一種新的機器人視覺伺服控制方法,該方法參照人的抓取動作,首先根據物體在圖像中的位置信息,利用模糊邏輯將機器人的手爪移動到物體附近,然后再根據物體當前圖像和參考圖像之差,利用局部神經網絡對手爪的位姿進行精確調整。整個過程無需機器人和攝像機的標定,能有效利用人的控制經驗.
2016-09-19 15:34:21 2031
2031 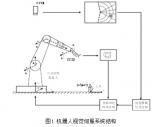
機器人不僅需要人工智能(AI)才能實現自主。他們還需要大量傳感器,傳感器融合以及邊緣的實時推理。之前我們已經嘗到了深度卷積神經網絡的好處,如今來自激光雷達的更高數據處理的需求正在推動神經網絡到新拓撲
2021-12-20 06:16:22
技術特征:1.一種利用計算機控制的快遞分揀機器人,包括分揀機器人底座(1)、分揀機器人支架(2)和計算機控制器(3),分揀機器人底座(1)上安裝有分揀機器人支架(2),分揀機器人支架(2)上安裝
2021-09-02 09:01:42
摘要故障診斷是保證水輪發電機組安全運行的重要環節。軸心軌跡辨識是HGU故障診斷的一種有效方法。提出了一種基于綜合幾何特征和概率神經網絡(CGC-PNN)的HGU軸軌識別方法。該方法從結構、區域和邊界
2021-09-15 08:18:35
圖數據是一種非結構化的數據,但能夠蘊含很多結構化數據中無法蘊含的信息。圖數據無處不在,世界上大部分數據都能夠用圖數據來表達。為了高效的提取圖特征,圖神經網絡是一種非常重要的圖特征提取方式。圖神經網絡
2022-09-28 10:34:13
PID控制的優點有哪些?機器人控制技術有哪些重要性?
2021-06-18 08:02:56
。鑒于此種情況,本文采用了神經模糊控制方法,對SAW壓力傳感器進行智能溫度補償。 神經模糊控制是一種用神經網絡實現的模糊控制的方法。在形式結構上是用多點網絡實現的模糊映射。而神經網絡的非線性和可訓練性
2018-10-24 11:36:52
工智能。幾乎是一夜間,神經網絡技術從無人相信變成了萬人追捧。神經網絡之父Hiton1、人工神經網絡是什么?人工神經網絡:是一種模仿動物神經網絡行為特征,進行分布式并行信息處理的算法數學模型。這種網絡依靠系統
2018-06-05 10:11:50
針對傳統比例積分(PI)控制在電機控制中控制效果不良的問題,設計了一種基于向后傳播算法(BP)模糊神經網絡的PI控制器。基于MATLAB/Simulink建立了純電動汽車驅動系統的仿真模型,將駕駛員
2019-12-10 16:32:40
請問:我在用labview做BP神經網絡實現故障診斷,在NI官網找到了機器學習工具包(MLT),但是里面沒有關于這部分VI的幫助文檔,對于”BP神經網絡分類“這個范例有很多不懂的地方,比如
2017-02-22 16:08:08
對誤差的分析與研究最終目的都是為了通過各種方法與技術來消除或者降低這些誤差帶來的影響,而誤差補償技術則是用來消除或者降低位姿誤差而得到廣泛應用的一種技術。一般常用的機器人誤差補償方法可分為兩類:一
2017-07-14 15:02:25
神經網絡與遺傳算法對協調控制器輸出的各個控制量進行計算,設計基于此偏差信息控制的十字滑塊和焊后焊縫跟蹤機器人移動機構協調控制系統偏差,但協調控制是一個非常復雜的問題,控制器的設計直接決定了機器人的跟蹤效果
2015-08-10 22:27:36
學習和認知科學領域,是一種模仿生物神經網絡(動物的中樞神經系統,特別是大腦)的結構和功能的數學模型或計算模型,用于對函數進行估計或近似。神經網絡由大量的人工神經元聯結進行計算。大多數情況下人工神經網絡
2019-03-03 22:10:19
。雙模式智能機器人的設計:模式一、無人導航,加入模糊神經網絡的蔽障算法實現自動蔽障。二、遙控模式,基于無線遙控模塊(預計使用藍牙),完成遙控導航。4。硬件模塊預計主要會涉及:藍牙、超聲波雷達、直流電機
2016-10-20 15:50:35
是一種常用的無監督學習策略,在使用改策略時,網絡的輸出神經元相互競爭,每一時刻只有一個競爭獲勝的神經元激活。ART神經網絡由比較層、識別層、識別閾值、重置模塊構成。其中比較層負責接收輸入樣本,并將其傳遞
2019-07-21 04:30:00
人工神經網絡是根據人的認識過程而開發出的一種算法。假如我們現在只有一些輸入和相應的輸出,而對如何由輸入得到輸出的機理并不清楚,那么我們可以把輸入與輸出之間的未知過程看成是一個“網絡”,通過不斷地給
2008-06-19 14:40:42
人工神經網絡(Artificial Neural Network,ANN)是一種類似生物神經網絡的信息處理結構,它的提出是為了解決一些非線性,非平穩,復雜的實際問題。那有哪些辦法能實現人工神經網絡呢?
