傳統的機器人控制技術大多是基于模型的控制方法,無法得到滿意的軌跡跟蹤效果,模糊控制和神經網絡等人工智能的發展為解決機器人軌跡跟蹤問題提供了新的思路。本文采用高斯函數作為模糊隸屬函數,將模糊控制
2016-09-19 14:34:39 2229
2229 
機器人視覺伺服系統是機器人領域中的重要研究方向,起源于80年代初,隨著計算機技術、圖像處理技術、控制理論的發展,取得了很大進步,有一些系統已投入使用。視覺伺服跟通常所
2011-10-08 16:04:422609 機器人不僅需要人工智能(AI)才能實現自主。他們還需要大量傳感器,傳感器融合以及邊緣的實時推理。之前我們已經嘗到了深度卷積神經網絡的好處,如今來自激光雷達的更高數據處理的需求正在推動神經網絡到新拓撲
2021-12-20 06:16:22
目前產業機器人僅能在嚴格定義的結構化環境中執行預定指令動作,缺乏對環境的感知與應變能力,這極大地限制了機器人的應用。利用機器人的視覺控制,不需要預先對產業機器人的運動軌跡進行示教或離線編程,可節約
2015-01-23 15:02:27
,特別是溫度的影響是測量誤差的主要,為保證SAW壓力傳感器高準確度和高靈敏度測量,必須進行有效的溫度補償。本文將神經網絡和模糊控制技術相結合,對SAW壓力傳感器進行智能化溫度補償,通過此方法進行的改進
2018-10-24 11:36:52
、成本及功耗的要求。輕型嵌入式神經網絡卷積式神經網絡 (CNN) 的應用可分為三個階段:訓練、轉化及 CNN 在生產就緒解決方案中的執行。要想獲得一個高性價比、針對大規模車輛應用的高效結果,必須在每階段
2017-12-21 17:11:34
ABB機器人伺服電機維修常見故障是什么?
2021-09-29 06:48:18
針對傳統比例積分(PI)控制在電機控制中控制效果不良的問題,設計了一種基于向后傳播算法(BP)模糊神經網絡的PI控制器。基于MATLAB/Simulink建立了純電動汽車驅動系統的仿真模型,將駕駛員
2019-12-10 16:32:40
ZN-RAI02工業機器人與視覺實訓平臺是什么?ZN-RAI02工業機器人與視覺實訓平臺有哪些技術性能?ZN-RAI02工業機器人與視覺實訓平臺的結構是由哪些部分組成的?ZN-RAI02工業機器人與視覺實訓平臺有哪些配套軟件?
2021-08-09 06:22:03
請問:我在用labview做BP神經網絡實現故障診斷,在NI官網找到了機器學習工具包(MLT),但是里面沒有關于這部分VI的幫助文檔,對于”BP神經網絡分類“這個范例有很多不懂的地方,比如
2017-02-22 16:08:08
神經網絡與遺傳算法對協調控制器輸出的各個控制量進行計算,設計基于此偏差信息控制的十字滑塊和焊后焊縫跟蹤機器人移動機構協調控制系統偏差,但協調控制是一個非常復雜的問題,控制器的設計直接決定了機器人的跟蹤效果
2015-08-10 22:27:36
。雙模式智能機器人的設計:模式一、無人導航,加入模糊神經網絡的蔽障算法實現自動蔽障。二、遙控模式,基于無線遙控模塊(預計使用藍牙),完成遙控導航。4。硬件模塊預計主要會涉及:藍牙、超聲波雷達、直流電機
2016-10-20 15:50:35
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人的規劃與控制系統。這些基礎模塊在自主機器人系統中占據了
2025-01-04 19:22:08
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
簡單理解LSTM神經網絡
2021-01-28 07:16:57
抽象人工智能 (AI) 的世界正在迅速發展,人工智能越來越多地支持以前無法實現或非常難以實現的應用程序。本系列文章解釋了卷積神經網絡 (CNN) 及其在 AI 系統中機器學習中的重要性。CNN 是從
2023-02-23 20:11:10
本文設計了一種基于神經網絡控制算法的伺服運動控制卡。
2021-06-03 06:05:09
最近在學習電機的智能控制,上周學習了基于單神經元的PID控制,這周研究基于BP神經網絡的PID控制。神經網絡具有任意非線性表達能力,可以通過對系統性能的學習來實現具有最佳組合的PID控制。利用BP
