(guó)內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電
2010-01-11 08:39:211407 步進(jìn)電機(jī)的參數(shù)
電機(jī)固有步距角:它表示控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖信號(hào),電機(jī)所轉(zhuǎn)動(dòng)的角度。
步進(jìn)電機(jī)
2010-02-25 17:40:236089 步進(jìn)電機(jī)簡(jiǎn)介
1.什么是步進(jìn)電機(jī)?
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)
2010-05-24 09:36:502090 步進(jìn)電機(jī)的保持轉(zhuǎn)矩,近似于傳統(tǒng)電機(jī)所稱的“功率”。當(dāng)然,有著本質(zhì)的區(qū)別。步進(jìn)電機(jī)的物理結(jié)構(gòu),完全不同于交流、直流電機(jī),步進(jìn)電機(jī)的輸出功率是可變的。
2010-06-12 08:19:261361 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0158 步進(jìn)電機(jī)控制,基于C51的步進(jìn)電機(jī)控制,快來(lái)下載學(xué)習(xí)吧
2016-01-13 14:12:0754 該步進(jìn)電機(jī)為一四相步進(jìn)電機(jī),采用單極性直流電源供電。只要對(duì)步進(jìn)電機(jī)的各相繞組按合適的時(shí)序通電,就能使步進(jìn)電機(jī)步進(jìn)轉(zhuǎn)動(dòng)。
2016-07-01 15:43:5984 電子元器件基礎(chǔ)知識(shí)、電子專業(yè)英語(yǔ)術(shù)語(yǔ)、模擬術(shù)語(yǔ)表
2016-12-16 15:41:000 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-06-11 11:34:2934038 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。
2018-07-10 01:23:002404 步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化設(shè)備中。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元件。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向
2018-04-25 10:59:1118051 本文開(kāi)始介紹了步進(jìn)電機(jī)的基本原理,其次介紹了步進(jìn)電機(jī)工作效率以及使步進(jìn)電機(jī)的效率最大化的方法,最后介紹了步進(jìn)電機(jī)選型的步驟與方法。
2018-04-25 14:06:015391 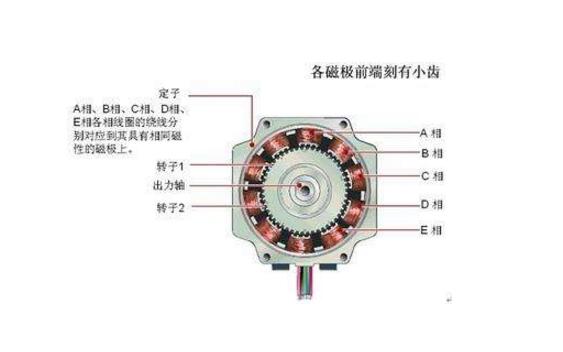
這個(gè)詞匯表列出并解釋用于描述TMS320系列中所有設(shè)備的功能的術(shù)語(yǔ)。有些條目只屬于特定的設(shè)備。該裝置在斜體化文本的每個(gè)條目的末尾表示。
2018-05-04 11:41:293 在相同電流且相同轉(zhuǎn)矩輸出的條件下,單極型步進(jìn)電機(jī)比雙極型步進(jìn)電機(jī)多一倍的線圈,成本更高,控制電路的結(jié)構(gòu)也不一樣,目前市場(chǎng)上流行的大多是雙極型步進(jìn)電機(jī)。
2018-07-17 18:34:0339735 
HR8828是一種內(nèi)置步進(jìn)表的集成微步進(jìn)電機(jī)驅(qū)動(dòng)器,為打印機(jī)、掃描儀和其它自動(dòng)化設(shè)備提供解決方案。其設(shè)計(jì)為能使雙極步進(jìn)電機(jī)以全、半、1/4、1/8、1/16、1/32步進(jìn)模式工作。步進(jìn)模式由邏輯輸入MODEx選擇。輸出驅(qū)動(dòng)能力達(dá)到38V和±3.5A。HR8828的衰減模式可編程。
2018-07-18 08:33:002403 步進(jìn)電機(jī)和伺服電機(jī)在工業(yè)傳動(dòng)控制領(lǐng)域都是重要的控制部件,應(yīng)用面廣泛。但是步進(jìn)電機(jī)和伺服電機(jī)有什么不同呢?