2019-08-01 08:06:21
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
簡單理解LSTM神經網絡
2021-01-28 07:16:57
清潔機器人是服務機器人的一種,所謂服務機器人是指自主或半自主的、從事非生產活動、能完成有益于人類健康的服務工作的機器人。家庭清潔機器人集機械、電子、傳感器、計算機、控制、機器入技術、人工智能等諸多
2019-09-05 06:56:37
列文章將只關注卷積神經網絡 (CNN)。CNN的主要應用領域是輸入數據中包含的對象的模式識別和分類。CNN是一種用于深度學習的人工神經網絡。此類網絡由一個輸入層、多個卷積層和一個輸出層組成。卷積層是最重
2023-02-23 20:11:10
本文設計了一種基于神經網絡控制算法的伺服運動控制卡。
2021-06-03 06:05:09
最近在學習電機的智能控制,上周學習了基于單神經元的PID控制,這周研究基于BP神經網絡的PID控制。神經網絡具有任意非線性表達能力,可以通過對系統性能的學習來實現具有最佳組合的PID控制。利用BP
2021-09-07 07:43:47
計的機器人是一種小型的車體,車體的前輪采用對稱的兩個輪子以及電機作為動力輸出,車體的后輪采用一個萬向輪作為輔助轉向輪。車體的前方安裝OV7725攝像頭,在車身的合理位置安放電機驅動、電池、主控芯片等。在
2018-04-20 10:53:09
計的機器人是一種小型的車體,車體的前輪采用對稱的兩個輪子以及電機作為動力輸出,車體的后輪采用一個萬向輪作為輔助轉向輪。車體的前方安裝OV7725攝像頭,在車身的合理位置安放電機驅動、電池、主控芯片等。在
2018-04-20 10:53:09
“狗”。深度學習主要應用在數據分析上,其核心技術包括:神經網絡搭建、神經網絡訓練及調用。CNN神經網絡訓練 機器視覺中的圖像預處理屬于傳統技術,包括形態變換、邊緣檢測、BLOB分析等。圖像在人眼和機器下
2018-05-31 09:36:03
,看一下 FPGA 是否適用于解決大規模機器學習問題。卷積神經網絡是一種深度神經網絡 (DNN),工程師最近開始將該技術用于各種識別任務。圖像識別、語音識別和自然語言處理是 CNN 比較常見的幾大應用。
2019-06-19 07:24:41
如何使用STM32F4+MPU9150去實現一種神經網絡識別手勢呢?其過程是怎樣的?
