正常情況下,步進(jìn)電機(jī)轉(zhuǎn)過(guò)的總角度和輸入的脈沖數(shù)成正比;連續(xù)輸入一定頻率的脈沖時(shí),電動(dòng)機(jī)的轉(zhuǎn)速與輸入脈沖的頻率保持嚴(yán)格的對(duì)應(yīng)關(guān)系,不受電壓波動(dòng)和負(fù)載變化的影響。由于步進(jìn)電動(dòng)機(jī)能直接接收數(shù)字量的輸入,所以特別適合于微機(jī)控制。
2020-09-10 16:34:47 10384
10384 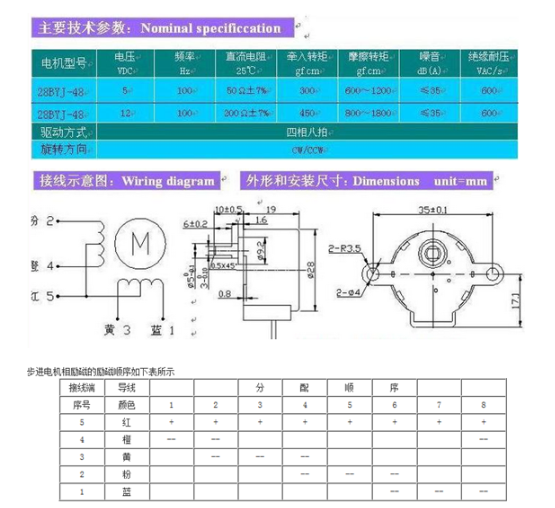
在工業(yè)控制領(lǐng)域,使用步進(jìn)電機(jī)作為運(yùn)動(dòng)控制的執(zhí)行器件是非常常見(jiàn)的運(yùn)用場(chǎng)景。其控制方式簡(jiǎn)單,電機(jī)成本低廉,可快速構(gòu)建一個(gè)高精度的定位控制系統(tǒng)。
2023-03-02 14:22:142335 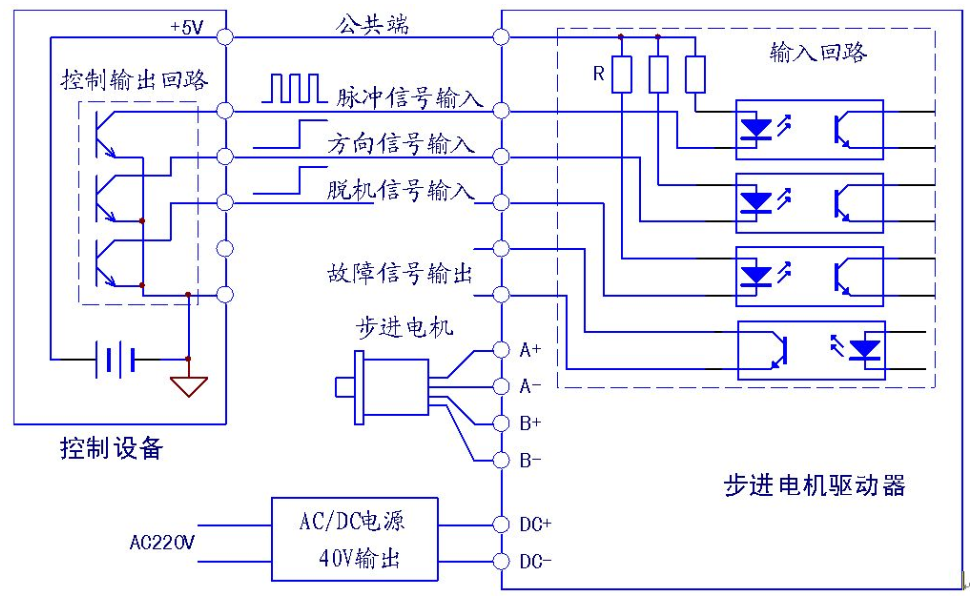
采用PLC實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。完成驅(qū)動(dòng)的接線(xiàn)和驅(qū)動(dòng)器的參數(shù)配置后,即可對(duì)PLC編程實(shí)現(xiàn)電機(jī)的運(yùn)轉(zhuǎn)。這里以西門(mén)子S-200smart PLC運(yùn)用舉例。
2023-03-02 14:22:355895 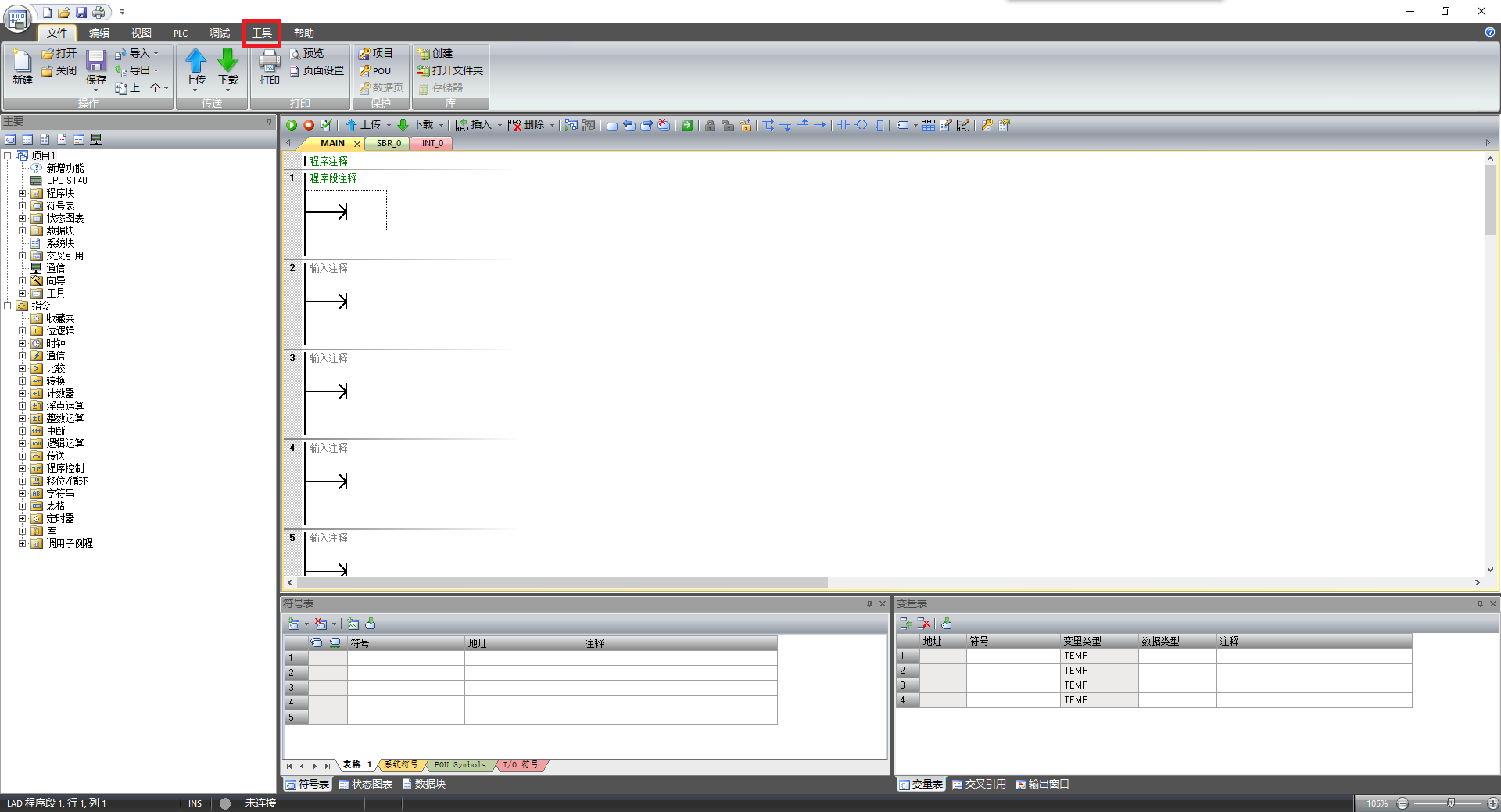
在本文中,講解了怎么用8051單片機(jī)控制步進(jìn)電機(jī)。步進(jìn)電機(jī)廣泛用于工業(yè)、醫(yī)療、消費(fèi)電子應(yīng)用。簡(jiǎn)而言之,它用于任何需要物體精確旋轉(zhuǎn)或定位的地方。
2023-07-07 11:02:023014 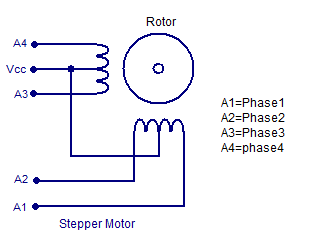
先來(lái)看一下硬件原理圖,可看到控制步進(jìn)電機(jī)的管腳分別為:GPIO6[2]、GPIO6[3]、GPIO6[4]和GPIO1[15]。使用的是一路四相五線(xiàn)步進(jìn)電機(jī),使用的電機(jī)驅(qū)動(dòng)芯片是L9110。