2020-12-14 21:28:356038 步進(jìn)電機(jī)從其結(jié)構(gòu)形式上可分為反應(yīng)式步進(jìn)電機(jī)、永磁式步進(jìn)電機(jī)、混合式步進(jìn)電機(jī)、單相步進(jìn)電機(jī)、平面步進(jìn)電機(jī)等多種類型。
2020-12-26 08:30:355608 步進(jìn)電機(jī)是電機(jī)中使用廣泛的一類,在電機(jī)市場(chǎng)步進(jìn)電機(jī)的運(yùn)用也是分類而行。步進(jìn)電機(jī)按照內(nèi)在的運(yùn)動(dòng)不同分為直線步進(jìn)電機(jī)。直線步進(jìn)電機(jī)的運(yùn)行原理與構(gòu)成是否與名字一樣是直線的呢?
2021-02-12 16:55:006923 分享一份人工智能術(shù)語(yǔ)表,快收藏!
2021-02-02 07:10:2416 之前講了溝通交流步進(jìn)電機(jī)的控制措施,大家都回去好好研究了嗎?可是,不要因?yàn)閷W(xué)到了什么而滿足。電機(jī)是一門非常大的大學(xué)問(wèn),即便分成伺服電機(jī)和步進(jìn)電機(jī),其中任何一種仍然有很大的學(xué)問(wèn)。
2021-06-29 15:50:572164 步進(jìn)電機(jī)外文名為Stepping motor,是一種將電脈沖信號(hào)轉(zhuǎn)換為相應(yīng)角位移或線位移的電動(dòng)機(jī),也是感應(yīng)電機(jī)的其中類型之一,步進(jìn)電機(jī)的工作原理是按照電磁學(xué)原理,將電能轉(zhuǎn)換為機(jī)械能。
2021-07-15 16:58:405468 步進(jìn)電機(jī)主要是依相數(shù)來(lái)做分類的,通常我們常見(jiàn)的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進(jìn)電機(jī)與三相步進(jìn)電機(jī)的區(qū)別: 電機(jī)的相數(shù) 是指電機(jī)內(nèi)部的線圈數(shù)不同,二相步進(jìn)電機(jī)電機(jī)內(nèi)部是由2個(gè)線圈
2021-07-20 14:32:1611555 。 我們?cè)O(shè)計(jì)此列表是為了揭開(kāi)安全專業(yè)人員在描述安全工具、威脅、流程和技術(shù)時(shí)使用的術(shù)語(yǔ)的神秘面紗。我們會(huì)定期更新它,希望它對(duì)于你來(lái)說(shuō)是有用的。 網(wǎng)絡(luò)安全術(shù)語(yǔ)表前兩期查看: 網(wǎng)絡(luò)安全術(shù)語(yǔ)列表(一) 網(wǎng)絡(luò)安全術(shù)語(yǔ)列表(
2022-12-01 17:49:284511 步進(jìn)電機(jī)是一種直接將電脈沖轉(zhuǎn)化為機(jī)械運(yùn)動(dòng)的機(jī)電裝置, 通過(guò)控制施加在電機(jī)線圈上的電脈沖順序、 頻率和數(shù)量, 可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)向、 速度和旋轉(zhuǎn)角度的控制。
2022-12-07 10:43:107902 在新開(kāi)始的“步進(jìn)電機(jī)”篇系列文章中,將介紹步進(jìn)電機(jī)的結(jié)構(gòu)、步進(jìn)電機(jī)的工作原理、步進(jìn)電機(jī)的特性和步進(jìn)電機(jī)的驅(qū)動(dòng)方法。什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。
2023-02-24 09:51:093540 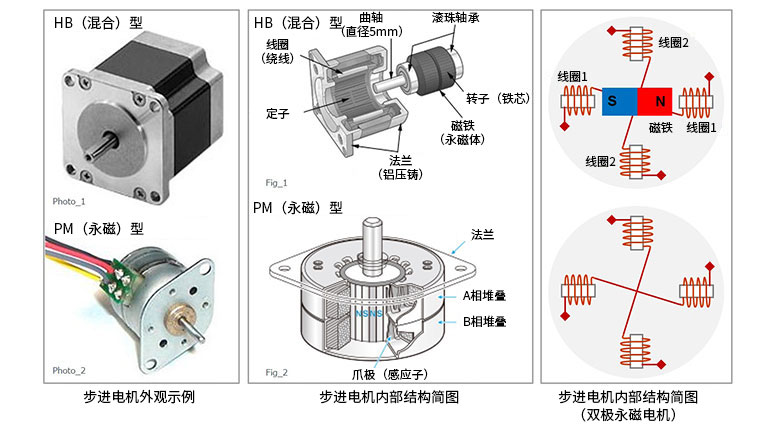
繼步進(jìn)電機(jī)的結(jié)構(gòu)之后,本文將介紹步進(jìn)電機(jī)的基本工作原理。步進(jìn)電機(jī)的基本工作原理(單相勵(lì)磁),下面使用下圖來(lái)介紹步進(jìn)電機(jī)的基本工作原理。這是上一篇“步進(jìn)電機(jī)的結(jié)構(gòu)”中給出的兩相雙極型線圈每一相(一組線圈)的勵(lì)磁示例。