2021-11-19 06:38:58
原文鏈接:http://tecdat.cn/?p=5725 神經網絡是一種基于現有數據創建預測的計算系統。如何構建神經網絡?神經網絡包括:輸入層:根據現有數據獲取輸入的層隱藏層:使用反向傳播優化輸入變量權重的層,以提高模型的預測能力輸出層:基于輸入和隱藏層的數據輸出預測
2021-07-12 08:02:11
應用對象相結合后的系統,其是硬件和軟件緊密捆綁在一起的系統。將嵌入式系統應用于滅火機器人的設計中,對機器人的性能智能化、網絡化、小型化都有了明顯提高。比賽用滅火機器人需要機器人有智能較高的自動控制
2019-07-31 06:23:18
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。
2019-10-15 08:03:16
機器人不僅需要人工智能(AI)才能實現自主。他們還需要大量傳感器,傳感器融合以及邊緣的實時推理。之前我們已經嘗到了深度卷積神經網絡的好處,如今來自激光雷達的更高數據處理的需求正在推動神經網絡到新拓撲
2021-12-20 06:44:08
還沒有脫離原來的概念:今天的機器人是可編程的,他們需要感知自己的環境,來確保他們所做的事情和他們的計劃之間的合規性,他們需要在自己的環境中移動。那么什么推動機器人行業的發展呢?機器人技術作為一種行業
2019-04-16 10:07:33
小女子做基于labview的蒸發過程中液位的控制,想使用神經網絡pid控制,請問這個控制方法可以嗎?有誰會神經網絡pid控制么。。。叩謝
2016-09-23 13:43:16
一定的早熟收斂問題,引入一種自適應動態改變慣性因子的PSO算法,使算法具有較強的全局搜索能力.將此算法訓練的模糊神經網絡應用于語音識別中,結果表明,與BP算法相比,粒子群優化的模糊神經網絡具有較高
2010-05-06 09:05:35
(yaw-roll-roll-yaw-roll-yaw)與市面上大部分機械手機器人使用的相同。在伸展位置,Thor 高約 625 毫米,可以舉起高達 750 克的負載。該項目的主要目的是設計一種可用
2022-07-25 07:04:10
怎樣去設計一種基于PID算法的巡線機器人?基于PID算法的巡線機器人有哪些優勢?
2021-07-27 06:54:05
怎么設計一種室外移動機器人組合導航定位系統?如何實現室外移動機器人組合導航定位系統的硬件設計?如何實現室外移動機器人組合導航定位系統的軟件設計?
2021-04-19 10:50:33
各位大神,請問有沒有編過模糊PID控制程序或神經網絡控制程序?
2015-01-12 10:50:48
隱藏技術: 一種基于前沿神經網絡理論的新型人工智能處理器 Copy東京理工大學的研究人員開發了一種名為“ Hiddenite”的新型加速器芯片,該芯片可以在計算稀疏“隱藏神經網絡”時達到最高的精度
2022-03-17 19:15:13
神經網絡模糊系統及其在運動控制中的應用是一本關于人工神經網絡、模糊邏輯系統,以及模糊神經網絡研究成果的專著。作者在簡要介紹神經網絡理論與模糊理論的基礎上,對人
2009-01-13 15:18:34 0
0 基于神經網絡的信息收集機器人導航界面
Neural Network Based Navigation Interface for Robot of Information Collection
2009-03-16 15:18:077 模糊模式識別是模糊集理論研究中的重要方向,神經網絡是數據挖掘中的一種常用方法。超圓神經網絡的學習時間和網絡模型理解性都優于BP 神經網絡,它能以較少的數據量 蘊涵
2009-06-01 16:46:5320 模糊神經網絡提供了從人工神經網絡中模糊規則的抽取。本文研究模糊神經網絡的自適應學習、規則插入和抽取及神經-模糊推理的FuNN 模型。把遺傳算法作為系統模糊規則選擇的自
2009-06-06 13:45:4218 水位控制是工業鍋爐控制系統中一個重要的環節,其控制質量的優劣直接影響到鍋爐的安全和經濟效益。本文將一種基于模糊RBF 神經網絡的PID 控制器應用與工業鍋爐水位的控制
