 電子發燒友App
電子發燒友App



作者:曹勇 曹永輝 黃橋高 屈毅林 潘光
海洋覆蓋著地球表面的71%,據不完全統計,海洋中的魚類超過1.2萬種。LINDSEY根據不同推進部位將魚類推進模式分為2大類:身體或尾鰭推進(BCF)、中央鰭或對鰭推進(MPF)。根據已有的生物學信息可知:自然界中85%的魚類以BCF模式游動。基于BCF模式游動具有快速性、高效性,同時,存在著穩定性不佳、低速時效率較低等缺點。基于MPF模式游動的魚類由成對的胸鰭、背鰭、臀鰭的拍動或波動產生推力。近年來,基于MPF模式游動的魚類以其優異的機動性和穩定性逐漸受到科研工作者的關注。 ?
蝠鲼,又被稱為魔鬼魚,是一種典型的基于MPF模式游動的魚類,屬于脊索動物門、軟骨魚綱、燕魟目、蝠鲼科、蝠鲼屬;其頭側有一對向前突出的由胸鰭分化的頭鰭,胸鰭呈翼狀,尾細且具尾刺。蝠鲼的身體部分扁平,呈菱形,具有一對尺寸較大而且運動較為靈活的近三角形的胸鰭。蝠鲼在運動過程中,胸鰭基部變形較小,而胸鰭遠端因為不受身體的約束,會產生較大的變形,這種柔性變形是其推力產生的主要來源。蝠鲼的運動效率較大程度上依賴于胸鰭的柔性變形。蝠鲼在游動時,僅需拍動胸鰭即可實現矢量推進的效果,蝠鲼擁有如此高超的巡游能力離不開其獨特的運動系統。蝠鲼除了具有高效的巡游能力之外,還具有較高的機動性,其具體表現為:低速巡游過程中的快速轉彎、高速巡游過程中的懸停以及懸停過程中的原地翻轉等。
一水下仿生撲翼機器人的驅動與樣機研究
自然界中,牛鼻鲼、蝠鲼、鷹嘴鰩等的推進方式為擺動推進;黃貂魚、尼羅河魔鬼、南美刀魚等的推進方式為波動推進。相比于BCF模式,MPF模式具備更強的穩定性和機動性。隨著仿生機器魚領域研究的不斷深入,MPF模式逐漸成為仿生機器魚領域的研究熱點。國內外很多研究機構根據MPF模式的運動特點陸續開發出多款仿生機器魚。
⒈擺動推進的仿生胸鰭結構
2008年,德國FESTO公司、EvoLogics公司與柏林科技大學3家單位合作開發了一款名為AquaRay的仿蝠鲼機器魚,如圖1所示。該機器魚采用無刷電機驅動的水泵為2對液壓裝置提供動力,并通過線繩驅動胸鰭骨架上下撲動。該機器魚還在胸鰭結構中采用了FinRay結構,可以使仿生胸鰭的運動形態與真實生物更加貼合。利用位于鰭尖的單臺舵機使胸鰭產生弦向扭轉變形,從而產生推進力。同時,利用尾鰭實現上浮下潛運動。 ?
該機器魚可以實現以0.5m/s的速度進行游動。2010年,ZHOU等人開發了一款名為RoMan-II的仿蝠鲼機器魚。該機器魚采用多個獨立電機驅動,并列兩側的胸鰭由3根獨立的柔性鰭條驅動,每根鰭條都有單獨的驅動源提供動力,機器魚的升沉運動采用類似魚鰾的給排水裝置進行控制,可實現最大0.3m/s的水下巡游速度。2016年,CHEW等人研制了一款采用單鰭條驅動的仿生蝠鲼機器魚。該機器魚單側胸鰭的展長為194mm,最大弦長為200mm,鰭條位于仿生胸鰭的最前端,鰭面其余部分為柔性橡膠材料。通過舵機驅動單鰭條使柔性鰭面變形進而為機器魚提供推力。同時,研究人員還針對不同厚度柔性胸鰭的推進效果進行了實驗研究,發現該機器魚最快可以達到0.5m/s的游動速度,約為體長的1.78倍。 北京航空航天大學機器人研究所的畢樹生等人自2007年起,做了大量MPF模式的仿生魚研究,研制了五代樣機(RoboRay系列),其中,游動速度最快可以達到0.9m/s。樣機多采用多電機帶動多鰭條的胸鰭結構形式,在運動形態和整體結構上,仿生機器人與自然界中真實蝠鲼的相似度已逐漸提高。2011年,國防科技大學楊少波等從仿生學層面系統地開展了牛鼻鲼胸鰭推進模式的研究,研究團隊基于流固耦合的方法分析了牛鼻鲼胸鰭推進時的水動力學特性,并研制了一款名為CownoseRay的仿牛鼻鲼機器魚,如圖2所示。 ?