2023-08-04 14:45:418828 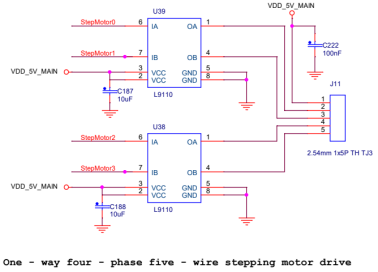
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:11
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:10
plc作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對(duì)步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。對(duì)于
2021-06-29 06:53:19
plc能否實(shí)現(xiàn)步進(jìn)電機(jī)的無(wú)級(jí)調(diào)速呢?如果可以能不能舉個(gè)例子或者哪一款plc能實(shí)現(xiàn)啊?
2023-03-23 15:32:18
plc軟件中控制步進(jìn)電機(jī)的脈沖高電平電壓值到底是多少,電壓值都一樣嗎?
2023-03-09 17:14:08
控制步進(jìn)電機(jī)替代PLC案例一、輸入按鍵控制電機(jī)正轉(zhuǎn)、反轉(zhuǎn)實(shí)現(xiàn)功能:要求輸入 X0 接一個(gè)按鈕開(kāi)關(guān)。開(kāi)關(guān)閉合一次電機(jī)以 300 轉(zhuǎn)/分 的速度正轉(zhuǎn) 10 圈,再以 200 轉(zhuǎn)/分 的速度反轉(zhuǎn) 10 圈
2021-07-08 08:05:55
直流電機(jī)分為哪幾種?什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)可以實(shí)現(xiàn)電機(jī)轉(zhuǎn)速和位置的精確控制嗎?
2021-09-14 06:10:07
步進(jìn)電機(jī)控制(PLC)目錄1、系統(tǒng)控制要求... 2一、控制要求... 2二、說(shuō)明... 2三、三相六拍步進(jìn)電機(jī)簡(jiǎn)介... 32、設(shè)計(jì)方案及流程圖... 4一、設(shè)計(jì)基礎(chǔ)... 4二、設(shè)計(jì)方案
2021-06-28 09:46:48
什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)有哪幾種?步進(jìn)電機(jī)是怎么控制的?