2021-09-07 07:43:47
,為工業自動化提供了一套切實可行的方案。
本文針對基于機器視覺的工業機器人進行研究,主要工作包括以下幾點:
(1)設計了基于 伊瑟特的六自由度機器人視覺伺服控制系統總體方案。以 ESR6B機器人
2024-05-29 16:17:06
任務。相比于傳統的編程方法,它更擅長處理一些人類很容易完成,但傳統計算機難以解決的問題,如語音識別,機器翻譯,人臉識別等等。自從近年來深度學習算法的提出,人工神經網絡已漸漸地投入實際應用中,如手機語音
2018-04-20 10:53:09
任務。相比于傳統的編程方法,它更擅長處理一些人類很容易完成,但傳統計算機難以解決的問題,如語音識別,機器翻譯,人臉識別等等。自從近年來深度學習算法的提出,人工神經網絡已漸漸地投入實際應用中,如手機語音
2018-04-20 10:53:09
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統的研究是機器人領域中的重要內容之一,其研究成果可應用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
“狗”。深度學習主要應用在數據分析上,其核心技術包括:神經網絡搭建、神經網絡訓練及調用。CNN神經網絡訓練 機器視覺中的圖像預處理屬于傳統技術,包括形態變換、邊緣檢測、BLOB分析等。圖像在人眼和機器下
2018-05-31 09:36:03
人工智能下面有哪些機器學習分支?如何用卷積神經網絡(CNN)方法去解決機器學習監督學習下面的分類問題?
2021-06-16 08:09:03
席文姣,陳帝伊,馬孝義(西北農林科技大學 水利與建筑工程學院,陜西 西安712100)0引言如何設計智能滅火機器人控制器?控制器是智能機器人處理和控制信息的主體,它直接決定了機器人的行為和性能
2019-07-31 06:23:18
機器人不僅需要人工智能(AI)才能實現自主。他們還需要大量傳感器,傳感器融合以及邊緣的實時推理。之前我們已經嘗到了深度卷積神經網絡的好處,如今來自激光雷達的更高數據處理的需求正在推動神經網絡到新拓撲
2021-12-20 06:44:08
`機器人不僅需要人工智能(AI)才能實現自主。他們還需要大量傳感器,傳感器融合以及邊緣的實時推理。之前我們已經嘗到了深度卷積神經網絡的好處,如今來自激光雷達的更高數據處理的需求正在推動神經網絡到
2019-04-16 10:07:33
工業機器人的產業鏈分為上游核心零部件,中游本體和傳感器等生產,以及下游的系統集成等。核心零部件是減速機、伺服系統、控制系統三部分,分別對應執行系統、驅動系統、控制系統,分別占成本的35%、25
2017-08-23 15:10:27
在物流搬運行業,拳頭機器人由于其獨特的并聯結構,常用于高速整列、裝箱等場合。其中,拳頭機器人的視覺線跟蹤技術正得到廣泛的應用,如下圖所示:
2020-08-06 06:30:31
掃地機器人工作。二 智能掃地機器人控制方案簡介1. 方案概述智能掃地機器人控制方案實現方式是用戶可以通過智能手機微信綁定掃地機器人,無論用戶在何時何地,都可以利用遠程控制,對掃地機器人進行監控和操作
2017-05-27 13:31:20
隨著計算機科學和自動控制技術的發展,越來越多的不同種類的智能機器人出現在工廠、生活當中,機器人視覺系統作為智能機器人系統中一個重要的子系統,也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
小女子做基于labview的蒸發過程中液位的控制,想使用神經網絡pid控制,請問這個控制方法可以嗎?有誰會神經網絡pid控制么。。。叩謝
2016-09-23 13:43:16
針對模糊神經網絡訓練采用BP算法比較依賴于網絡的初始條件,訓練時間較長,容易陷入局部極值的缺點,利用粒子群優化算法(PSO)的全局搜索性能,將PSO用于模糊神經網絡的訓練過程.由于基本PSO算法存在
2010-05-06 09:05:35
解析深度學習:卷積神經網絡原理與視覺實踐
2020-06-14 22:21:12
各位大神,請問有沒有編過模糊PID控制程序或神經網絡控制程序?