團隊通過樣機的航行實驗研究了不同的運動參數下潛水器的推進性能,該機器魚可以在1Hz的撲動頻率下以0.18m/s的速度游動。2022年,中國科學院的喻俊志等研制了一款后掠角可變的MPF仿蝠鲼機器魚。該機器魚展長723mm,最大弦長381mm,最大可以實現每秒1.07倍體長的游動速度,基于后掠角可變的胸鰭結構,該機器魚的機動性得到了大幅的提升,可實現快速的俯仰機動,其半徑為205mm。同時,研究團隊針對該樣機提出了基于準穩態方法的動力學模型。同年,洛桑聯邦理工的SUN等通過多個齒輪泵構建了柔性致動器,可產生最大約25N·m的力矩,并在此基礎上開發了一款胸鰭推進的仿生機器魚。該樣機展長1.93m,其撲動頻率達到了0.5Hz,游動速度約0.29m/s。該機器魚的驅動方式為設計工程實際中所需求的大尺度軟體機器人提供了新的研究思路。西北工業大學的曹勇等采用單舵機驅動單根鰭條、多臺舵機驅動并聯多根鰭條、雙驅動帶動多連桿等結構方式開發了多臺仿蝠鲼機器魚,如圖3所示。其研發的翼身融合水下滑翔工程樣機完成了多次湖、海試驗工作,并實現了最大1025m的下潛深度,是目前國內外唯一具備大深度水下工作能力的仿生潛水器。 ? 根據以上列舉的研究成果,可以發現,擺動推進的仿生機器魚在航行性能以及與生物的相似程度在逐步提升,同時也逐漸從實驗室研究階段走向工程應用階段,具備較好的應用前景。擺動推進的仿生機器魚展弦比通常處于1~2之間,因此兩側胸鰭在存在推力差時,對于轉彎機動性有較為明顯的提升,尤其是在機器魚處于低速巡游情況下。但擺動推進的機器魚存在縱向穩定性差的問題,這主要是因為胸鰭撲動過程中產生的水動力是周期性變化的,這也對胸鰭驅動結構設計以及運動控制提出了新的挑戰。
⒉波動推進的仿生胸鰭結構
HU等參照“尼羅河魔鬼”(Gymnarchus Niloticus)的長條狀背鰭,開發了一款名為RoboGnilos的波動仿生鰭裝置。該樣機由并列排布的9臺舵機驅動,每臺舵機帶動獨立鰭條,鰭條間通過柔性薄膜進行連接,通過調節舵機之間的相位差可以實現柔性薄膜波動波長的調節,該裝置可以達到約0.35m/s的游動速度。CURET等參照南美刀魚的腹鰭,開發了一款名為Robotic Knifefish的仿生波動鰭裝置。該裝置由并列排布的32臺舵機驅動,由于該裝置驅動數目的增加,在運動過程中胸鰭可以產生連續性更好的行波。CURET利用DPIV方法,對裝置的波動傳遞方式差異引起的渦結構、推力以及側向力變化進行了分析。結果表明,該裝置產生的最大射流速度可達0.5m/s、最大升力可達0.4N。 LIU等同樣參照南美刀魚的腹鰭,開發了一款可自主游動的仿生波動鰭機器魚,如圖4所示。該機器魚采用單驅動形式,在波動鰭前緣,由一臺連續轉動的電機驅動曲柄搖桿機構往復運動,并帶動柔性鰭面運動。由于該機器魚僅在前緣進行驅動,鰭面的波動呈現由前緣至后緣振幅逐漸衰減的趨勢。相較于多驅動結構的波動鰭裝置,單驅動結構由于完全依賴鰭面的被動變形,因此不會產生額外的運動消耗,在推進能耗上有大幅下降,但逐漸衰減的波動振幅也限制了機器魚推進能力的進一步提升。經測試,該機器魚可達到約0.25m/s的游動速度。LIU等人開發了一款名為KnifeBot的仿生波動鰭機器魚,該機器魚可實現最大約0.35m/s的游動速度。該機器魚由并列排布的16臺舵機驅動,通過調節舵機相位差調節鰭面波長以及波動傳遞方向,其利用DPIV方法對該機器魚的不同波動傳遞方式進行了研究,得益于該機器魚的自主游動能力,除游動速度外,還可獲得不同波長、撲動頻率對俯仰角、橫滾角、偏航角的影響規律。
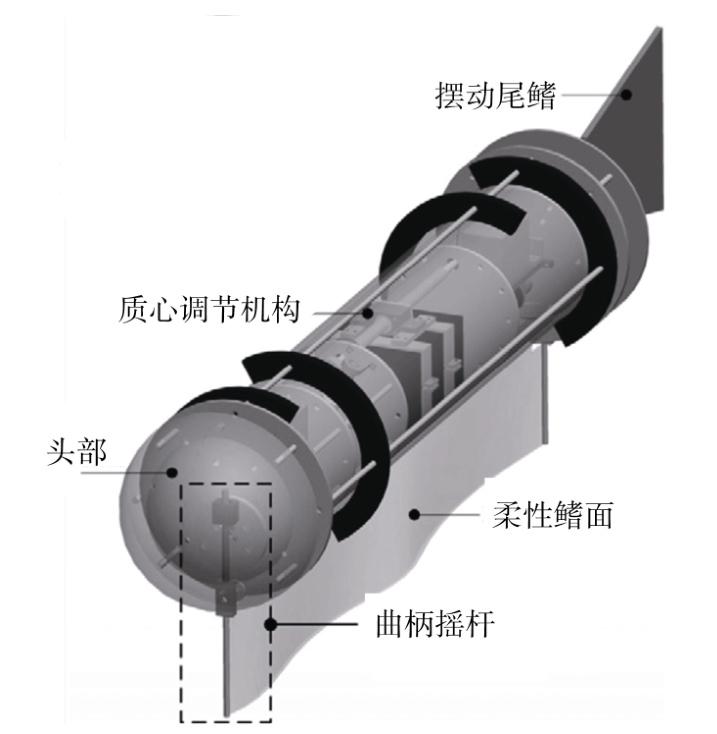
