") 基于FPGA的步進(jìn)電機(jī)控制實(shí)現(xiàn)
基于FPGA的步進(jìn)電機(jī)控制實(shí)現(xiàn)

1、步進(jìn)電機(jī)概述
步進(jìn)電機(jī)是一種能夠?qū)㈦娒}沖信號(hào)轉(zhuǎn)換成角位移或線位移的機(jī)電元件,它實(shí)際上是一種單相或多相同步電動(dòng)機(jī)。單相步進(jìn)電動(dòng)機(jī)有單路電脈沖驅(qū)動(dòng),輸出功率一般很小,其用途為微小功率驅(qū)動(dòng)。多相步進(jìn)電動(dòng)機(jī)有多相方波脈沖驅(qū)動(dòng),用途很廣。使用多相步進(jìn)電動(dòng)機(jī)時(shí),單路電脈沖信號(hào)可先通過脈沖分配器轉(zhuǎn)換為多相脈沖信號(hào),在經(jīng)功率放大后分別送入步進(jìn)電動(dòng)機(jī)各相繞組。每輸入一個(gè)脈沖到脈沖分配器,電動(dòng)機(jī)各相的通電狀態(tài)就發(fā)生變化,轉(zhuǎn)子會(huì)轉(zhuǎn)過一定的角度(稱為步距角)。