2023-02-24 09:51:105867 
本文將介紹步進(jìn)電機(jī)的基本特性。步進(jìn)電機(jī)的基本特性:下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:103720 
到目前為止,我們已經(jīng)介紹了步進(jìn)電機(jī)的結(jié)構(gòu)和步進(jìn)電機(jī)的驅(qū)動(dòng)方法。本文在表格中簡(jiǎn)要匯總了步進(jìn)電機(jī)的特征及步進(jìn)電機(jī)應(yīng)用。
2023-02-24 09:51:122288 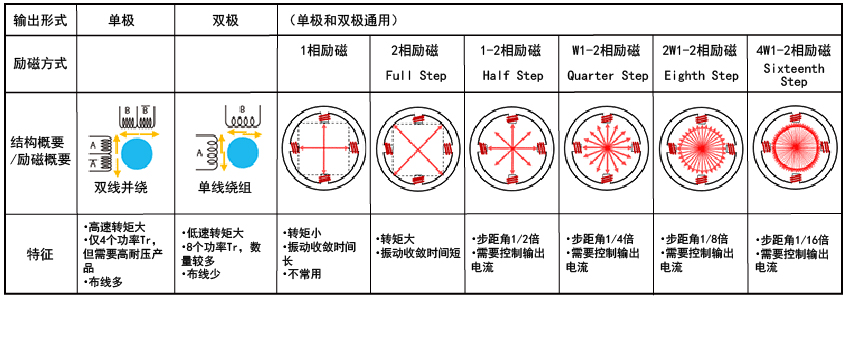
步進(jìn)電機(jī)的慣量選擇需要考慮到兩個(gè)方面:
電機(jī)本身的慣量:電機(jī)的慣量越大,電機(jī)的加速和減速所需要的時(shí)間就越長(zhǎng)。因此,在選擇步進(jìn)電機(jī)時(shí),需要根據(jù)應(yīng)用需求和控制系統(tǒng)的要求綜合考慮電機(jī)的慣量
2023-03-08 14:26:406758 步進(jìn)電機(jī)是一種特殊的電機(jī),可以通過(guò)輸入脈沖信號(hào)來(lái)控制它的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)通常由電機(jī)本體和驅(qū)動(dòng)電路組成,驅(qū)動(dòng)電路負(fù)責(zé)將輸入的脈沖信號(hào)轉(zhuǎn)換為電機(jī)的運(yùn)動(dòng)控制信號(hào)。
2023-03-08 14:33:335285 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無(wú)需使用位置傳感器僅通過(guò)開(kāi)環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:322782 
步進(jìn)電機(jī)相比普通直流電機(jī)來(lái)說(shuō)模型結(jié)構(gòu)方面更加復(fù)雜,比如步進(jìn)電機(jī)沒(méi)有設(shè)計(jì)直流電機(jī)用于切換電流方向的換向器,這一設(shè)
計(jì)致使步進(jìn)電機(jī)轉(zhuǎn)子無(wú)法同直流電機(jī)那樣接入直流電源立馬開(kāi)始運(yùn)動(dòng),這需要我們輪流控制步進(jìn)電機(jī)的多個(gè)線圈使磁場(chǎng)旋轉(zhuǎn)起
來(lái)從而驅(qū)動(dòng)電機(jī)轉(zhuǎn)子運(yùn)動(dòng)。所以控制步進(jìn)電機(jī)線圈磁場(chǎng)就是所謂的步進(jìn)電機(jī)驅(qū)動(dòng)。
2023-03-16 09:28:418 步進(jìn)電機(jī)原理介紹 一、步進(jìn)電機(jī)介紹 1.概念 什么是步進(jìn)電機(jī)? 優(yōu)點(diǎn) 缺點(diǎn)步進(jìn)電機(jī)的種類 反應(yīng)式VR 永磁式PM 混合式HB 二、步進(jìn)電機(jī)工作原理 物理知識(shí)重溫步進(jìn)電機(jī)結(jié)構(gòu) 勵(lì)磁順序 三、步進(jìn)電機(jī)
2023-03-21 14:32:2910 為增進(jìn)大家對(duì)步進(jìn)電機(jī)的認(rèn)識(shí),本文將對(duì)步進(jìn)電機(jī)的選型步驟以及方法予以介紹。 步進(jìn)電機(jī)是電機(jī)諸多類型中的一種,同時(shí)也是其中步進(jìn)電機(jī)應(yīng)用非常廣泛的一種。為增進(jìn)大家對(duì)步進(jìn)電機(jī)的認(rèn)識(shí),本文將對(duì)步進(jìn)電機(jī)的選型