2015-01-12 10:50:48
原文鏈接:【嵌入式AI部署&基礎網絡篇】輕量化神經網絡精述--MobileNet V1-3、ShuffleNet V1-2、NasNet深度神經網絡模型被廣泛應用在圖像分類、物體檢測等機器
2021-12-14 07:35:25
神經網絡模糊系統及其在運動控制中的應用是一本關于人工神經網絡、模糊邏輯系統,以及模糊神經網絡研究成果的專著。作者在簡要介紹神經網絡理論與模糊理論的基礎上,對人
2009-01-13 15:18:34 0
0 基于神經網絡的信息收集機器人導航界面
Neural Network Based Navigation Interface for Robot of Information Collection
2009-03-16 15:18:077 機器人視覺伺服系統是機器人領域一項重要的研究方向,它的研究對于開發手眼協調的機器人在工業生產、航空航天等方面的應用有著重要的意義。本文針對機器人視覺伺服系統的
2009-05-30 11:34:0127 模糊神經網絡提供了從人工神經網絡中模糊規則的抽取。本文研究模糊神經網絡的自適應學習、規則插入和抽取及神經-模糊推理的FuNN 模型。把遺傳算法作為系統模糊規則選擇的自
2009-06-06 13:45:4218 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-06-09 10:47:3617 為了對模型復雜的輪式地面機器人進行轉向控制,應用了模糊遺傳PID控制方法。先用模糊神經網絡建立車體模型,再用遺傳PID進行參數尋優,最后用優化參數控制機器人轉向。該方法能
2009-06-10 13:20:5026 介紹一種基于RBF 的模糊神經網絡設計與仿真分析的實現方法。該方法利用MATLAB 中的神經網絡工具箱圖形用戶界面GUI 結合模糊控制規則表給定的輸入/輸出樣本數據設計、構建RBF 模糊
2009-06-10 14:22:4928 視覺伺服可以應用于機器人初始定位自動導引、自動避障、軌線跟蹤和運動目標跟蹤等控制系統中。傳統的視覺伺服系統在運行時包括工作空間定位和動力學逆運算兩個過程,需要
2009-07-16 08:43:2541 將神經網絡和PID 控制相結合,提出了一種基于對角遞歸神經網絡整定的PID 控制策略,并將其應用于交流伺服系統的控制。利用對角遞歸神經網絡在線自適應調整PID 控制器的參數,
2009-07-30 09:40:1210 本文提出了用于SCARA 機器人運動控制的自組織模糊聚類神經網絡控制器。該控制器基于模糊聚類方法在學習模糊規則之前先優化訓練數據,去除冗余數據并解決數據沖突問題,不但
2009-08-04 15:33:1823 移動機器人路徑規劃可分為兩種類型:(1)全局路徑規劃;(2)局部路徑規劃。本文分析了Kohonen神經網絡算法及其識別機理,提出了Kohonen神經網絡和BP神經網絡結合起來進行路徑規劃
2009-08-15 09:02:2913 為了獲得伺服系統較高的跟蹤和魯棒性能,考慮摩擦、負載的時變性,提出了基于對角遞歸神經網絡控制器的控制方案,改善系統的跟隨性和抗擾性。仿真結果表明,采用對角遞
2009-12-12 16:48:3410 針對中長期負荷預測,本文將模糊理論與神經網絡相結合,提出了基于高木-關野自適應神經網絡模糊推理系統的中長期負荷預測模型。該模型采取神經網絡技術對模糊信息進行處理