2021-10-08 07:28:20
過(guò)程,以保證實(shí)現(xiàn)步進(jìn)電機(jī)精密定位控制。加速和減速的原理是一樣的。以加速實(shí)例加以說(shuō)明:加速過(guò)程是由基礎(chǔ)頻率(低于步進(jìn)電機(jī)的直接起動(dòng)最高頻率)與跳變頻率(逐漸加快的頻率)組成加速曲線(xiàn)(降速過(guò)程反之)。跳變頻
2016-01-11 15:02:13
中,在步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)中,傳統(tǒng)的方法是用邏輯電路或單片機(jī)實(shí)現(xiàn)步進(jìn)電機(jī)控制,雖然此方法可行,但由于線(xiàn)路復(fù)雜而且制成后不易調(diào)整,因此存在一定的局限性。該系統(tǒng)采用虛擬儀器圖形化編程軟件I.abVIEW
2019-04-09 09:40:01
`怎么用LABVIEW控制步進(jìn)電機(jī)驅(qū)動(dòng)器實(shí)現(xiàn)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)向跪求大神指點(diǎn)`
2015-09-11 22:22:26
STM32控制步進(jìn)電機(jī)的怎么實(shí)現(xiàn)平滑調(diào)速
2023-10-23 06:39:41
三菱PLC如何控制步進(jìn)電機(jī)?
2021-10-09 07:04:42
FX2N系列PLC,型號(hào)需要注意的是必須是MT型號(hào),MR型號(hào)的PLC無(wú)法驅(qū)動(dòng)電機(jī);1.2 I/O口分配這個(gè)控制相對(duì)簡(jiǎn)單,直接見(jiàn)圖;在這里插入圖片描述1.3 驅(qū)動(dòng)器接線(xiàn)圖在這里插入圖片描述1.4 程序程序中可以通過(guò)修改D2數(shù)值,實(shí)現(xiàn)不同的轉(zhuǎn)速,需要注意數(shù)據(jù)范圍就好;在這里插入圖片描述2 其
2021-07-08 06:05:52
什么是步進(jìn)電機(jī),它是怎么控制的?步進(jìn)電機(jī)的種類(lèi)有哪些?怎么實(shí)現(xiàn)步進(jìn)電機(jī)的正轉(zhuǎn)反轉(zhuǎn)?
2021-10-20 06:18:48
如何輕松地實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制?
2021-10-15 06:02:04
本文介紹通過(guò)FPGA實(shí)現(xiàn)的步進(jìn)電機(jī)控制器。該控制器可以作為單片機(jī)或DSP的一個(gè)直接數(shù)字控制的外設(shè),只需向控制器的控制寄存器和分頻寄存器寫(xiě)入數(shù)據(jù),即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2021-04-29 06:05:44
我們學(xué)習(xí)PLC課程上機(jī)實(shí)驗(yàn)的時(shí)候,往往是用一個(gè)發(fā)光二極管代替步進(jìn)電機(jī),通過(guò)發(fā)光二極管的亮滅代表步進(jìn)電機(jī)正轉(zhuǎn)和反轉(zhuǎn),實(shí)際接線(xiàn)中往往出錯(cuò),今天就簡(jiǎn)單介紹一下;11.1 PLC型號(hào)的選擇我選擇的是三菱
2021-07-07 07:34:48
求大神幫忙 用plc實(shí)現(xiàn)步進(jìn)電機(jī)的往返運(yùn)行 要用限位開(kāi)關(guān)
2014-01-04 23:00:20
plc步進(jìn)電機(jī)原理圖
2019-10-12 08:08:10
步進(jìn)電機(jī)控制程序(PLC控制)
2008-10-10 14:35:02 65
65 本文介紹了步進(jìn)電機(jī)的工作原理和控制原則。
2009-04-02 14:27:4839 本文主要說(shuō)明四相八拍中步進(jìn)電機(jī)的PLC編程控制。
2009-04-02 16:12:0532 介紹了用一個(gè)開(kāi)關(guān)代替單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行手動(dòng)控制的原理電路,給出了步進(jìn)電機(jī)的開(kāi)關(guān)控制電路,以及用一個(gè)開(kāi)關(guān)控制數(shù)字電位器和加減計(jì)數(shù)器設(shè)置計(jì)數(shù)器輸出的兩種擴(kuò)展電路
2009-04-29 13:52:4323 介紹了步進(jìn)電機(jī)的工作原理,提出了步進(jìn)電機(jī)嵌入式設(shè)計(jì)方法,采用先進(jìn)的ARM 控制器,實(shí)現(xiàn)了軟件與硬件相結(jié)合的控制方法,用軟件代替脈沖分配器,達(dá)到了對(duì)步進(jìn)電機(jī)的最佳控制
2009-06-24 09:15:2444 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計(jì)方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對(duì)四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計(jì)總體方
2009-08-11 11:14:5089 本文介紹一種PLC 間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動(dòng)實(shí)現(xiàn),該方案簡(jiǎn)單、實(shí)用,適合用于作業(yè)與控制分離的場(chǎng)