圖4 仿刀魚波動鰭機器魚
國防科技大學與PliantEnergySystems公司分別開發了2款可實現水陸兩棲的仿生波動鰭機器人,如圖5所示。二者分別采用橡膠以及硅膠作為鰭面材料,其中,由于前者鰭面材料硬度更高,使得其可在水下、沙地、冰面以及雪地等多種地形條件下實現快速運動,后者爬行速度約為0.1m/s,游動速度為0.3m/s。
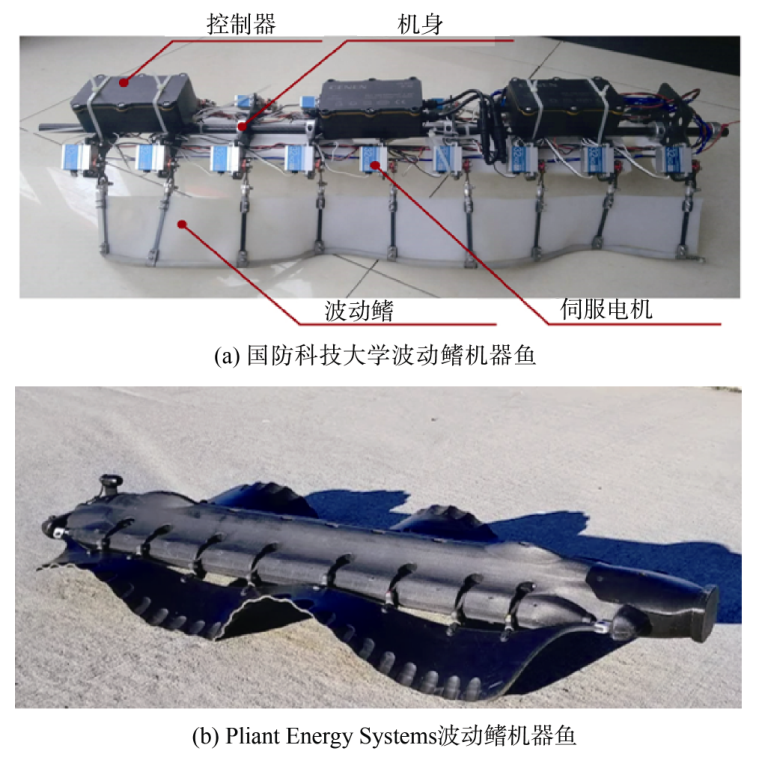
圖5 水陸兩棲仿生波動鰭機器魚
根據以上列舉的研究成果,可以發現,波動推進的仿生魚逐漸脫離了仿生對象的束縛,從單波動鰭過渡到多波動鰭,并利用波動傳遞的特性,使波動鰭機器魚具備了水–陸兩棲的功能,具備較好的應用前景。波動推進的仿生機器魚展弦比通常處于小于1,且鰭面存在的無量綱波數大于1,這就使得其產生的推力是連續的,因此也具備更好的穩定性。但波動推進機器魚由于采用多個驅動裝置,且驅動裝置之間通過柔性材料連接,在運動過程中會存在運動和變形相互制約,相互影響的情況,因此功耗較高,對能源系統提出了新的挑戰。
⒊采用軟體驅動器的胸鰭推進機器魚
軟體驅動器是指全部或部分由柔性材料制成、能夠實現連續變形的驅動器,相比于傳統剛性驅動器,其具備極高的運動自由度和極強的環境適應性,還可實現自組裝、自修復、自感知等功能,在胸鰭推進的仿生機器魚領域有巨大的應用空間。已經研制的胸鰭推進式軟體機器魚所采用的驅動方式包括:氣動、形狀記憶合金(SMA)、離子聚合物–金屬復合材料(IPMC)、介電彈性體驅動(DEA)和生物融合驅動。 氣動指在軟體結構中充入氣體,通過改變氣體體積或內部壓力,使結構產生運動與變形的一種驅動方式。日本岡山大學SUZUMORI等及北京航空航天大學CAI等都先后研制了胸鰭推進的氣動軟體機器魚。2022年,CHI等采用氣動驅動并結合多穩態結構成功研制了胸鰭推進的蝶泳式機器魚,游動速度可達每秒3.74倍體長,是目前世界上游動最快的軟體機器魚。氣動具有驅動力強、運動靈活等優勢;其發展較早且十分成熟,但通常需要外接氣源,因此不適用于無纜的自主游動。 基于SMA材料驅動器的基本原理是:通過電流、光照等方式加熱使SMA產生相變,同時產生變形。KIM等研發了一種基于SMA驅動的仿生海龜。WANG等[99]設計研究了一種基于SMA驅動的擺尾機器魚和仿蝠鲼機器魚。基于SMA的驅動器具有驅動力大、變形量大等優勢;但由于其散熱較慢,驅動后較長時間才能夠恢復至初始狀態,導致驅動頻率較低。 IPMC是一種電活性聚合物材料(EAP)。在IPMC的電極兩端施加電壓時,水合陽離子在電場作用下移向負極,負極產生拉伸變形,同時,正極發生收縮變形,材料整體則發生彎曲變形。HUBBARD等將IPMC應用于仿生機器魚胸鰭和尾鰭的驅動設計。SHEN等通過模仿海豚的游動方式,使用IPMC研發了一款仿生機器魚,并研究了其水動力性能。弗吉尼亞大學的研究者基于IPMC驅動研發了一款仿生蝠鲼機器魚,該機器魚的胸鰭由兩側的IPMC鰭條驅動,身長80mm,翼展180mm,最大游動速度為4.2mm/s。IPMC具有變形靈活、位移大、驅動電壓低、響應速度快等優點。由于其驅動需要液體環境,因此IPMC與機器魚適配性強。但IPMC仍存在輸出力度小、響應頻率低等不足,在實現復雜運動和高效控制方面仍面臨一些挑戰。 以介電彈性體薄膜結構為例,可以對DEA的驅動原理進行簡單說明:在介電彈性體薄膜上下兩側的電極上施加電壓,介電彈性體薄膜在Maxwell應力的作用下發生變形,例如薄膜厚度減小,橫向產生擴張等。