2009-12-18 16:48:046 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-12-19 11:50:0312 針對含有建模誤差和不確定干擾的多關節機器人軌跡跟蹤控制,提出了一種模糊神經滑模控制方法。該方法采用全局快速終端滑模面,保證了系統能夠從任意初始狀態在有限時間
2009-12-19 15:19:1312 機器人動力學控制由于其數學模型的不確定性,一直是困擾該領域的難題之一。本文研究了通過神經網絡逆系統方法實現機器人的解耦,然后在外環施加控制的新方法。文中對該
2010-01-11 16:54:2311 介紹了MATLAB軟件的仿真技術在神經網絡一模糊控制電冰箱的仿真研究中的應用,并用匯編語言編程實現了制冷目標溫度和制冷過程的模糊控制,以及神經網絡在預冷和化霜等智能控
2010-01-12 16:57:4234 本文提出了一種模糊神經網絡控制器,該控制器用于工業機器人關節驅動的位置控制,克服了傳統PID很難達到對非線性以及不確定因素的控制效果和簡單模糊控制不能完全消除穩態
2010-03-03 15:14:5783 模糊神經網絡在GPS高程轉換中的應用
摘要: 介紹了模糊神經網絡基本原理和GPS 高程轉換方法, 采用模糊神經網絡算法, 實現了GPS 高程轉換. 在用模糊神經網絡進
2010-04-26 11:27:2812 采用模糊神經網絡結構,提出一種復合式控制方案,以解決傳統自適應控制中模型的在線辨識和控制器的在線設計問題,達到對不確定非線性系統的高精度輸出跟蹤控制;同時,利用一個魯
2010-07-20 14:40:0215 詳細介紹了CMAC神經網絡結構" 中間層作用函數地址的計算方法" 輸出層權值的學習算法# 并利用CMAC神經網絡對水下機器人深度模糊控制器進行了學習$ 仿真結果表明% 訓練得到的
2010-07-22 15:49:5925
隨著智能信息技術的發展,模糊神經網絡算法廣泛應用于工業控制。但該算法尚未應用于PLC。針對這種現狀,給出基于S7-200 PLC的模糊神經網絡算法設計。利用模糊神經
2010-12-24 16:55:1949 在應用徑向基函數RBF(Radial Basis Function)神經網絡對機器人進行軌跡規劃時,為解決一般學習算法中收斂速度慢、學習精度不高的問題,提出一種混合學習算法。該方法根據軌跡規劃
2010-12-31 17:17:5118 產品介紹 ABB3HEA800535-001是一款用于ABB機器人的伺服電機ABB機器人的關鍵技術包括:?運動控制技術?:通過控制機器人的關節角度和速度,實現復雜的運動軌跡,確保高精度
2024-10-11 17:25:46
運動控制 是人工神經網絡應用于機器人控制的重要內容。本文就人工神經網絡用于機器人運動學正解問題進行研究, 通過建立機器人運動學神經網絡模型, 給出了相應的BP 算法, 并對2R、
2011-06-28 11:04:3238 基于神經網絡的自主吸塵機器人混合視覺研究!資料來源網絡,如有侵權,敬請見諒
2015-11-20 15:34:540 基于彩色視覺和模糊控制的移動機器人路徑跟蹤電子論文!資料來源網絡,如有侵權,敬請見諒
2015-11-30 11:34:383 基于粗神經網絡的仿人智能機器人的語音融合算法研究電子論文!資料來源網絡,如有侵權,敬請見諒
2015-11-30 11:34:244 基于人工神經網絡實現智能機器人的避障軌跡控制!資料來源網絡,如有侵權,敬請見諒
2015-11-30 11:33:3048 基于神經網絡信息融合的智能機器人!資料來源網絡,如有侵權,敬請見
2015-11-30 11:33:204 神經網絡在智能機器人導航系統中的應用研究!資料來源網絡,如有侵權,敬請原諒!