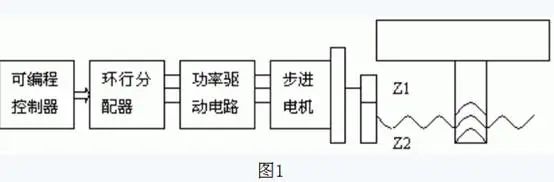
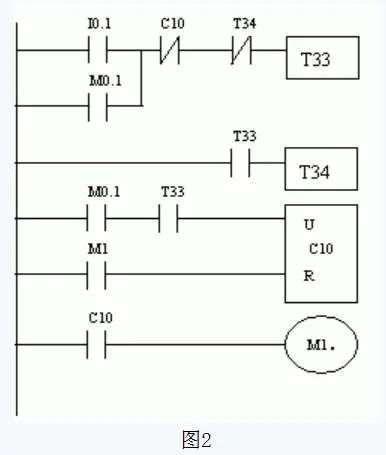
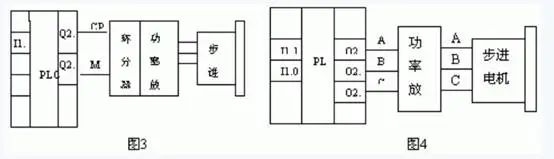
2009-08-15 09:28:4735 用MCP定時(shí)器控制步進(jìn)電機(jī):步進(jìn)電機(jī)簡(jiǎn)介1.1.1 步進(jìn)電機(jī)步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開(kāi)關(guān)器件,通過(guò)功
2009-09-19 11:36:3223 用GPIO做步進(jìn)電機(jī)控制:步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開(kāi)關(guān)器件,通過(guò)功率放大器使勵(lì)磁繞組按照順序輪流接通
2009-09-19 11:37:5869 用AT90S8515控制4線(xiàn)兩相步進(jìn)電機(jī)(C語(yǔ)言):現(xiàn)在四線(xiàn)兩相步進(jìn)電機(jī)應(yīng)用很普遍下圖是2 種5 伏步進(jìn)電機(jī)的原理圖及接線(xiàn)圖用ULN2803A 驅(qū)動(dòng)的步進(jìn)電機(jī)電流應(yīng)小于400mA;用晶體三極管驅(qū)動(dòng)的步進(jìn)
2010-01-09 13:40:57200 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL 為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA 內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速
2010-01-18 14:52:31314 詳述了用PLC的高速計(jì)數(shù)和高速脈沖輸出指令PTO/PWM基本指令實(shí)現(xiàn)自動(dòng)運(yùn)動(dòng)定位的控制。系統(tǒng)采用PLC的PTO輸出直接驅(qū)動(dòng)步進(jìn)電機(jī)驅(qū)動(dòng)器、增量型旋轉(zhuǎn)編碼器和導(dǎo)螺桿機(jī)構(gòu)形成閉環(huán)控制系
2010-02-11 14:37:20104 詳述了用PLC的高速計(jì)數(shù)和高速脈沖輸出指令PTO/PWM基本指令實(shí)現(xiàn)自動(dòng)運(yùn)動(dòng)定位的控制。系統(tǒng)采用PLC的PTO輸出直接驅(qū)動(dòng)步進(jìn)電機(jī)驅(qū)動(dòng)器、增量型旋轉(zhuǎn)編碼器和導(dǎo)螺桿機(jī)構(gòu)形成閉環(huán)控制系
2010-07-13 16:10:3738 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速、減
2010-07-13 16:14:4045 本文介紹一種PLC間通信的步進(jìn)電機(jī)遠(yuǎn)程閉環(huán)控制的方案,主要介紹了系統(tǒng)構(gòu)成、主站和從站的程序編制,步進(jìn)電機(jī)的驅(qū)動(dòng)實(shí)現(xiàn),該方案簡(jiǎn)單、實(shí)用,適合用于作業(yè)與控制分離的場(chǎng)合
2010-07-20 15:12:4235 提出了一種基于PLC的四相步進(jìn)電機(jī)控制的方法,介紹了控制系統(tǒng)的設(shè)計(jì)方案及其軟硬件的實(shí)現(xiàn)方法。實(shí)現(xiàn)對(duì)四相步進(jìn)電機(jī)的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計(jì)總體方案
2010-07-21 09:31:1762 plc步進(jìn)電機(jī)原理圖
PLC選用日本松下FP0 PLC,共8點(diǎn)輸入(X0~X7),8點(diǎn)輸出(Y0~Y7),主要控制主電機(jī)Motor1
2008-05-22 11:49:5710778 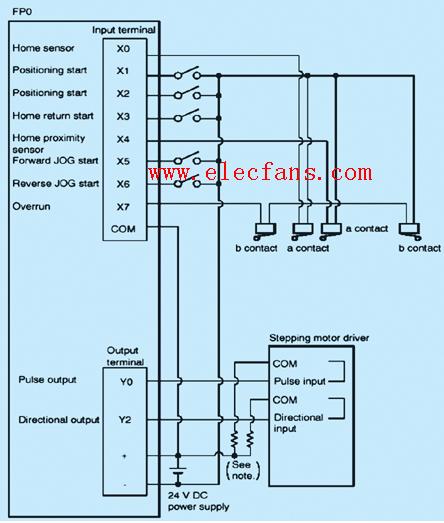
實(shí)驗(yàn) 步進(jìn)電機(jī)自動(dòng)控制一、實(shí)驗(yàn)?zāi)康?nbsp; 1.掌握用PLC控制步進(jìn)電機(jī)的方法。
2008-09-30 13:16:041687 
步進(jìn)電機(jī)的PLC控制方法
一、引言 隨著微電子技術(shù)和計(jì)算機(jī)技術(shù)的發(fā)展,可編程序控制器有了突飛猛進(jìn)的發(fā)展,其功能已遠(yuǎn)遠(yuǎn)超出了邏輯
2008-10-09 15:14:458225 
plc控制步進(jìn)電機(jī)程序
·
2008-10-09 15:20:1812771 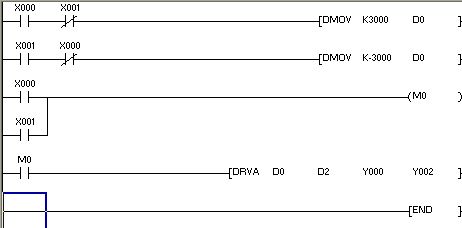
適用PLC使用的步進(jìn)電機(jī)控制驅(qū)動(dòng)器
本文介紹了一種新型步進(jìn)電機(jī)控制驅(qū)動(dòng)器。該驅(qū)動(dòng)器充分利用了單片機(jī)軟件控制靈活和PLC的ΔC門(mén)控制
2009-06-18 14:34:402998 
步進(jìn)電機(jī)的PLC直接控制
步進(jìn)電機(jī)的可編程控制器直接控制,可使組合機(jī)床自動(dòng)生產(chǎn)線(xiàn)控制系統(tǒng)的成本顯著下降。文章介紹了用PLC控制步
2009-06-19 14:09:033275 
介紹一種用寄存器實(shí)現(xiàn)電機(jī)速度控制的方法該方法占用空間小控制靈活能方便地實(shí)現(xiàn)電機(jī)速度控制!