2009-06-09 09:13:0319 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-06-09 10:47:3617 利用一種改進的模糊神經網絡實現雙吊點閘門的同步控制。這種方法把模糊控制和神經網絡相結合進行控制系統的建模。與傳統的PID 控制方法相比,該控制方法具有自學習和自適應
2009-06-09 11:32:5516 為了對模型復雜的輪式地面機器人進行轉向控制,應用了模糊遺傳PID控制方法。先用模糊神經網絡建立車體模型,再用遺傳PID進行參數尋優,最后用優化參數控制機器人轉向。該方法能
2009-06-10 13:20:5026 介紹一種基于RBF 的模糊神經網絡設計與仿真分析的實現方法。該方法利用MATLAB 中的神經網絡工具箱圖形用戶界面GUI 結合模糊控制規則表給定的輸入/輸出樣本數據設計、構建RBF 模糊
2009-06-10 14:22:4928 設計了一種基于神經網絡結構的模糊控制器,并將它與PID 控制器相結合,動態的調整PID 參數。系統根據技術人員的經驗和知識,離線的進行學習,使得模糊神經網絡掌握調節PID 參
2009-06-15 09:39:3813 車輛牌照的自動識別是目標自動識別的一種重要形式。針對車牌識別的后期技術,即牌照識別技術做了研究并提出了一種新的車牌識別方法,該網絡由BP 神經網絡識別模塊和模糊控制
2009-07-08 15:38:1016 提出一種新的基于隨機模糊神經網絡的多傳感器狀態信息融合方法, 研究和比較了基于單值模糊神經網絡和基于隨機模糊神經網絡的雷達與紅外傳感器狀態信息融合。仿真結果表明,
2009-07-09 14:42:1610 本文提出了用于SCARA 機器人運動控制的自組織模糊聚類神經網絡控制器。該控制器基于模糊聚類方法在學習模糊規則之前先優化訓練數據,去除冗余數據并解決數據沖突問題,不但
2009-08-04 15:33:1823 移動機器人路徑規劃可分為兩種類型:(1)全局路徑規劃;(2)局部路徑規劃。本文分析了Kohonen神經網絡算法及其識別機理,提出了Kohonen神經網絡和BP神經網絡結合起來進行路徑規劃
2009-08-15 09:02:2913 本文首先分析了人工神經網絡和秘密共享的相通之處,闡明了用人工神經網絡來實現秘密共享是可能的;其次給出了一種基于人工神經網絡的秘密共享的門限方案,詳細介紹了
2009-08-15 09:54:1715 本文設計了一種基于自適應模糊神經網絡的變步長LMS算法,該算法采用了一種新的模糊控制規則,按照該規則改變LMS算法的步長。文章最后給出了非線性噪聲抵消的仿真結果。關
2009-08-27 11:42:577 針對中長期負荷預測,本文將模糊理論與神經網絡相結合,提出了基于高木-關野自適應神經網絡模糊推理系統的中長期負荷預測模型。該模型采取神經網絡技術對模糊信息進行處理
2009-12-18 16:48:046 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-12-19 11:50:0312 針對含有建模誤差和不確定干擾的多關節機器人軌跡跟蹤控制,提出了一種模糊神經滑模控制方法。該方法采用全局快速終端滑模面,保證了系統能夠從任意初始狀態在有限時間
2009-12-19 15:19:1312 機器人動力學控制由于其數學模型的不確定性,一直是困擾該領域的難題之一。本文研究了通過神經網絡逆系統方法實現機器人的解耦,然后在外環施加控制的新方法。文中對該
2010-01-11 16:54:2311 介紹了MATLAB軟件的仿真技術在神經網絡一模糊控制電冰箱的仿真研究中的應用,并用匯編語言編程實現了制冷目標溫度和制冷過程的模糊控制,以及神經網絡在預冷和化霜等智能控
2010-01-12 16:57:4234 本文提出了一種模糊神經網絡控制器,該控制器用于工業機器人關節驅動的位置控制,克服了傳統PID很難達到對非線性以及不確定因素的控制效果和簡單模糊控制不能完全消除穩態
2010-03-03 15:14:5783 模糊神經網絡在GPS高程轉換中的應用
摘要: 介紹了模糊神經網絡基本原理和GPS 高程轉換方法, 采用模糊神經網絡算法, 實現了GPS 高程轉換. 在用模糊神經網絡進
