 電子發燒友App
電子發燒友App



1引言
隨著科學技術的發展,人類的研究活動領域已由陸地擴展到海底和空間。利用移動機器人進行空間探測和開發,己成為21世紀世界各主要科技發達國家開發空間資源的主要手段之一。研究和發展月球探測移動機器人技術,對包括移動機器人在內的相關前沿技術的研究將產生巨大的推動作用。
移動機器人是一種能夠通過傳感器感知外界環境和自身狀態,實現在有障礙物的環境中面向目標的自主運動,從而完成一定作業功能的機器人系統。近年來,由于移動機器人在工業、農業、醫學、航天和人類生活的各個方面顯示了越來越廣泛的應用前景,使得它成為了國際機器人學的研究熱點。20世紀90年代以來,以研制高水平的環境信息傳感器和信息處理技術,高適應性的移動機器人控制技術,真實環境下的規劃技術為標志,開展了移動機器人更高層次的研究。目前,移動機器人特別是自主機器人已成為機器人技術中一個于分活躍的研究領域。
輪式移動機構具有運動速度快、能量利用率高、結構簡單、控制方便和能借鑒至今已很成熟的汽車技術等優點,只是越野性能不太強。但隨著各種各樣的車輪底盤的出現,如日本NASDA的六輪柔性底盤月球漫游車LRTV,俄羅斯TRANSMASH的六輪三體柔性框架移動機器人Marsokohod,美國CMU的六輪三體柔性機器人Robby系列以及美國JPL的六輪搖臂懸吊式行星漫游車Rocky系列,已使輪式機器人越野能力大大增加,可以和腿式機器人相媲美。于是人們對機器人機構研究的重心也隨之轉移到輪式機構上來,特別是最近日本開發出一種結構獨特的五點支撐懸吊結構Micros,其卓越的越野能力較腿式機器人有過之而不及[6-8]。
輪式結構按輪的數量分可分為二輪機構、三輪機構、四輪機構、六輪以及多輪機構。二輪移動機構的結構非常簡單,但是在靜止和低速時非常不穩定。三輪機構的特點是機構組成容易,旋轉中心是在連接兩驅動輪的直線上,可以實現零回轉半徑。四輪機構的運動特性基本上與三輪機構相同,由于增加了一個支撐輪,運動更加平穩。以上幾種輪式移動機構的共同特點是它們所有的輪子在行駛過程中,只能固定在一個平面上,不能作上下調整,因此,地面適用能力差。一般的六輪機構主要就是為了提高移動機器人的地面適應能力而在其結構上作了改進,增加了搖臂結構,使得機器人在行駛過程中,其輪子可以根據地形高低作上下調整,從而提高了移動機器人的越野能力。
2機器人主體結構設計
主體結構為機器人的主要結構,里面包括了控制系統,四個驅動電機以及一些傳感器,傳感器包括有紅外傳感器,壓敏傳感器,聲音傳感器等用來充當機器人的眼睛、觸覺和聽覺功能。結構主要為一箱體結構,里面按需要放置電機及系統硬件。主體結構如圖1所示。
圖1機器人主體機構圖
圖1中整個主體是沒有加上任何傳感器和裝置的外殼,四個小箱體是安放控制上肢的電機,旁邊的孔是用來通過電線的,大箱體中間是安放控制系統的電板。在整個零配件都安放好以后可在上方添加一塊板用來保護內部元件。按照我的設想,在這個機器人的基礎上可以在主體上方添加其他功能。主體長1.5米寬0.5米高0.3米。
對于下肢部分,由于麥克納姆輪可以進行全方位的移動,故不需要加入關節,但需要加入剎車系統,以保證及時停車和在使用腿部功能時不發生滾動,同時在下肢與輪胎連接處設計平臺安放電機,使其驅動輪胎轉動。一個輪胎對應一個電機,這樣才能通過改變每個輪胎的轉速來控制方向等復雜的移動。