2012-04-06 15:24:3214 plc控制步進(jìn)電機(jī)直接控制
2012-06-20 17:17:515900 PLC的步進(jìn)電機(jī)控制系統(tǒng) 復(fù)雜的控制系統(tǒng)不僅I/O點(diǎn)數(shù)多,功能表圖也相當(dāng)復(fù)雜,除包括前面介紹的功能表圖的基本結(jié)構(gòu)外,還包括跳步與循環(huán)控制,而且系統(tǒng)往往還要求設(shè)置多種工作方式。
2016-08-24 16:52:028 海為S系列PLC有一路的高速脈沖輸出,一般情況下只能控制一臺(tái)步進(jìn)電機(jī)進(jìn)行工作。但是為了充分利用資源節(jié)約成本,可以利用正轉(zhuǎn)/反轉(zhuǎn)輸出脈沖的模式再增加兩個(gè)輸出端來(lái)控制兩臺(tái)步進(jìn)電機(jī)進(jìn)行工作。正轉(zhuǎn)脈沖和反轉(zhuǎn)
2017-10-09 09:06:143 步進(jìn)電機(jī)是一種將脈沖信號(hào)變換成角位移的數(shù)字電磁執(zhí)行裝置。步進(jìn)電機(jī)的角位移與輸入脈沖個(gè)數(shù)成正比,其轉(zhuǎn)速與脈沖頻率成正比,其轉(zhuǎn)向與脈沖分配到步進(jìn)電機(jī)的各相繞組的相序有關(guān)。由于步進(jìn)電機(jī)的轉(zhuǎn)角、轉(zhuǎn)速和轉(zhuǎn)向均可采用數(shù)字量(脈沖)控制,故步進(jìn)電機(jī)廣泛應(yīng)用于數(shù)字伺服領(lǐng)域。
2017-10-13 14:46:5120 ,許多PLC 都內(nèi)置了脈沖輸出功能,并設(shè)置了相應(yīng)的控制指令,可以很好地對(duì)步進(jìn)電機(jī)進(jìn)行控制,實(shí)現(xiàn)和其它設(shè)備的通信等。本文用SIEMENS 公司CPU226 晶體管輸出型PLC控制步進(jìn)電機(jī)。
2017-10-13 15:42:0716 本文主要闡述了五相十拍步進(jìn)電動(dòng)機(jī)結(jié)構(gòu)原理,以及對(duì)步進(jìn)電機(jī)的調(diào)速和正反轉(zhuǎn)的研究。采用 PLC 基本邏輯指令和常用指令的方法對(duì)步進(jìn)電機(jī)調(diào)速正反轉(zhuǎn)控制。步進(jìn)電機(jī)是一種將脈沖信號(hào)轉(zhuǎn)換成直線(xiàn)位移或角位移的執(zhí)行
2017-10-13 16:36:2717 及文化娛樂(lè)等各行各業(yè),隨著PLC性能價(jià)格比的不斷提高,其應(yīng)用領(lǐng)域不斷擴(kuò)大。本文主是根據(jù)設(shè)計(jì)要求,在了解步進(jìn)電機(jī)原理的情況下,結(jié)合實(shí)際應(yīng)用將PLC與步進(jìn)電機(jī)有效的結(jié)合起來(lái),達(dá)到控制目的。 步進(jìn)電機(jī)低速時(shí)可以正常運(yùn)轉(zhuǎn),但若高于
2017-10-13 17:12:3216 在紡織機(jī)的送經(jīng)裝置中。 用可編程控制器《PLC)聲生各種步進(jìn)脈沖驅(qū)動(dòng)步進(jìn)電帆去達(dá)到各種控制、測(cè)試目的己展見(jiàn)不蟬了。步進(jìn)電機(jī)由于旦有轉(zhuǎn)子慣量低、定位精度高、無(wú)累積誤差、控制衙草等特點(diǎn),戚了工控的主要執(zhí)行元件之一,尤真
2017-11-08 16:12:407 步進(jìn)電機(jī)是靠接收脈沖電流來(lái)實(shí)現(xiàn)速度、位置和方向的控制,脈沖的多少?zèng)Q定步進(jìn)電機(jī)的位置,脈沖的速率決定電機(jī)的轉(zhuǎn)速,脈沖的方向決定電機(jī)的轉(zhuǎn)向。現(xiàn)在大多數(shù)步進(jìn)電機(jī)的控制方式就是用plc發(fā)脈沖給驅(qū)動(dòng)器,驅(qū)動(dòng)器
2017-12-14 15:46:1238003 步進(jìn)電機(jī)由于體積精巧、價(jià)格低廉、運(yùn)行穩(wěn)定,在低端行業(yè)應(yīng)用廣泛,步進(jìn)電機(jī)運(yùn)動(dòng)控制實(shí)現(xiàn)全閉環(huán),是工控行業(yè)的一大難題。主要問(wèn)題有兩個(gè),原點(diǎn)的不確定性和失步,目前,采用高速光電開(kāi)關(guān)作為步進(jìn)系統(tǒng)的原點(diǎn),這個(gè)誤差在毫米級(jí),所以在精確控制領(lǐng)域
2018-03-12 14:32:3125729 
和計(jì)算機(jī)技術(shù)的發(fā)展,步進(jìn)電機(jī)的需求量與日俱增,在各個(gè)行業(yè)的控制領(lǐng)域都將有廣泛應(yīng)用。PLC 作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC 對(duì)步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2018-10-08 14:44:005891 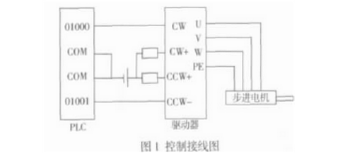
對(duì)步進(jìn)電機(jī)的控制是經(jīng)濟(jì)型數(shù)控系統(tǒng)開(kāi)發(fā)時(shí)的一項(xiàng)重要內(nèi)容,其中對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)過(guò)程中的升 降速控制是重點(diǎn)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€(xiàn)位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。