2010-04-26 11:27:2812 針對現有隧道照明存在的大量電能浪費,提出一種基于模糊神經網絡的隧道照明控制系統實現節能。將車速、車流量和洞外亮度做為系統的輸入,照明回路調光數值做為系統的輸出。系
2010-07-13 16:37:5012 詳細介紹了CMAC神經網絡結構" 中間層作用函數地址的計算方法" 輸出層權值的學習算法# 并利用CMAC神經網絡對水下機器人深度模糊控制器進行了學習$ 仿真結果表明% 訓練得到的
2010-07-22 15:49:5925
隨著智能信息技術的發展,模糊神經網絡算法廣泛應用于工業控制。但該算法尚未應用于PLC。針對這種現狀,給出基于S7-200 PLC的模糊神經網絡算法設計。利用模糊神經
2010-12-24 16:55:1949 在應用徑向基函數RBF(Radial Basis Function)神經網絡對機器人進行軌跡規劃時,為解決一般學習算法中收斂速度慢、學習精度不高的問題,提出一種混合學習算法。該方法根據軌跡規劃
2010-12-31 17:17:5118 運動控制 是人工神經網絡應用于機器人控制的重要內容。本文就人工神經網絡用于機器人運動學正解問題進行研究, 通過建立機器人運動學神經網絡模型, 給出了相應的BP 算法, 并對2R、
2011-06-28 11:04:3238 基于神經網絡的自主吸塵機器人混合視覺研究!資料來源網絡,如有侵權,敬請見諒
2015-11-20 15:34:540 基于粗神經網絡的仿人智能機器人的語音融合算法研究電子論文!資料來源網絡,如有侵權,敬請見諒
2015-11-30 11:34:244 基于人工神經網絡實現智能機器人的避障軌跡控制!資料來源網絡,如有侵權,敬請見諒
2015-11-30 11:33:3048 基于神經網絡信息融合的智能機器人!資料來源網絡,如有侵權,敬請見
2015-11-30 11:33:204 神經網絡在智能機器人導航系統中的應用研究!資料來源網絡,如有侵權,敬請原諒!
2015-12-25 09:35:598 基于模糊神經網絡的RoboCup足球機器人局部路徑規劃方法研究
2016-01-04 14:59:050 模糊系統、模糊神經網絡及應用程序設計-上科。
2016-04-11 17:14:030 模糊控制與神經網絡-北航,有需要的下來看看。
2016-04-11 17:33:160 本文將模糊控制與神經網絡相結合,設計一種基于模糊神經網絡的機器人位置控制系統,并將其運用到機器人軌跡跟蹤控制系統中,本系統中,立體定位系統作為主要數據輸入通道,用于精確獲取目標位置與機器人之間精確的相對位置。隨后將這些現場實時空間信息融入先前建立的空間模型。
2016-09-18 11:43:402373 本文將模糊控制與神經網絡相結合,設計一種基于模糊神經網絡的機器人位置控制系統,并將其運用到機器人軌跡跟蹤控制系統中,本系統中,立體定位系統作為主要數據輸入通道,用于精確獲取目標位置與機器人之間精確的相對位置。隨后將這些現場實時空間信息融入先前建立的空間模型。
2016-09-19 10:53:1832 傳統的機器人控制技術大多是基于模型的控制方法,無法得到滿意的軌跡跟蹤效果,模糊控制和神經網絡等人工智能的發展為解決機器人軌跡跟蹤問題提供了新的思路。普通模糊控制的控制規則大部分是人們的經驗總結.不
2016-09-22 11:15:3423 提出一種新的機器人視覺伺服控制方法,該方法參照人的抓取動作,首先根據物體在圖像中的位置信息,利用模糊邏輯將機器人的手爪移動到物體附近,然后再根據物體當前圖像和參考圖像之差,利用局部神經網絡對手爪的位姿進行精確調整。整個過程無需機器人和攝像機的標定,能有效利用人的控制經驗。
2016-09-22 11:15:3416 移動機器人編隊的神經網絡滑模控制_朱玲
2017-01-07 17:16:230 提出含慢、快變控制項的組合控制器。對于慢變子系統,設計一種無需模型的模糊徑向基函數( RBF)神經網絡(FRBFNN)自適應跟蹤控制方案,利用神經網絡觀測器估計關節角速度信息,并對系統的未知非線性函數進行逼近;對于快變子系統,采用
2017-12-11 14:11:310 模糊神經網絡就是模糊理論同神經網絡相結合的產物,它匯集了神經網絡與模糊理論的優點,集學習、聯想、識別、信息處理于一體。