下肢除了像上肢一樣的結構外,多加了兩個在旁邊的箱體結構,并且下部分較寬大是用來與輪胎相連。上面的箱體是用于裝一個小型電機,通過下肢上端兩個同軸的孔與一根軸相連,來控制下肢繞上肢的轉動,而箱體的旁邊上端的孔是用來通過電線。下面的箱體是存放控制輪胎的電機,右邊有用來安放齒輪的空間和通孔來固定齒輪。下肢兩個豎直的同軸孔也是用來通過電線的。下肢總長約1米,下肢主體寬度約20厘米。
3輪式移動原理
輪式移動原理主要的為麥克納姆輪的移動原理。
麥克納姆輪是瑞典麥克納姆公司的專利。這種全方位移動方式是基于一個有許多位于機輪周邊的輪軸的中心輪的原理上,這些成角度的周邊輪軸把一部分的機輪轉向力轉化到一個機輪法相力上面。依靠各自機輪的方向和速度,這些力的最終合成在任何要求的方向上產生一個合力矢量從而保證了這個平臺在最終的合力矢量的方向上能自由地移動,而不改變機輪自身的方向。在它的輪緣上斜向分布著許多小棍子,故輪子可以橫向滑移。小滾子的母線很特殊,當輪子繞著固定的輪心軸轉動時,各個小滾子的包絡線為圓柱面,所以該輪能夠連續地向前滾動。麥克納姆輪結構緊湊,運動靈活,是很成功的一種全方位輪。有4個這種新型輪子進行組合,可以更靈活方便的實現全方位移動功能。
麥克納姆外形像一個斜齒輪,輪齒是能夠轉動的鼓形輥子,輥子的軸線與輪的軸線成α角度。這樣的特殊結構使得輪體具備了三個自由度:繞輪軸的轉動和沿輥子軸線垂線方向的平動和繞輥子與地面接觸點的轉動。這樣,驅動輪在一個方向上具有主動驅動能力的同時,另外一個方向也具有自由移動(被動移動)的運動特性。輪子的圓周不是由普通的輪胎組成,而是分布了許多小滾筒,這些滾筒的軸線與輪子的圓周相切,并且滾筒能自由旋轉。當電機驅動車輪旋轉時,車輪以普通方式沿著垂直于驅動軸的方向前進,同時車輪周邊的輥子沿著其各自的軸線自由旋轉。圖2為麥克納姆輪的各結構和運動參量。

圖2麥克納姆輪運動參量的定義
4伺服控制系統設計
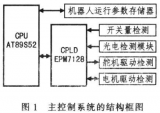
移動機器人的運動控制系統是機器人系統的執行機構,對系統精確地完成各項任務起著重要作用,有時也可作為一個簡單的控制器。構成機器人運動控制系統的要素有:計算機硬件系統及控制軟件、輸入/輸出設備、驅動器、傳感器系統,它們之間的關系如圖3所示。

圖3機器人控制系統構成要素
4.1移動機器人控制系統的研究
(1}移動機器人體系結構。利用分布式智能結構可以提高移動機器人的實時性和魯棒性,并減小移動機器人的體積和自重,使機器人更加輕便、靈活。
(2)控制系統中的傳感器技術。移動機器人傳感器技術主要是對機器人自身內部的位置和方向信息以及外部環境信息的檢測和處理。獲取真實有效的環境信息,是控制系統進行決策的保證。通常采用的傳感器分為內部傳感器和外部傳感器。內部傳感器主要包括:編碼器、線加速度計、陀螺儀、磁羅招等。外部傳感器主要包括:視覺傳感器、超聲波傳感器、紅外傳感器、接觸和接近傳感器等。