2015-12-25 09:35:598 基于模糊神經網絡的RoboCup足球機器人局部路徑規劃方法研究
2016-01-04 14:59:050 模糊系統、模糊神經網絡及應用程序設計-上科。
2016-04-11 17:14:030 模糊控制與神經網絡-北航,有需要的下來看看。
2016-04-11 17:33:160 本文將模糊控制與神經網絡相結合,設計一種基于模糊神經網絡的機器人位置控制系統,并將其運用到機器人軌跡跟蹤控制系統中,本系統中,立體定位系統作為主要數據輸入通道,用于精確獲取目標位置與機器人之間精確的相對位置。隨后將這些現場實時空間信息融入先前建立的空間模型。
2016-09-18 11:43:402373 本文將模糊控制與神經網絡相結合,設計一種基于模糊神經網絡的機器人位置控制系統,并將其運用到機器人軌跡跟蹤控制系統中,本系統中,立體定位系統作為主要數據輸入通道,用于精確獲取目標位置與機器人之間精確的相對位置。隨后將這些現場實時空間信息融入先前建立的空間模型。
2016-09-19 10:53:1832 傳統的機器人控制技術大多是基于模型的控制方法,無法得到滿意的軌跡跟蹤效果,模糊控制和神經網絡等人工智能的發展為解決機器人軌跡跟蹤問題提供了新的思路。普通模糊控制的控制規則大部分是人們的經驗總結.不
2016-09-22 11:15:3423 提出一種新的機器人視覺伺服控制方法,該方法參照人的抓取動作,首先根據物體在圖像中的位置信息,利用模糊邏輯將機器人的手爪移動到物體附近,然后再根據物體當前圖像和參考圖像之差,利用局部神經網絡對手爪的位姿進行精確調整。整個過程無需機器人和攝像機的標定,能有效利用人的控制經驗。
2016-09-22 11:15:3416 移動機器人編隊的神經網絡滑模控制_朱玲
2017-01-07 17:16:230 提出含慢、快變控制項的組合控制器。對于慢變子系統,設計一種無需模型的模糊徑向基函數( RBF)神經網絡(FRBFNN)自適應跟蹤控制方案,利用神經網絡觀測器估計關節角速度信息,并對系統的未知非線性函數進行逼近;對于快變子系統,采用
2017-12-11 14:11:310 模糊神經網絡就是模糊理論同神經網絡相結合的產物,它匯集了神經網絡與模糊理論的優點,集學習、聯想、識別、信息處理于一體。
2017-12-29 14:40:4050582 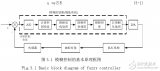
模糊神經網絡是將人工神經網絡與模糊邏輯系統相結合的一種具有強大的自學習和自整定功能的網絡,是智能控制理論研究領域中一個十分活躍的分支,因此模糊神經網絡控制的研究具有重要的意義。本文旨在分析模糊神經網絡的優缺點及其用途。
2017-12-29 15:35:3328275 神經網絡控制系統又成為模糊控制系統,是個新興的控制方法,就象我們說小明學習很好,但是怎么個好法就是個很模糊的概念。模糊控制不同與經典控制理論的關鍵在于他有一套屬于他自己的模糊算法,這個對數學的要求還是挺高的,模糊控制也成做為智能控制系統。
2018-01-02 14:47:299053 
網絡中心機房的溫度是大延時、大慣性的被控對象,針對此特點,以模糊控制和神經網絡結合的思想,設計了一種基于模糊神經網絡的控制器。建立了以T-S模糊模型為基礎的5層模糊神經網絡結構,并采用改進的BP算法
2018-01-09 16:04:090 生物的諸多技能是在生物個體的生長發育過程中逐漸形成和發展起來的,能否賦予機器人這樣一種特性呢?為此,本文基于BP神經網絡為機器人建立起一種類似生物的感覺運動系統,使機器人與外界環境之間交互作用,產生
2018-01-09 16:46:481 研究了半被動雙足機器人的平面穩定行走控制問題。以最簡行走模型為動力學模型,采用沿支撐腿方向的腳后跟脈沖推力作為行走動力源。考慮到系統模型的非線性特征,將基于三角函數擴展的函數鏈接型人工神經網絡控制