2023-03-22 09:38:333 步進(jìn)電機(jī)和伺服電機(jī)哪個(gè)好,這個(gè)沒(méi)有絕對(duì)的答案,適合的才是最好的!下面從步進(jìn)電機(jī)和伺服電機(jī)各種的優(yōu)缺點(diǎn)、性能特點(diǎn)
進(jìn)行分析:
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:326 反應(yīng)式步進(jìn)電機(jī)和永磁式步進(jìn)電機(jī)都是常見(jiàn)的步進(jìn)電機(jī)類型,它們的區(qū)別主要在于其工作原理和結(jié)構(gòu)。
反應(yīng)式步進(jìn)電機(jī)是利用異步電機(jī)的原理,將定子繞組分為兩個(gè)或以上繞組,同時(shí)用電子器件(如晶閘管)控制
2023-03-27 16:11:143277 本文介紹是電池技術(shù)的專業(yè)術(shù)語(yǔ),方便行業(yè)朋友查閱
交流逆變器-一種產(chǎn)生正弦波輸出(調(diào)節(jié)和無(wú)中斷)。這個(gè)逆變器的主要元件是DC/AC轉(zhuǎn)換器、調(diào)節(jié)系統(tǒng)和輸出濾波器。
A/D轉(zhuǎn)換器(ADC)模擬
2023-07-03 17:02:481 圖中每個(gè)箭頭間隔是步進(jìn)電機(jī)的一個(gè)步進(jìn)角,每輸入一個(gè)脈沖,電機(jī)就會(huì)轉(zhuǎn)動(dòng)一個(gè)步進(jìn)角,不同的電機(jī)轉(zhuǎn)動(dòng)的步進(jìn)角是不一樣的。
2023-10-09 11:49:513642 
電子發(fā)燒友網(wǎng)站提供《什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)分哪幾種?.pdf》資料免費(fèi)下載
2023-11-28 14:21:291 隨著物聯(lián)網(wǎng)的不斷發(fā)展,電機(jī)控制技術(shù)得到了廣泛應(yīng)用,其中步進(jìn)電機(jī)作為一種常見(jiàn)的電機(jī)類型,在各行各業(yè)中得到了廣泛應(yīng)用。而作為一種強(qiáng)大、靈活的開(kāi)源電子平臺(tái),Arduino不僅能夠滿足普通電機(jī)的控制需求
2024-01-14 16:37:375250 步進(jìn)電機(jī)是一種電動(dòng)機(jī)的類型,它以準(zhǔn)確的固定角度步進(jìn)方式運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)內(nèi)部包含電磁鐵和旋轉(zhuǎn)式永磁轉(zhuǎn)子,通過(guò)電流的變化控制電磁鐵的磁場(chǎng)強(qiáng)度,從而產(chǎn)生扭矩,驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。步進(jìn)電機(jī)通常用于需要準(zhǔn)確位置控制
2024-01-22 10:15:591836 步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)是一種將電信號(hào)轉(zhuǎn)化為機(jī)械轉(zhuǎn)動(dòng)的電動(dòng)機(jī),其輸出轉(zhuǎn)角是按照電脈沖控制信號(hào)的變化而變化的。步進(jìn)電機(jī)的控制方法有幾種常見(jiàn)的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:182072 步進(jìn)電機(jī)原理及應(yīng)用 步進(jìn)電機(jī)是一種能夠按照一定步數(shù)進(jìn)行旋轉(zhuǎn)的電機(jī),其工作原理是利用電磁場(chǎng)的變化驅(qū)動(dòng)電機(jī)旋轉(zhuǎn)。步進(jìn)電機(jī)主要由定子和轉(zhuǎn)子組成,定子上有多個(gè)電磁線圈,而轉(zhuǎn)子上則有多個(gè)磁極。當(dāng)電磁線圈接通