正常情況下,步進(jìn)電機(jī)轉(zhuǎn)過的總角度和輸入的脈沖數(shù)成正比;連續(xù)輸入一定頻率的脈沖時(shí),電動(dòng)機(jī)的轉(zhuǎn)速與輸入脈沖的頻率保持嚴(yán)格的對應(yīng)關(guān)系,不受電壓波動(dòng)和負(fù)載變化的影響。由于步進(jìn)電動(dòng)機(jī)能直接接收數(shù)字量的輸入,所以特別適合于微機(jī)控制。
2、步進(jìn)電機(jī)的種類
目前常用的步進(jìn)電機(jī)有三類:
(1)反應(yīng)式步進(jìn)電動(dòng)機(jī)(VR):它的結(jié)構(gòu)簡單,生產(chǎn)成本低,步距角可以做的相當(dāng)小,但動(dòng)態(tài)性能相對較差。
(2)永磁式步進(jìn)電動(dòng)機(jī)(PM):它的出力大,動(dòng)態(tài)性能好;但步距角一般比較大。
(3)混合步進(jìn)電動(dòng)機(jī)(HB):它綜合了反應(yīng)式和永磁式兩者的優(yōu)點(diǎn),步距角小,出力大,動(dòng)態(tài)性能好,是性能較好的一類步進(jìn)電動(dòng)機(jī)。
如果還想做更深入的了解,自行查找相關(guān)資料。