(3)控制系統的多傳感器信息融合技術。多傳感器信息融合是把分布在不同位置的傳感器所提供的局部環境的不完整信息加以綜合,消除多傳感器之間可能存在的冗余和矛盾,以降低其不確定性,形成對系統環境的相對完整一致的感知描述,從而提高智能系統決策、規劃的快速性和正確性,同時降低決策風險。
(4)控制系統的開發技術。重點研究開放式、模塊化控制系統。移動機器人控制器結構的標準化,以及網絡式控制器成為研究熱點。編程技術進一步提高在線編程的可操作性,離線編程的人機界面更加友好、自然語言化編程和圖形化編程的進一步推廣也是今后研究的重點。
(5)運動控制技術。機器人運動必須足夠快,受控并安全,避開靜態和動態的障礙。軌跡跟蹤、路徑跟蹤、點鎮定是移動機器人運動控制的三個基本問題;
(6)控制系統的智能化技術。控制系統的智能特征包括知識理解、歸納、推斷、反應和問題求解等內容。涉及領域包括圖像理解、語音和文字符號的處理與理解、知識的表達和獲取等方面。智能控制方法常使用神經網絡和模糊控制方法,但前者往往伴隨著對存儲容量、運算速度的較高要求,這與移動機器人高速高精度運動控制的要求存在一定差距,故模糊控制方法在機器人控制方面有著較大的優勢。
根據移動機器人控制系統的設計要求,結合本機器人的系統功能和特點,按照模塊化的設計思想,提出了機器人控制系統總體設計方案。如下圖所示:

圖4控制系統總體方案
控制系統總體設計方案
該方案是以ATmega128芯片為核心,分模塊化設計,各子模塊功能為:
(1)微處理器模塊:是控制系統的核心,包括微控制器及其相關外圍電路主要進行各種信息、數據的處理,協調系統中各功能模塊完成預定的任務;
(2)驅動模塊:控制機器人系統中的舵機和傳感器模塊預定的任務;實現舵機速度和位置的控制,完成前進、后退、直行、轉彎、避障、抓取等動作;
(3)傳感器模塊:有速度、位置、距離、聲音等傳感器,主要負責移動機器人移動過程中的障礙物、聲音等檢測;
(4)電源模塊:負責整個移動機器人的電源供給,使系統能離線運動,主要由12V蓄電池及相關調壓穩壓電路組成;
(5)串口通信模塊:根據RS232通信標準與上位機進行串口通信;
(6)JTAG調試:可以實現在線編程、調試仿真。
3.2機器人的驅動系統
目前,愛機器人的運動控制中較為常見的有直流電機、步進電機和舵機。對于我的課題來說,一個能控制速度的電機作為麥克納姆輪使用,也需要一個能精確可控制角度且可以保持的電機作為腿部關節使用。經過我初步估計電機轉速不是很大,如果使用直流電機,由于轉速和力矩的影響,需配置減速器,且不能控制角度。而如果使用步進電機,需配置驅動器。為滿足系統的控制要求,考慮到經濟性等,我準備采用Dynamixel系列AX-12舵機它是機器人專用的伺服電機。它不但能精確控制角度,作為關節角度控制;也可以通過軟件設置為無限旋轉模式,作為車輪使用。
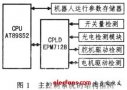
3.3AX-12數字舵機概述及特性
舵機是一種位置伺服的驅動器,適用于那些需要角度不斷變化并可以保持的控制系統。其工作原理是:控制信號由接收機的通道進入信號調制芯片,獲得直流偏置電壓。它內部有一個基準電路,產生周期為20mS,寬度為1.5ms 的基準信號,將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出。最后,電壓差的正負輸出到電機驅動芯片決定電機的正反轉。AX-12舵機是一款智能化、模塊化的動力裝置,主要由一個微處理器、一個精確的直流電機、齒輪減速器、位置傳感器、溫度傳感器以及具備通訊功能的控制芯片等組成,其內部機械結構和電路控制如圖4所示:
圖4.1舵機內部結構和控制圖
AX-12數字舵機作為舵機用時,最大轉角為300度,作為電機用時可以自由旋轉,應用范圍廣;采用數字信號控制,控制起來更方便;每個舵機都擁有唯一的ID號,采用網絡驅動模式、Daisy總線連接方式,可以多個網狀串連控制,連接方便。它的具體參數如表1.1所示。
表1.1舵機具體參數
項目參數項目參數
重量55g位移角度0-300°無限旋轉
減速比1/254最小角度0.35°
工作電壓7VDC-12VDC通訊半雙工異步串行通信
工作溫度-5-85攝氏度波特率7343bps-1Mbps
最大電流900mA指令包數字信號
輸入電壓7V10V物理連接TTL多通道(daisy總線)
最大扭矩12(Kgf?cm)16.5(Kgf?cm)材料工程塑料
轉速0.269(秒/60°)0.196(秒/60°)反饋位置、溫度、負載、電壓等
由于AX-12內部配有一個ATmega8微處理器,用來接收控制器發送的數據包,通過相應的處理后給伺服電機發送PWM信號來控制電機的起停。因此,控制舵機實際上是去控制ATmega8舵機的狀態和參數都存儲在ATmega8的RAM和EEPROM相應的地址里,對舵機進行控制也就是對舵機的相應地址讀和寫數據的過程。
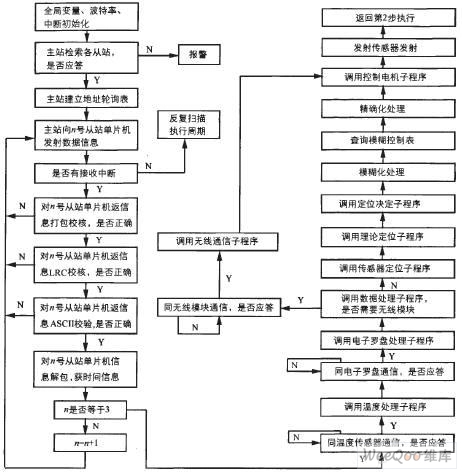
5AX-12舵機通信協議
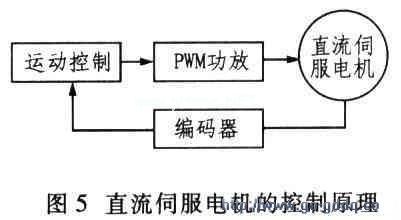
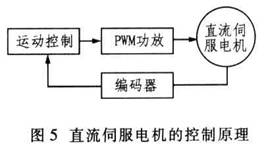
AX-12數字舵機不像一般的R/C伺服電機(舵機)使用PWM控制,它的控制信號為數字信號,主控制器和舵機采用TTL-Daisy總線的連接方式、半雙工異步串行通訊協議((8位數據位、1位終止位,無奇偶校驗位)。主控制器通過發送和接受數據包的形式來控制舵機,有兩種數據包:一個是指令包,這是從主控制器發給舵機的指令;另一個是狀態包,這是舵機返回給主控器的。如果主控器向ID為N的舵機發送指令包,則只有該ID的舵機會反饋相應的狀態并且執行需要的動作。控制原理圖如圖5所示:

圖5舵機控制原理圖
6結束語
本文設計了一種輪式移動機器人運動控制系統:即基于伺服控制的移動機器人運動控制系統。本系統采用數控插補技術來跟蹤軌跡,具有跟蹤精度高等特點。選擇了專門用于電機控制的DSP芯片,簡化了設計,提高了模塊的可靠性,并為今后控制算法的升級留有足夠的空間。本文采用的移動機器人規劃路徑的航跡推算數學模型,它不同于傳統的只對直線和圓弧離散,而對一次、二次曲線跟蹤路徑都可以作離散化處理。運動控制系統采用主從式控制結構,即由主機完成復雜計算,將處理后的數據傳遞給從機,由從機完成對小車本體的控制,方便地實現了步進電機控制。由從機執行的運動控制器,成本低,功能強,使用方便,而具有十分廣闊的應用前景。














 工商網監
工商網監
評論