2024-02-01 16:59:091712 什么是步進(jìn)電機(jī)的細(xì)分控制?步進(jìn)電機(jī)為什么要細(xì)分,如何細(xì)分? 步進(jìn)電機(jī)的細(xì)分控制是一種控制技術(shù),通過(guò)對(duì)電機(jī)驅(qū)動(dòng)信號(hào)的細(xì)分來(lái)實(shí)現(xiàn)提高電機(jī)精度和減小振動(dòng)、噪音的目的。步進(jìn)電機(jī)是一種常用的電機(jī)類型,它通過(guò)
2024-02-18 09:39:3210295 研控步進(jìn)電機(jī)接線是一個(gè)技術(shù)性很強(qiáng)的工作,需要對(duì)步進(jìn)電機(jī)的工作原理、接線方式以及控制方式有深入的了解。本文將詳細(xì)介紹研控步進(jìn)電機(jī)的接線方法,包括接線前的準(zhǔn)備工作、接線步驟、注意事項(xiàng)等,以幫助您更好
2024-06-12 09:14:152719 與所有電機(jī)一樣,步進(jìn)電機(jī)也有 定子和轉(zhuǎn)子 ,但與普通直流電機(jī)不同的是,定子由單獨(dú)的線圈組組成。線圈的數(shù)量會(huì)根據(jù)步進(jìn)電機(jī)的類型而有所不同,但現(xiàn)在只需了解,在步進(jìn)電機(jī)中,轉(zhuǎn)子由金屬極組成,每個(gè)極將被定子中的一組線圈吸引。下圖顯示了具有 8 個(gè)定子極和 6 個(gè)轉(zhuǎn)子極的步進(jìn)電機(jī)。
2024-06-20 17:10:393752 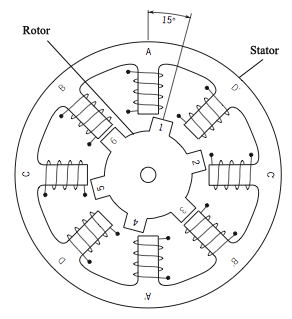
絲桿步進(jìn)電機(jī)和步進(jìn)電機(jī)的區(qū)別收集整理于網(wǎng)絡(luò),僅供學(xué)習(xí)參考。絲桿步進(jìn)電機(jī)和步進(jìn)電機(jī)在結(jié)構(gòu)和功能上存在明顯的區(qū)別。
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的裝置。通俗來(lái)說(shuō),當(dāng)一個(gè)脈沖信號(hào)發(fā)送到步進(jìn)電機(jī)
2024-08-23 10:09:051231 電子發(fā)燒友網(wǎng)站提供《RS-232術(shù)語(yǔ)表和選擇指南.pdf》資料免費(fèi)下載
2024-08-26 09:16:100 混合式步進(jìn)電機(jī)代碼:SM。
系列代碼:H、高性能二相步進(jìn)電機(jī);C、三相步進(jìn)電機(jī);E、五相步進(jìn)電機(jī);B、剎車步進(jìn)電機(jī);K:中空步進(jìn)電機(jī);F、防水步進(jìn)電機(jī);無(wú)、二相標(biāo)準(zhǔn)型步進(jìn)電機(jī)。
電機(jī)基座號(hào):08
2024-08-26 09:42:472283 
絲桿步進(jìn)電機(jī)和普通步進(jìn)電機(jī)有以下幾個(gè)主要區(qū)別:? 結(jié)構(gòu)不同: ? 步進(jìn)電機(jī):步進(jìn)電機(jī)是通過(guò)電磁感應(yīng)產(chǎn)生旋轉(zhuǎn)運(yùn)動(dòng)的電機(jī),它可以將電脈沖信號(hào)轉(zhuǎn)化為對(duì)應(yīng)的角位移,常用于定位控制。 ? 絲桿步進(jìn)電機(jī):絲桿
2024-09-02 13:38:061719 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī)。其工作原理是通過(guò)電子電路將直流電分為多相序控制電流,使用這種電流給步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作。每輸入一個(gè)電脈沖,步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱為“步距角”。通過(guò)控制脈沖數(shù)量和頻率,可以精確控制電機(jī)的旋轉(zhuǎn)角度和速度?。
2024-11-16 15:11:511557 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論