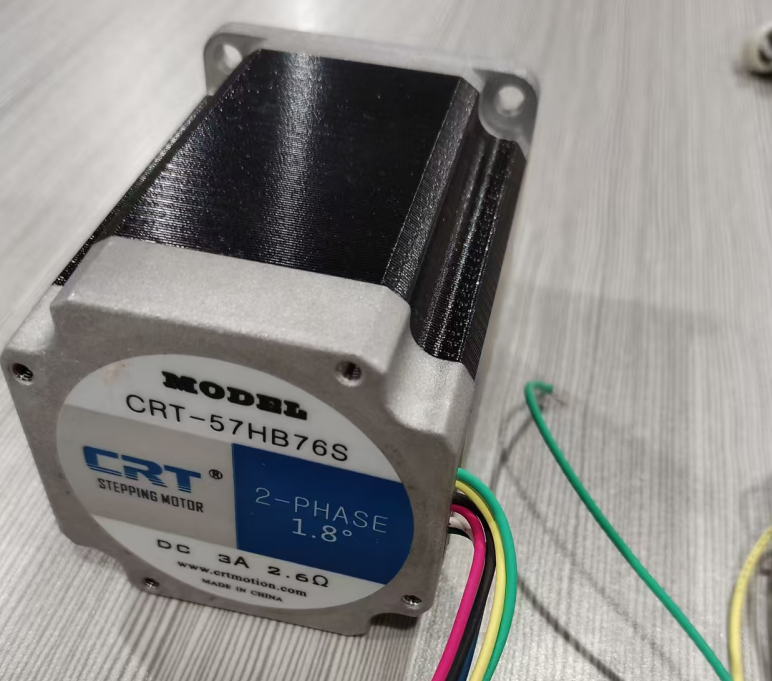
實(shí)驗(yàn)使用的電機(jī)如下
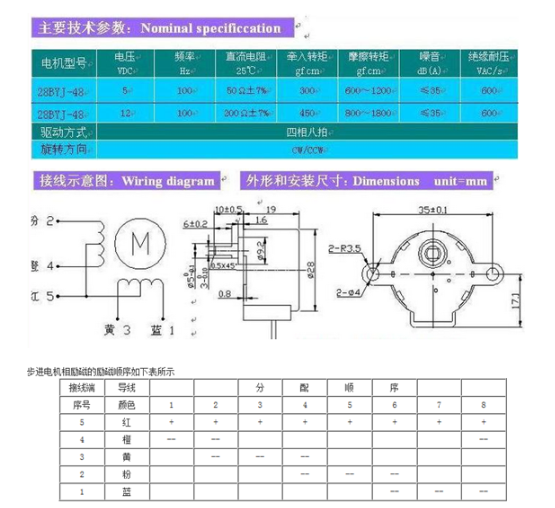
5V減速步進(jìn)電機(jī)(5線4相)
型號(hào):28BYJ-48
尺寸:28mm(直徑)
電壓:5V
步進(jìn)角度:5.625 x 1/64
減速比:1/64
應(yīng)用:適用于51/AVR/ARM等各種平臺(tái)。
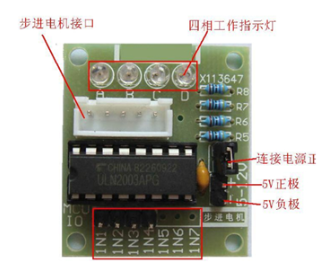
電機(jī)驅(qū)動(dòng)電路
3、步進(jìn)電機(jī)控制的實(shí)現(xiàn)
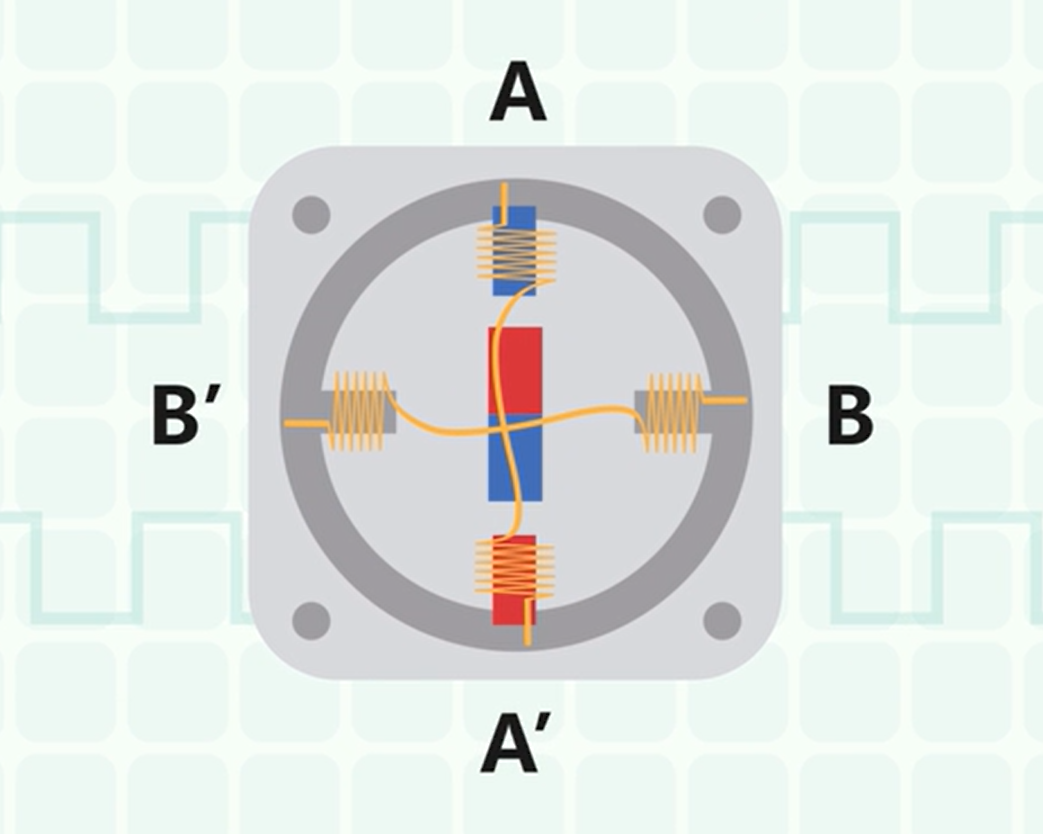
我們實(shí)驗(yàn)中所使用的步進(jìn)電機(jī)為四相步進(jìn)電機(jī)。轉(zhuǎn)子小齒數(shù)為64。系統(tǒng)中采用四路I/O進(jìn)行并行控制,FPGA直接發(fā)出多相脈沖信號(hào),在通過功率放大后,進(jìn)入步進(jìn)電機(jī)的各相繞組。這樣就不再需要脈沖分配器。脈沖分配器的功能可以由純軟件的方法實(shí)現(xiàn)。