近期,LI等研制了介電彈性體驅動的仿生獅子魚,完成了馬里亞納海溝的深海驅動實驗,并實現了全局視覺下軟體機器魚集群運動實驗。介電彈性體驅動器具有極高的能量密度和良好的頻率響應特性,在許多領域都有著廣闊的應用前景。但由于其機理復雜,在設計仿生運動時仍有很大挑戰。 生物融合驅動指:將生物材料如動物肌肉組織作為驅動器整合到軟體機器人系統中,使其針對外界刺激(如電場、光刺激等)做出反應的一種驅動方式。2016年,PARK等利用大鼠心肌細胞研制了一種生物融合驅動的黃貂魚機器人,所研制的機器人能夠通過光趨近進行導航。2022年,ZHANG等成功研制了一種肌肉組織驅動的仿蝠鲼機器人,其僅由一塊肌肉組織驅動就可以實現有效推進。生物融合驅動的生物兼容性強,能對外界刺激(光信號、電場等)做出反應,但其制備困難,對環境要求高,該領域的研究目前仍處于起始階段。 除此之外,軟體驅動還包括燃燒(化學驅動)、電液壓驅動等驅動方式。其中,燃燒能夠在短時間內爆發大量能量,但二次驅動效果差,在彈跳機器人、跨介質機器人領域應用廣泛。針對軟體機器魚的設計而言,不難看出,化學驅動在快速逃逸、躍出水面等研究方向具備巨大潛力。2018年,ACOME等提出的HASEL驅動器(HASEL Actuator)是一類典型的電液壓驅動器,能夠實現拉伸、彎曲、旋轉、扭轉等多種運動及變形形式。其能量密度高、輸出能力強、易于快速制備,在設計具備復雜仿生運動能力的胸鰭推進軟體機器魚方面具備廣闊的前景。 根據以上所列舉的研究成果,可以看出,大部分研究工作主要關注具體軟體驅動機理,所研制的機器魚樣機運動形式單一、操控性差,難以實現復雜仿生運動。在撲翼軟體機器魚的研究過程中,還面臨著許多挑戰:例如,在驅動器層面,如何設計和研制能夠滿足胸鰭推進特性的軟體驅動器;在系統層面,如何根據魚類胸鰭運動變形特性,采用一種或多種軟體驅動方式設計具備復雜仿生運動能力的仿生胸鰭推進系統;在運動控制層面,如何根據軟體驅動器驅動特性設計運動控制系統,實現復雜仿生運動控制。總而言之,在運動效果和應用能力方面,與傳統機器魚相比,軟體機器魚仍有較大的提升空間。
二水下仿生撲翼機器人的控制研究
本節根據水下撲翼機器人的控制目標,將水下撲翼機器人的控制研究內容分為以下幾大類:①撲翼驅動控制;②俯仰與深度控制;③轉彎與航向控制;④路徑點與路徑跟蹤;⑤避障與自主游動;⑥基于相似度的運動參數優化。針對以上研究內容,本節主要闡述面向不同控制任務的控制要求與難點,討論不同控制器對同一控制目標的應用特點,為水下撲翼機器人的控制器設計提供參考。
⒈撲翼驅動控制
水下撲翼機器人的游動借助成對撲翼的拍動或波動,通過撲翼運動過程中與水的相互作用,推進自身游動。目前,撲翼驅動控制的方法要有基于運動學模型的方法、基于動力學模型的方法以及基于中央模式發生器(CPG)的方法等。 針對基于運動學模型的方法,LOW等利用模型的運動學方程,導出了2種形式的多鏈機器魚步態規劃的一般解,該解被用作六鏈體尾鰭式機器魚、八鏈胸鰭式機器魚游動試驗的步態控制輸入,實現了對RoMan-III兩側柔性胸鰭的驅動,實驗表明其開環游動的最大速度為0.45m/s。WU等提出了一種基于連桿機構的新型仿蝠鲼機器人,作者對連桿機構的運動學模型進行了分析,并進行了仿生機器人的水下實驗,其胸鰭的運動軌跡與蝠鲼胸鰭的運動軌跡相近。LIU等對仿蝠鲼機器人進行了運動學和水動力學的仿真分析,并在水池中進行了測試,該機器人能通過改變兩側胸鰭的幅值實現簡單的橫滾和俯仰運動,從而實現游動和轉向。WANG等提出了一種基于波動式胸鰭的仿蝠鲼機器人,并對波動式胸鰭的運動學模型進行了分析,實現了前后游動、俯仰、轉彎3個基本動作并進行了評價。 