2017-12-29 14:40:4050582 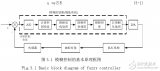
模糊神經網絡是將人工神經網絡與模糊邏輯系統相結合的一種具有強大的自學習和自整定功能的網絡,是智能控制理論研究領域中一個十分活躍的分支,因此模糊神經網絡控制的研究具有重要的意義。本文旨在分析模糊神經網絡的優缺點及其用途。
2017-12-29 15:35:3328275 神經網絡控制系統又成為模糊控制系統,是個新興的控制方法,就象我們說小明學習很好,但是怎么個好法就是個很模糊的概念。模糊控制不同與經典控制理論的關鍵在于他有一套屬于他自己的模糊算法,這個對數學的要求還是挺高的,模糊控制也成做為智能控制系統。
2018-01-02 14:47:299053 
網絡中心機房的溫度是大延時、大慣性的被控對象,針對此特點,以模糊控制和神經網絡結合的思想,設計了一種基于模糊神經網絡的控制器。建立了以T-S模糊模型為基礎的5層模糊神經網絡結構,并采用改進的BP算法
2018-01-09 16:04:090 生物的諸多技能是在生物個體的生長發育過程中逐漸形成和發展起來的,能否賦予機器人這樣一種特性呢?為此,本文基于BP神經網絡為機器人建立起一種類似生物的感覺運動系統,使機器人與外界環境之間交互作用,產生
2018-01-09 16:46:481 、強耦合、時變的復雜大系統,它要受到多變的外部環境、受控對象的不確定性、作物形態、尺寸不斷變化的影響.針對模糊控制和神經網絡控制的優缺點,本文將模糊理論的知識表達與神經網絡的自學習能力有機地結合起來,采用快速的學習算法,提出了一種模糊神經網絡控制方案。
2018-12-28 08:08:006806 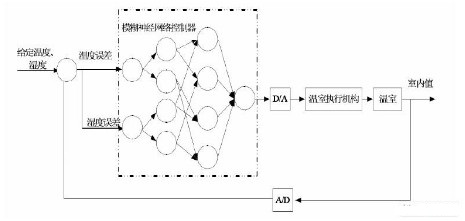
膠囊網絡是 Geoffrey Hinton 提出的一種新型神經網絡結構,為了解決卷積神經網絡(ConvNets)的一些缺點,提出了膠囊網絡。
2019-02-02 09:25:006526 研究團隊設計了以寬度神經網絡為主體的微型機器人基本運動控制器;基于李雅普諾夫穩定理論,推導了保障機器人運動穩定的控制器網絡參數約束,簡化了不同運動基元的控制器參數訓練學習過程。
2023-05-30 10:21:45657 
深度神經網絡是一種基于神經網絡的機器學習算法,其主要特點是由多層神經元構成,可以根據數據自動調整神經元之間的權重,從而實現對大規模數據進行預測和分類。卷積神經網絡是深度神經網絡的一種,主要應用于圖像和視頻處理領域。
2023-08-21 17:07:365026 人工神經網絡和bp神經網絡的區別? 人工神經網絡(Artificial Neural Network, ANN)是一種模仿人腦神經元網絡結構和功能的計算模型,也被稱為神經網絡(Neural
2023-08-22 16:45:186057 人工神經網絡(Artificial Neural Networks,簡稱ANNs)是一種受生物神經網絡啟發而產生的數學模型,用于模擬人腦處理信息的方式。它由大量的節點(或稱為神經元)相互連接而成
2024-07-04 16:57:432435 ,雖然在某些應用場景下取得了較好的效果,但在面對復雜、不確定和動態變化的環境時,其性能往往受到限制。神經網絡作為一種模擬人腦神經元網絡的計算模型,具有強大的非線性映射能力和自適應學習能力,被廣泛應用于機器人控制領域
2024-07-09 09:40:011648 機器人神經網絡系統是一種模擬人類大腦神經網絡的計算模型,具有高度的復雜性和靈活性。在本文中,我們將詳細介紹機器人神經網絡系統的特點,包括其結構、功能、優勢和應用等方面。 一、引言 神經網絡是一種受人
2024-07-09 09:45:471409 神經網絡控制是一種利用人工神經網絡對復雜系統進行建模和控制的方法。它在許多領域得到了廣泛的應用,如工業自動化、機器人技術、航空航天、生物醫學工程等。 一、引言 1.1 神經網絡的基本概念 神經網絡
2024-07-09 09:47:231550
 電子發燒友App
電子發燒友App

















 工商網監
工商網監
評論