2018-01-14 15:49:060 當今,隨著社會的全面發展,對機器人的要求越來越高,機器人高度智能化已成為熱點研究問題。視覺控制是機器人智能化的重要實現方法,其利用視覺得到大量的環境信息,通過智能化分析自主規劃行為,實現智能控制。神經網絡能夠模擬復雜的函數關系,可作為機器人的智能控制核心。
2018-11-12 11:12:584099 機器人視覺伺服系統是機器視覺和機器人控制的有機結合,是一個非線性、強耦合的復雜系統,其內容涉及圖象處理、機器人運動學和動力學、控制理論等研究領域。
2019-07-02 15:20:414994 谷歌大腦研究人員通過精簡神經網絡結構,在前幾代中發現了最小架構的神經網絡能夠控制此處所示的雙足機器人,即使它的得分不高。
2020-02-05 16:55:501579 常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。
2020-09-10 16:40:234748 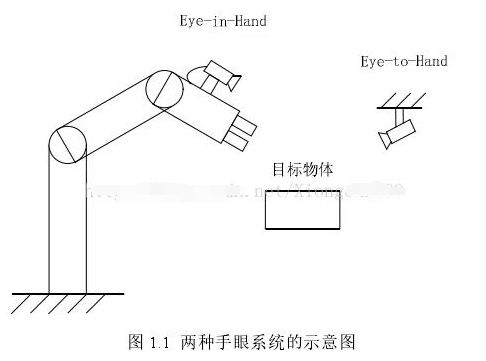
本文對機器人視覺伺服技術進行了綜述,介紹了機器人視覺伺服系統的概念及發展歷程和分類,重點介紹了基于位置的視覺伺服系統和基于圖像的視覺伺服系統。對機器人視覺所涉及的前沿問題做了概括,并指出了目前研究中所存在的問題及今后發展方向。
2021-04-08 09:11:5313041 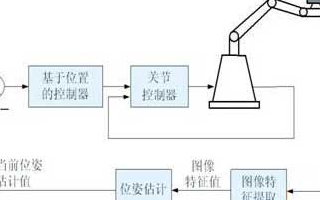
基于模糊神經網絡的微型渦噴發動機控制系統
2021-06-23 14:46:1019 的分布更為明確;在機器人視覺領域,通過圖像邊緣檢測技術提高機器人視覺的精度等。 隨著科技的發展,人們將神經網絡加載進入圖像檢測中,但現有的神經網絡還存在不少缺陷。 1.檢測時間較長:ChouY等提出了一種改進的基于CNN的神經
2021-07-06 10:00:182188 常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。 以常見的焊接機器人系統為例,有兩種構型。
2023-02-06 15:24:211955 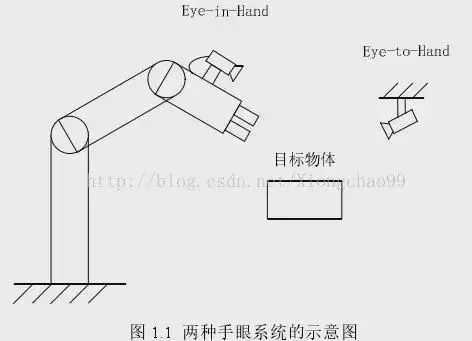
研究團隊設計了以寬度神經網絡為主體的微型機器人基本運動控制器;基于李雅普諾夫穩定理論,推導了保障機器人運動穩定的控制器網絡參數約束,簡化了不同運動基元的控制器參數訓練學習過程。
2023-05-30 10:21:45657 
常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。
2023-08-04 11:48:471329 
? 機器人視覺系統的硬件選擇直接影響圖像采集,圖像的質量和后期的處理,并影響整個控制系統的實時性,所以應根據要求和這些硬件性能,嚴格選擇硬件。基于伊瑟特的六自由度機器人視覺伺服控制系統主要包括攝像頭、Zynq、存儲、顯示、通信等模塊。
2024-04-24 10:31:261295 
,雖然在某些應用場景下取得了較好的效果,但在面對復雜、不確定和動態變化的環境時,其性能往往受到限制。神經網絡作為一種模擬人腦神經元網絡的計算模型,具有強大的非線性映射能力和自適應學習能力,被廣泛應用于機器人控制領域
2024-07-09 09:40:011648 機器人神經網絡系統是一種模擬人類大腦神經網絡的計算模型,具有高度的復雜性和靈活性。在本文中,我們將詳細介紹機器人神經網絡系統的特點,包括其結構、功能、優勢和應用等方面。 一、引言 神經網絡是一種受人
2024-07-09 09:45:471409 神經網絡控制是一種利用人工神經網絡對復雜系統進行建模和控制的方法。它在許多領域得到了廣泛的應用,如工業自動化、機器人技術、航空航天、生物醫學工程等。 一、引言 1.1 神經網絡的基本概念 神經網絡
2024-07-09 09:47:231550
 電子發燒友App
電子發燒友App



















 工商網監
工商網監
評論