針對基于動力學模型的方法,CAI等、MENG等建立了仿生胸鰭的簡化水動力學模型,測試了所設計的胸鰭機構及仿蝠鲼機器人的運動性能,但仿真結果與實驗結果之間仍有明顯的誤差。目前,由于剛體與柔性耦合變形的水動力分析十分復雜,建立一個精確的胸鰭動力學模型是非常困難的。因此,基于動力學模型的驅動控制方法仍然較少。 基于目前的情況,更加穩定、可靠且無需節奏信號反饋的CPG方法開始被大量運用。CAI等開展了仿蝠鲼機器魚的CPG多運動模態協調控制研究,進行胸尾鰭結構的驅動,實現了撲動前游、倒游、原地轉彎等運動姿態;ZHANG等設計了一個CPG模型,實現了仿生機器魚的多模態機動運動,實驗表明利用胸尾鰭一體化推進機構,機器魚可以更穩定、更高效地進行靈活的機動游動;CAO等改進了基于相位振蕩器的CPG模型,引入了空間與時間上的非對稱效應,完成了對多鰭條胸鰭結構的驅動,并進行實驗測試了其運動性能。
⒉俯仰與深度控制
上浮與下潛2種運動狀態是水下撲翼機器人完成深度控制的基礎。水下撲翼機器人機械機構設計的差異會導致其實現2種運動的方式不同。例如,只擁有浮力系統的機器人可以在速度為零的情況下實現運動深度的改變,而只擁有重心調節機構的機器人則需要在機器人具備一定前游速度的基礎上,通過調節重心位置改變俯仰力矩,進而改變俯仰角,最后實現運動深度的調節。同時,擁有可上下偏轉的尾鰭的機器人也可以在具備一定的前游速度的基礎下通過調節尾鰭的偏置角度改變運動的深度。當尾鰭向上偏置時,尾部受到的力會使得機器人產生抬頭力矩,機器人呈現上浮運動狀態,進而運動深度變小;當尾鰭向下偏置時,尾部受到的力會使得機器人產生低頭力矩,機器人呈現下潛運動狀態,進而運動深度變大。
由于尾鰭具有不占用額外的艙內空間、且結構設計相對簡單的優點,因此在進行水下撲翼機器人設計時,小尺寸樣機通常只包含尾鰭機構,而大尺寸樣機通常同時包含重心調節機構與浮力系統。 針對水下撲翼機器人深度控制,研究人員以盡量快速的按照平滑軌跡到達某一固定深度,并保持在這一深度游動為目標開展了相關研究。NIU等通過調節尾鰭的偏轉角度,采用基于模糊邏輯的方法實現了機器人的深度控制,并通過實驗驗證了基于模糊邏輯的深度控制方法的有效性;WANG等通過實驗研究了“RobCutt-I”的運動速度與波形傳動的運動學參數之間的關系,包括向前/向后游泳、潛水/上升和轉彎3個運動狀態,在此基礎上提出了將自抗擾控制(ADRC)與模糊策略相結合的混合控制,以實現深度和航向的閉環控制;德國EvoLogicsGmbH公司與呂貝克應用科學大學研制的MantaRayAUV包括2個噴氣發動機、4個垂直推進器、2個機翼伺服系統、2個扭轉機翼伺服系統和1個尾部伺服系統,這種配置使得它具備動態深度控制能力,可以實現高精度的深度保持控制,同時具備迅速完成潛水或爬升動作的能力;CAO等設計了一種仿牛鼻鲼機器人Robo-ray,通過2個尾鰭來實現該機器人的控制深度,基于CPG-模糊算法提出了開環速度控制、閉環深度控制和航向控制方法。閉環實驗結果表明,機器人的深度控制誤差小于6.1cm,航向控制誤差小于6°;XIE等考慮到未知的動力學和外部環境干擾,設計了一個基于CPG的經典高木–關野(Takagi-Sugeno,T-S)模糊神經網絡控制器用于仿蝠鲼機器人的航向和深度控制,并通過水池測試驗證了控制器的有效性,其深度跟蹤和航向跟蹤控制誤差分別為±6cm和±6°;HE等為了提高仿蝠鲼機器人的深度跟蹤能力,考慮仿蝠鲼機器人的縱向運動特性,設計了一個基于非對稱輸出S平面的深度控制器。最后,通過水池實驗驗證了仿蝠鲼機器人深度控制器的可行性和可靠性。實驗結果表明,深度控制誤差在±5cm以內。