2018-10-26 09:23:0019539 本文檔的主要內(nèi)容詳細(xì)介紹的是S7-200、變頻器與觸摸屏的應(yīng)用PLC與步進(jìn)電機(jī)的運(yùn)動(dòng)控制資料說(shuō)明。一、運(yùn)動(dòng)小車(chē)裝置介紹二、運(yùn)動(dòng)控制與步進(jìn)電機(jī) 三、光柵尺四、基于PLC與步進(jìn)電機(jī)的小車(chē)自動(dòng)往返控制五、基于PLC與步進(jìn)電機(jī)的位置閉環(huán)控制
2018-10-25 08:00:0045 步進(jìn)電機(jī)是一種很常見(jiàn)的動(dòng)力元件,步進(jìn)電機(jī)可以很方便的由控制系統(tǒng)控制其速度與轉(zhuǎn)動(dòng)方向。那么使用PLC如何控制步進(jìn)的速度與方向呢。
2020-02-16 22:37:5823570 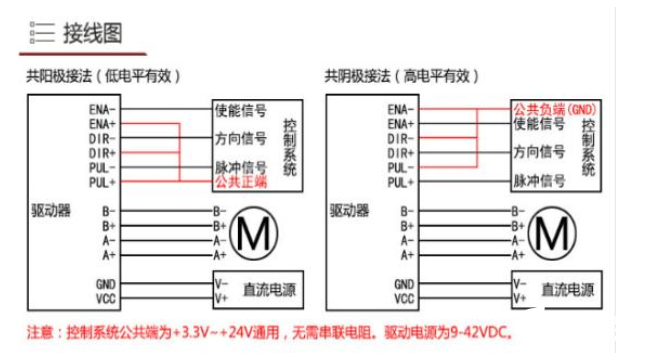
簡(jiǎn)要介紹利用 PLC 控制步進(jìn)電機(jī)對(duì)執(zhí)行元件進(jìn)行自動(dòng)分度, 重點(diǎn)介紹一種 PLC 控制步進(jìn)電機(jī)的分度算法, 可實(shí)現(xiàn) 360°內(nèi)轉(zhuǎn)角誤差為 0, 保證了精確分度, 并給出分度算法梯形圖。
2020-04-28 08:00:001 本文檔的主要內(nèi)容詳細(xì)介紹的是步進(jìn)電機(jī)控制PLC的程序免費(fèi)下載。
2020-05-26 08:00:0019 plc作為一種工業(yè)操控核算機(jī),具有模塊化構(gòu)造、裝備活絡(luò)、高速的處理速度、準(zhǔn)確的數(shù)據(jù)處理才調(diào)、PLC對(duì)步進(jìn)電機(jī)也具有超卓的操控才調(diào),運(yùn)用其高速脈沖輸出功用或運(yùn)動(dòng)操控功用,即可結(jié)束對(duì)步進(jìn)電機(jī)的操控。
2020-09-26 11:09:037531 Arduino是一款便捷靈活、方便上手的開(kāi)源電子原型平臺(tái)。與常見(jiàn)的 DSP PLC ARN51單片機(jī)不同Arduino具有編程簡(jiǎn)單,操作方便,價(jià)格便宜等諸多優(yōu)點(diǎn)。本文介紹基于 Arduino t的進(jìn)步電機(jī)系統(tǒng),通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)步進(jìn)電機(jī),可實(shí)現(xiàn)定位控制。結(jié)果表明該系統(tǒng)操作簡(jiǎn)單,性能可靠。
2020-12-07 08:00:004 良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。 眾所周知,步進(jìn)電機(jī)是一種低轉(zhuǎn)子慣量、高定位精度、小誤差、控制簡(jiǎn)單的電機(jī),是運(yùn)動(dòng)控制領(lǐng)域的主要執(zhí)行元件之一。而PLC作為一種工業(yè)控制計(jì)算機(jī),
2021-01-12 16:14:284804 ,極大地減少了外圍元件的使用。同時(shí),采用V HDL 語(yǔ)言控制可以根據(jù)步進(jìn)電機(jī)的不同,改變模塊程序的參數(shù)就可以實(shí)現(xiàn)不同型號(hào)步進(jìn)電機(jī)的控制,有利于步進(jìn)電機(jī)的廣泛應(yīng)用。
2021-02-05 11:37:0027 本應(yīng)用筆記介紹了如何使用dsPIC33F電機(jī)控制系列DSC實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)控制。
2021-04-02 14:47:2213 基于PLC步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)說(shuō)明。
2021-05-19 10:01:07109 用PWM實(shí)現(xiàn)儀表步進(jìn)電機(jī)的微步細(xì)分驅(qū)動(dòng) 儀表步進(jìn)電機(jī)應(yīng)用較早的是瑞士SWITEC公司的XC5系列步進(jìn)電機(jī),隨著國(guó)產(chǎn)同類(lèi)產(chǎn)品的成熟,小型儀表步進(jìn)電機(jī)應(yīng)用更加廣泛。目前,國(guó)內(nèi)外常用的幾種儀表步進(jìn)
2021-12-06 11:21:0924 步進(jìn)電機(jī)是一種直接將電脈沖轉(zhuǎn)化為機(jī)械運(yùn)動(dòng)的機(jī)電裝置, 通過(guò)控制施加在電機(jī)線(xiàn)圈上的電脈沖順序、 頻率和數(shù)量, 可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)向、 速度和旋轉(zhuǎn)角度的控制。
2022-12-07 10:43:107902 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱(chēng)為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無(wú)需使用位置傳感器僅通過(guò)開(kāi)環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:322782 
利用單片機(jī)實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制,編寫(xiě)程序,用四路 I/O口實(shí)現(xiàn)環(huán)形脈沖的分配,控制步進(jìn)電機(jī)按固定方向連續(xù)轉(zhuǎn)
動(dòng)。同時(shí),要求按下“Positive(正轉(zhuǎn))”按鍵時(shí),控制步進(jìn)電機(jī)正轉(zhuǎn);按下
2023-03-21 15:25:244 自動(dòng)停止 4. 高分要求:正反轉(zhuǎn)/轉(zhuǎn)速可以任意組合