四相步距電機(jī)的控制方法有四相單四拍,四相單、雙八拍和四相雙四拍三種控制方式。步距角的計(jì)算公式為:
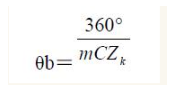
其中:m為相數(shù),控制方法是四相單四拍和四相雙四拍時(shí)C為1,控制方法是四相單、雙八拍時(shí)C為2,Zk為轉(zhuǎn)子小齒數(shù)。本系統(tǒng)中采用的是四相單、雙八拍控制方法,所以步距角為360°/512。但步進(jìn)電機(jī)經(jīng)過一個(gè)1/8的減速器引出,實(shí)際的步距角應(yīng)為360°/512/8。
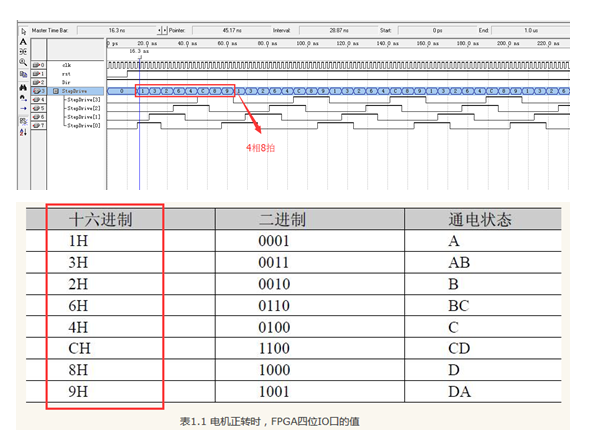
試驗(yàn)中使用EXI/O的高四位控制四相步進(jìn)電機(jī)的四個(gè)相。按照四相單、雙八拍控制方法,電機(jī)正轉(zhuǎn)時(shí)的控制順序?yàn)锳→AB→B→BC→C→CD→D→DA。 參見表如下:
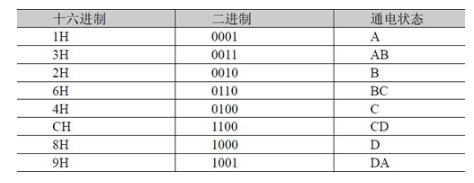
反轉(zhuǎn)時(shí),只要將控制信號(hào)按相反的順序給出即可。
步進(jìn)電機(jī)的頻率不能太快,也不能太慢。在200Hz附近最好。頻率太快是轉(zhuǎn)動(dòng)不起來的。
注:為什么步進(jìn)電機(jī)高于一定速度就無法啟動(dòng):
步進(jìn)電機(jī)有一個(gè)技術(shù)參數(shù):空載啟動(dòng)頻率,即步進(jìn)電機(jī)在空載情況下能夠正常啟動(dòng)的脈沖頻率,如果脈沖頻率高于該值,電機(jī)不能正常啟動(dòng),可能發(fā)生丟步或堵轉(zhuǎn)。在有負(fù)載的情況下,啟動(dòng)頻率應(yīng)更低。如果要使電機(jī)達(dá)到高速轉(zhuǎn)動(dòng),脈沖頻率應(yīng)該有加速過程,即啟動(dòng)頻率較低,然后按一定加速度升到所希望的高頻(電機(jī)轉(zhuǎn)速從低速升到高速)。
4、設(shè)計(jì)原理圖
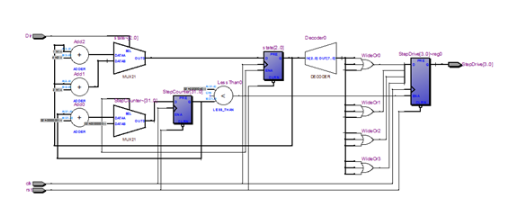
clk接時(shí)鐘;Dir接按鍵,控制正轉(zhuǎn)還是反轉(zhuǎn); rst接復(fù)位信號(hào);StepDrive接步進(jìn)電機(jī)的4個(gè)引腳。
電路板連接
電源連接
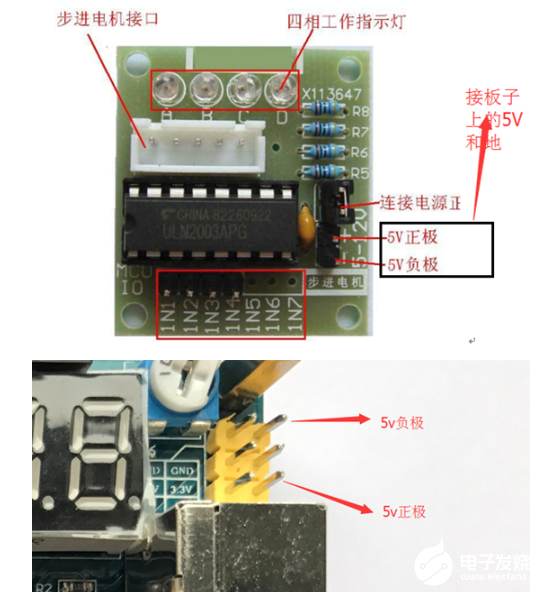
FPGA IO連接