⒊轉彎與航向控制
水下撲翼機器人的撲翼在撲動過程中的波動,可以簡單地分解為弦向的波動和展向的波動。水下撲翼機器人主要通過3種方式進行轉彎:兩側非對稱振幅方式和兩側鰭條間非對稱弦向相位差方式,以及非對稱振幅和非對稱相位差結合的方式。 基于非對稱振幅的轉彎方式,一側撲翼的撲動振幅大于另一側,撲動振幅較大的一側產生更大的推進力,導致兩側撲翼的推進力不同,形成轉彎力矩,從而使機器人轉向振幅小的或無拍動振幅的一側,實現航向的調整。基于非對稱振幅的轉彎模式具有較慢的轉彎角速度和較大的轉彎半徑,因此該方法適用于小范圍內的航向調整。 基于非對稱相位差的轉彎方式,撲翼的波動傳遞方向或快慢不同,因此兩側撲翼的推進力大小不同,形成一個大的轉彎力矩。該轉彎方式主要用于快速響應時的機動轉向。因此,基于非對稱相位差的轉彎模式適用于轉彎角速度快、轉彎半徑小的大航向調整。 航向控制的主要任務是通過調節兩側胸鰭非對稱振幅及相位差,使機器人的實際航向趨近于期望航向。
基于上述目標,WANG等提出了一種ADRC與模糊控制策略相結合的混合控制方法來進行航向控制,該方法在實驗樣機RobCutt-I、RobCutt-II上進行了實驗,設定航向從70°調整到210°,穩定時間約為12s,且超調量較小。針對單一依靠非對稱振幅及相位差進行航向調整存在的問題,HAO等結合2種轉彎方式的特點,利用非對稱相位差快速調整航向,利用非對稱振幅精確調整航向,實現了閉環航向控制。通過航向干擾實驗,驗證了2種轉彎方式結合比單一方式更有效,并通過矩形軌跡游動實驗驗證了該機器人在2種轉彎方式結合下的機動性。此外,非對稱振幅可以提前改變預期的相位差,確保輸出的平穩過渡,實現快速準確的調整。針對上述航向控制方法精度不高的問題,XIE等提出了一種將CPG和基于T-S模糊神經網絡(NN)的控制相結合的控制方案,該方法基于實驗數據構建航向數據集,并使用相應的數據集完成對所建立的T-S模糊神經網絡的訓練,提出了基于CPG網絡的航向控制器,其中參數由T-S神經網絡獲取,最后,實驗結果表明該仿蝠鲼機器人的航向控制誤差為±6°,航向控制精度有所提高,驗證了該控制器的有效性和魯棒性。 HE等以仿蝠鲼機器人在航向角變化較大的情況下實現良好的航向跟蹤效果為目標,結合模糊控制器和航向過渡目標值函數,基于S平面控制方法設計了仿蝠鲼機器人的航向控制器,最后,通過水池實驗驗證了蝠鲼機器人航向控制器的可行性和可靠性。實驗結果表明,航向控制誤差在±5°以內,與經典S面航向控制器相比,改進S面航向控制器的超調量較小,且航向切換后的誤差較小。
⒋路徑點與路徑跟蹤
根據不同的控制目標,跟蹤問題可分為路徑點跟蹤和路徑跟蹤。路徑點跟蹤的含義為機器人經過一系列給定的路徑點游動,路徑跟蹤的含義為機器人按照制定的最優幾何參考路徑游動。 在運用路徑規劃算法規劃好一條從起點到目標點的最優路徑后,機器人從起點出發,按照某種控制規律進行運動,到達該最優路徑并實現對其的跟蹤。如何讓機器人跟蹤該最優路徑,是路徑跟蹤需解決的關鍵問題。路徑跟蹤的實質是通過控制水下機器人的運動來減少機器人與參考軌跡之間的空間誤差。若考慮軌跡跟蹤,則需包含時間上的誤差。然而,水下撲翼機器人的模型不確定性和來自波浪和水流等環境的干擾在很大程度上影響著機器人的運動控制性能,進而影響跟蹤精度。 針對上述路徑點跟蹤問題,BI等提出了一種路徑點跟蹤控制系統,該系統包括2層:速度控制層和航向控制層。速度控制層基于實驗樣機與路徑點的距離調節機器人的最大撲動振幅,航向控制層采用模糊控制方法來獲得轉向運動的轉向因子。 