步進(jìn)電機(jī)是電流在線(xiàn)圈中按順序切換而使電機(jī)轉(zhuǎn)軸作步矩式轉(zhuǎn)的電機(jī) 。切換是由輸入驅(qū)動(dòng)的脈沖信號(hào)來(lái)完成的,每給驅(qū)動(dòng)電路一個(gè)脈沖,電機(jī)轉(zhuǎn)軸就按要求旋轉(zhuǎn)一定的角度。故這種電機(jī)可以用輸入的脈 沖數(shù)來(lái)控制電機(jī)的轉(zhuǎn)角,
2023-03-22 11:19:422 步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€(xiàn)位移的開(kāi)環(huán)控制元件。
步進(jìn)電機(jī)收到一個(gè)脈沖,步進(jìn)電機(jī)走一個(gè)步距角。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖數(shù)
2023-03-22 10:42:591 PLC作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對(duì)步進(jìn)電機(jī)也具有
良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制
2023-03-22 11:06:591 本文以西門(mén)子S7-1200系列PLC、步進(jìn)電機(jī)及西門(mén)子KTP700PN觸摸屏為研究對(duì)象,步進(jìn)電機(jī)控制為例,利用TIAPortal
V15.1編程軟件進(jìn)行硬件組態(tài)和軟件編程,實(shí)現(xiàn)了PLC以及觸摸屏
2023-03-22 10:05:5919 我們學(xué)習(xí)PLC課程上機(jī)實(shí)驗(yàn)的時(shí)候,往往是用一個(gè)發(fā)光二極管代替步進(jìn)電機(jī),通過(guò)發(fā)光二極管的亮滅代表步進(jìn)電機(jī)正轉(zhuǎn)和反轉(zhuǎn),實(shí)際接線(xiàn)中往往出錯(cuò),今天就簡(jiǎn)單介紹一下; 11.1 PLC型號(hào)的選擇我選擇的是三菱
2023-03-22 09:53:102 需要準(zhǔn)備設(shè)備: DC類(lèi)型的PLC、步進(jìn)電機(jī)、控制卡、24v開(kāi)關(guān)電源、電線(xiàn)若干
步進(jìn)電機(jī)連接步進(jìn)控制卡:首先檢查電機(jī)的AB項(xiàng),將電機(jī)中的隨意兩對(duì)線(xiàn)進(jìn)行連接,并用力旋轉(zhuǎn)電機(jī)軸,如果不能旋轉(zhuǎn)則表 示為
2023-03-22 09:59:260 角位移量以達(dá)到準(zhǔn)確定位的目的;同時(shí)
也可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)作為一種控制用的特種電機(jī),因其沒(méi)有
積累誤差(精度為100%)而廣泛應(yīng)用于各種開(kāi)環(huán)控制。
2023-03-23 14:19:271 角位移量以達(dá)到準(zhǔn)確定位的目的;同
時(shí)也可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)作為一種控制用的特種電機(jī),因其沒(méi)
有積累誤差(精度為100%)而廣泛應(yīng)用于各種開(kāi)環(huán)控制。
2023-03-23 10:34:222 嚴(yán)格來(lái)講,編碼器只會(huì)告訴你改如何定位,要如何執(zhí)行,是需要靠數(shù)控系統(tǒng)(或者PLC之類(lèi)控制器)控制伺服或者步進(jìn)電機(jī)來(lái)實(shí)現(xiàn)定位的,編碼器好比人的眼睛,知道電機(jī)軸或者負(fù)載處于當(dāng)前某個(gè)位置,工業(yè)上用的一般是光電類(lèi)型編碼器,下邊簡(jiǎn)單說(shuō)明一下。
2023-04-07 10:16:393142 plc作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對(duì)步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2023-08-02 10:05:542073 plc作為一種工業(yè)控制計(jì)算機(jī),具有模塊化結(jié)構(gòu)、配置靈活、高速的處理速度、精確的數(shù)據(jù)處理能力、PLC對(duì)步進(jìn)電機(jī)也具有良好的控制能力,利用其高速脈沖輸出功能或運(yùn)動(dòng)控制功能,即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。對(duì)于
2023-08-07 08:09:363137 
步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來(lái)驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門(mén)子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-08-25 11:15:102633 
步進(jìn)電機(jī)驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)從一個(gè)位置向另一個(gè)位置移動(dòng)時(shí),要經(jīng)歷升速、恒速和減速過(guò)程。當(dāng)步進(jìn)電機(jī)的運(yùn)行頻率低于其本身起動(dòng)頻率時(shí),可以用運(yùn)行頻率直接起動(dòng)并 以此頻率運(yùn)行,需要停止時(shí),可從運(yùn)行頻率直接降到零速。