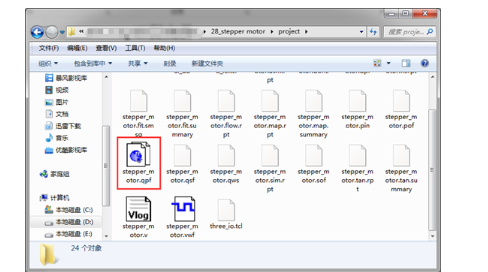
必須用Quartus 9.0版本軟件
工程文件
代碼文件

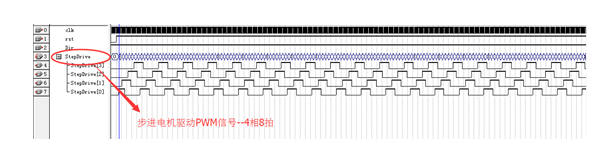
仿真波形文件

仿真結(jié)果
修改步進(jìn)電機(jī)的速度請?jiān)谶@里修改:

// 此處的數(shù)值為200000,因?yàn)閷?shí)驗(yàn)中所使用的晶振時(shí)鐘頻率是50MHz,
// 這樣我們?yōu)椴竭M(jìn)電機(jī)提供了250Hz的頻率,使之能正常工作。
仿真驗(yàn)證正確。
-
FPGA
+關(guān)注
關(guān)注
1660文章
22415瀏覽量
636540 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3249瀏覽量
152401 -
微機(jī)控制
+關(guān)注
關(guān)注
0文章
23瀏覽量
8802
發(fā)布評論請先 登錄
步進(jìn)電機(jī)驅(qū)動(dòng)器的作用介紹

步進(jìn)電機(jī)發(fā)熱問題及對策
步進(jìn)電機(jī)的控制原理
?DRV8711 步進(jìn)電機(jī)控制器技術(shù)文檔總結(jié)

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

采用MT6835絕對式磁編碼器實(shí)現(xiàn)高精度閉環(huán)步進(jìn)電機(jī)控制
基于MT6835磁編碼器IC的步進(jìn)電機(jī)全閉環(huán)伺服控制策略
單片機(jī)怎么控制步進(jìn)電機(jī)的
RTL級(jí)機(jī)器人電機(jī)控制器的FPGA設(shè)計(jì)

三相反應(yīng)式步進(jìn)電機(jī)智能控制系統(tǒng)設(shè)計(jì)
數(shù)據(jù)采集卡與步進(jìn)電機(jī)
HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解
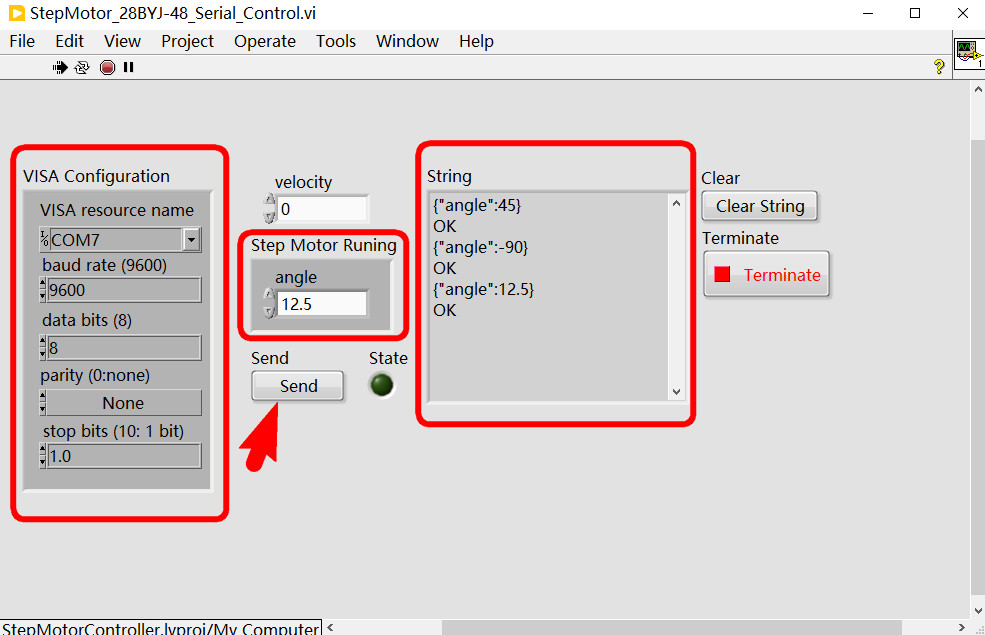
步進(jìn)電機(jī)的 LabVIEW 控制與應(yīng)用
樹莓派 RP2350 實(shí)現(xiàn)步進(jìn)電機(jī)精確控制
剎車步進(jìn)電機(jī)的特點(diǎn)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論