為了驗證控制系統的有效性,進行了路徑點跟蹤實驗,實驗結果表明,在任意設置路徑點或隨機給定路徑點的情況下,實驗樣機均能自主游動到達目標區域;WANG等提出了基于有限狀態機(FSM)的視線(LOS)制導系統的路徑點跟蹤方法,基于RobCutt-I實現了6個路徑點的跟蹤。 針對上述路徑跟蹤問題,WANG等提出了一種用于三維點跟蹤的切換控制方法,并設計了一個模擬實際水下作業過程的實驗。實驗結果表明,RobCutt-II能夠跟隨參考路徑,且最大交叉軌跡誤差為0.1m。隨后,在該方法的基礎上進行改進,提出了一種將視覺系統與反步控制相結合的路徑跟蹤方法。仿真和實驗結果表明,RobCutt-II能夠在水下空間中自主地沿著直線和圓形路徑游動。此外,與傳統比例–積分–微分(PID)方法相比,該方法減小了軌跡交叉誤差,軌跡跟蹤效果更加理想。同時,由于采用了航向補償,該方法具有較強的抗干擾能力。
⒌避障與自主游動
水下撲翼機器人的高機動性使它們能夠在復雜和狹窄的環境中工作。同時,自主工作的前提條件是機器人能夠自主檢測和避開障礙物。目前,水下撲翼機器人大多采用紅外傳感器、超聲波、攝像頭進行障礙物的檢測。ZHANG等綜合昆蟲翅膀和魚鰭的優點開發了一款仿生機器魚,其頭部安裝了3個對前的紅外傳感器,包括上前、中前、下前3個方向,利用3個紅外傳感器的信息作為CPG網絡的反饋,機器人可以通過改變步態或動作來避開障礙物,實現自主游動。Festo公司仿生學團隊設計Bionic FinWave的靈感來自于波浪狀鰭魚類的運動,該自主水下機器人能夠與外界進行無線通信,并將傳感器記錄的溫度和壓力值等數據傳輸到電腦上。此外,機器人前部還裝有壓力傳感器和超聲波傳感器以不斷地測量其與障礙物之間的距離,從而防止其與障礙物發生碰撞。 XIE等針對仿蝠鲼機器人自主游動的問題,在利用胸鰭相位差進行左右轉的基礎上引入飽和函數,使得機器人能夠根據障礙物的距離改變轉彎的速度。YANG等針對已知結構化環境下的繞池壁自主游動問題,采用基于CPG、模糊控制與策略的控制方法,完成了仿蝠鲼機器人的水池繞壁自主游動。
⒍基于相似度的運動參數優化
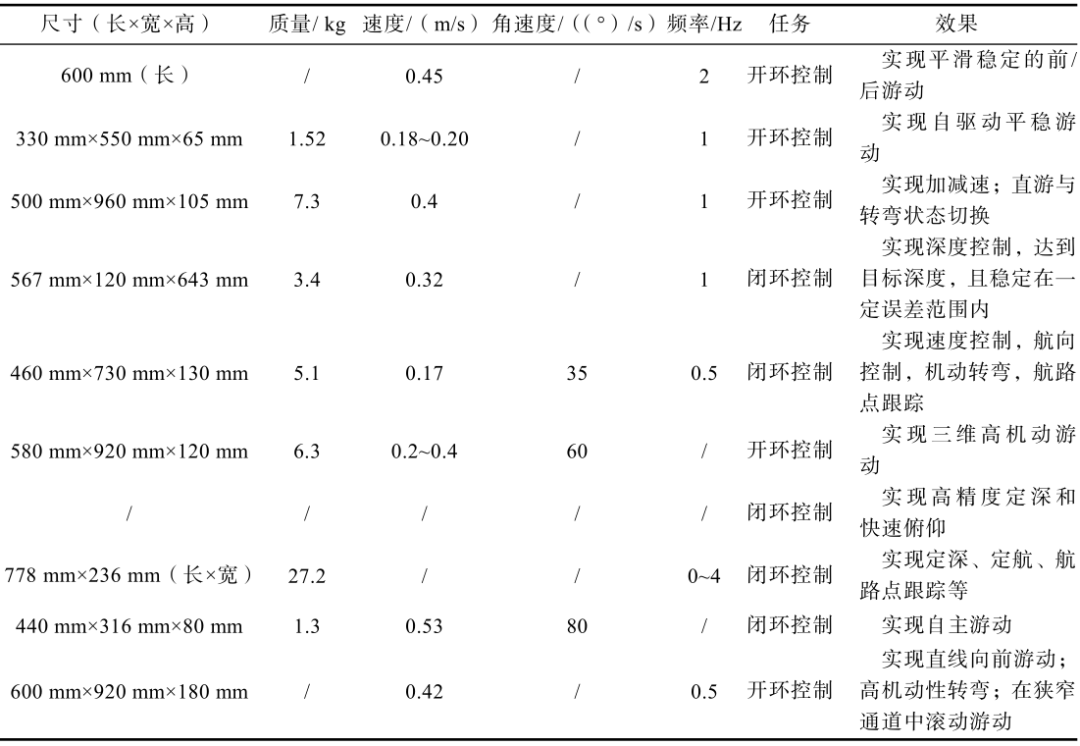
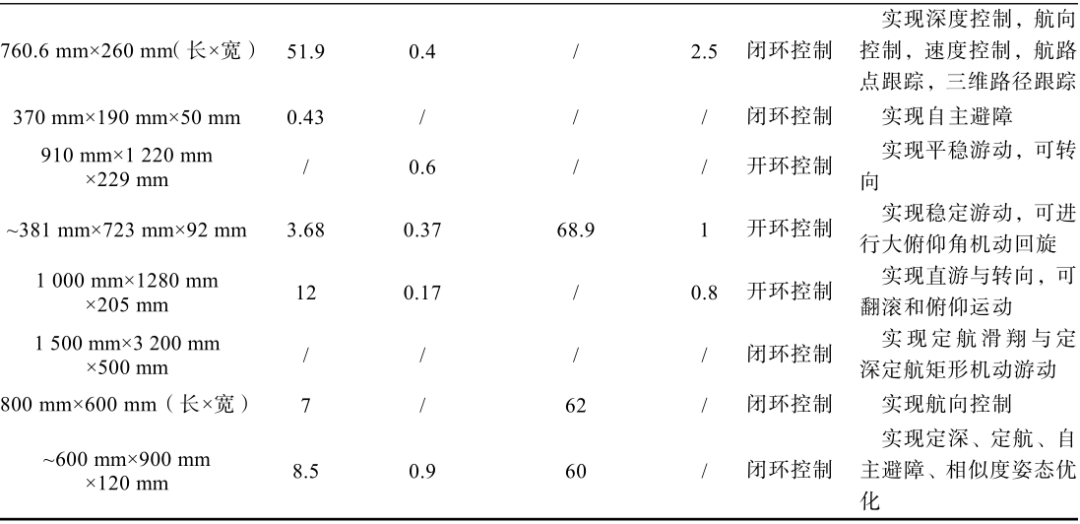
隨著水下撲翼機器人研究的深入,機器人在模仿真實生物時的重點由“形似”逐漸過渡到追求“神似”。通過提高仿真度,可以顯著提升仿生機器人的穩定性、機動性和游動效率。為了解決如何提高機器人運動姿態仿生相似度的問題,亟需建立基于仿生水下機器人的相似度評價體系,有效改善仿生機器人的運動特征和控制策略,進行機器人的運動相似度參數優化。 基于上述問題,MA等通過特征點軌跡提取和動態時間歸整(DTW)算法建立了運動姿態的相似度評價規則。通過引入偏置方程和時間非對稱系數,建立了表征蝠鲼胸鰭運動時間和空間非對稱性的相位振蕩器模型,構造了基于相位振蕩器的CPG拓撲網絡。在此基礎上,建立了運動姿態相似度的適應函數,并提出了CPG網絡參數的遺傳粒子群優化算法,通過水池實驗驗證了基于相似度優化運動參數優化的控制的有效性。實驗結果表明,優化后的仿蝠鲼機器人前游運動姿態與蝠鲼的相似度提高到88.53%;隨后,該團隊研究了仿蝠鲼機器人胸鰭鰭條相位差變化的優化方法,以輸出信號的平滑性和快速性為優化目標,采用非支配排序遺傳算法(NSAG-II)對CPG參數進行優化,得到最優參數組合。仿真和實驗結果驗證了優化后的CPG控制器輸出信號在相位切換過程中能夠平穩、快速地轉換。水下仿生撲翼機器人近年來發展情況如表1所示。
表1 水下仿生撲翼機器人近15年發展情況概述
?