2023-08-28 11:30:282647 電子發(fā)燒友網(wǎng)站提供《步進(jìn)電機(jī)控制器的FPGA的實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-07 16:29:171 步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng),這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器,它是把控制系統(tǒng)發(fā)出的脈沖信號(hào),加以放大以驅(qū)動(dòng)步進(jìn)電機(jī)。步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比,控制步進(jìn)電機(jī)脈沖信號(hào)的頻率,可以對(duì)電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個(gè)數(shù),可以對(duì)電機(jī)精確定位。
2023-10-19 10:59:421401 
基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門(mén)子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線(xiàn)及軟件設(shè)計(jì)。通過(guò)測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:165365 
于控制精度要求較高的場(chǎng)合,如打印機(jī)、數(shù)碼相機(jī)等。而對(duì)于步進(jìn)電機(jī)的控制,一般有開(kāi)環(huán)控制和閉環(huán)控制兩種方法。 開(kāi)環(huán)控制基本概念: 開(kāi)環(huán)控制(Open Loop Control)就是將電腦或其他控制器輸出的控制信號(hào)直接作用于電機(jī),以期望實(shí)現(xiàn)所需的控
2023-10-24 11:49:193131 步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來(lái)驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門(mén)子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-10-30 11:30:524410 
步進(jìn)電機(jī)是一種在控制系統(tǒng)中常見(jiàn)的電機(jī)類(lèi)型,它以步進(jìn)角度為單位進(jìn)行旋轉(zhuǎn),并且可以精確控制位置和速度。在許多應(yīng)用領(lǐng)域,如精密儀器、印刷設(shè)備和醫(yī)療設(shè)備中,步進(jìn)電機(jī)都得到廣泛使用。 為了實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的精確
2024-01-19 10:50:225085 步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)是一種將電信號(hào)轉(zhuǎn)化為機(jī)械轉(zhuǎn)動(dòng)的電動(dòng)機(jī),其輸出轉(zhuǎn)角是按照電脈沖控制信號(hào)的變化而變化的。步進(jìn)電機(jī)的控制方法有幾種常見(jiàn)的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:182072 什么是步進(jìn)電機(jī)的細(xì)分控制?步進(jìn)電機(jī)為什么要細(xì)分,如何細(xì)分? 步進(jìn)電機(jī)的細(xì)分控制是一種控制技術(shù),通過(guò)對(duì)電機(jī)驅(qū)動(dòng)信號(hào)的細(xì)分來(lái)實(shí)現(xiàn)提高電機(jī)精度和減小振動(dòng)、噪音的目的。步進(jìn)電機(jī)是一種常用的電機(jī)類(lèi)型,它通過(guò)
2024-02-18 09:39:3210295 步進(jìn)電機(jī)控制器是一種專(zhuān)門(mén)用于控制步進(jìn)電機(jī)的設(shè)備,它通過(guò)發(fā)出脈沖信號(hào)來(lái)驅(qū)動(dòng)步進(jìn)電機(jī),實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)動(dòng)角度、速度和方向的精確控制。步進(jìn)電機(jī)控制器通常包括一個(gè)脈沖信號(hào)發(fā)生器、一個(gè)驅(qū)動(dòng)器和一個(gè)控制板。脈沖
2024-06-24 17:12:236470 
步進(jìn)電機(jī)伺服控制系統(tǒng)是一種精密的電機(jī)控制系統(tǒng),它通過(guò)精確控制電機(jī)的步進(jìn)角度來(lái)實(shí)現(xiàn)對(duì)機(jī)械運(yùn)動(dòng)的精確控制。這種系統(tǒng)廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、精密儀器等領(lǐng)域。 步進(jìn)電機(jī)伺服控制系統(tǒng)的作用 步進(jìn)電機(jī)伺服
2024-09-04 09:46:121709 是一種智能控制方法,它可以根據(jù)系統(tǒng)參數(shù)的變化和外部干擾自動(dòng)調(diào)整控制策略,以實(shí)現(xiàn)對(duì)系統(tǒng)的穩(wěn)定和精確控制。在步進(jìn)電機(jī)的自適應(yīng)控制中,主要涉及到以下幾個(gè)方面: 系統(tǒng)建模:首先需要對(duì)步進(jìn)電機(jī)的動(dòng)態(tài)特性進(jìn)行建模,包括電機(jī)的
2024-10-23 10:04:382253 電機(jī)能夠實(shí)現(xiàn)高精度的位置控制和速度控制。本文將詳細(xì)介紹步進(jìn)電機(jī)的控制實(shí)現(xiàn)方法,包括基本的控制原理、常見(jiàn)的控制策略以及實(shí)際應(yīng)用中的注意事項(xiàng)。 ? ? ? 一、步進(jìn)電機(jī)的基本控制原理 ? ? ? 步進(jìn)電機(jī)又稱(chēng)為脈沖電機(jī),其最大特
2025-01-21 16:43:462503 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論