綜上所述,基于CPG模型的方法被越來越多地使用到水下仿生撲翼機器人的胸鰭驅動上,該模型能夠在簡單的激勵輸入下模擬復雜的節律信號,具有很強的環境適應性,將傳感器信息耦合進CPG模型是水下仿生撲翼機器人撲翼驅動控制研究的新方向。在此基礎上,研究人員針對水下撲翼機器人的深度與航向控制問題,基于傳感器反饋采取合適的控制策略或無模型控制方法,通過改變水下撲翼機器人的俯仰與轉彎狀態實現深度與航向調節,從而實現深度與航向的控制。進一步地,水下撲翼機器人的路徑跟蹤與自主游動還需考慮機器人動力學模型的非線性與環境的不確定性,因此目前的研究成果多集中于單平面內的路徑跟蹤,而三維空間內的跟蹤問題仍處于初始階段。另一方面,仿生相似度評價方法的研究主要集中在仿生陸地生物和仿生機器人,對于運動機構具有明顯的主被動變形的水下撲翼機器人,完整的相似度評價體系還有待建立,且基于仿生相似度的運動姿態優化也存在較大的研究空間。 未來,水下仿生撲翼機器人的多載荷應用、任務規劃與執行將是其成為海洋重要裝備的關鍵,其所涉及控制問題也值得研究人員去探索。
三水下仿生撲翼機器人集群
與常規推進方式相比,魚類游動具有更高的效率、機動性、生物親和性和隱蔽性。近些年來,仿生集群逐漸成為水下機器人領域的一個研究熱點。 STEVENS等對蝠鲼種群進行了長達數十年的個體記錄與行為觀察,詳細闡明了蝠鲼個體與群體行為特征,根據蝠鲼的個體數量與運動類型,總結了蝠鲼個體與群體捕食策略,對于了解蝠鲼個體與群體行為特性提供了重要依據。 GAO等和MA等采用數值模擬的方法研究了串聯、并排與垂直隊形下距離與攻角對蝠鲼個體與整體滑翔水動力性能的影響。從阻力性能方面,雙蝠鲼的串聯與并排隊形可以顯著降低整體阻力;垂直滑翔中,隨著攻角的變化,個體獲得阻力交替減小的效果。在升力性能方面,無論何種排列方式,滑翔時的整體升力與單體升力基本相同。 國內外一些機構針對仿蝠鲼機器人的集群控制開展了相關研究。德國EvoLogics公司研發了BOSS-MantaRay,搭載多型傳感器,技術成熟度較高。采用水聲通信方式,實現了3臺以上BOSS-Manta水下組網與集群,如圖6所示,具備水文信息剖面測量、海底繪圖、協同監測和搜索等作業能力。 ?
2021年,浙江大學設計了由介電彈性體和伺服電機混合動力驅動的軟體蝠鲼機器魚,并提出了一種基于全局視覺定位的機器人集群系統,實現了對自然界生物平行、圍捕和環繞3種典型的群集行為的模仿。2022年,北京大學喻俊志團隊提出了一種基于視覺的仿蝠鲼機器人水下跟蹤方案,采用基于顏色的水下目標識別與定位方法,解決了機器人距離控制與方位控制耦合的問題,并通過水下實驗驗證了跟蹤方案的有效性和魯棒性。2023年,西北工業大學將仿蝠鲼機器人的跟隨問題轉變為導引問題。基于魚群行為啟發,制定了基于跟隨區域劃分的群游跟隨導引策略,利用水下動作捕捉系統實現了仿蝠鲼機器人的跟隨游動控制,如圖7所示。 ? 由于水下環境對感知和移動帶來了巨大挑戰,傳統的地面通信方法(如無線電)在水下表現不佳,而GPS等定位方法不可用。同時,水下移動面臨速度與加速限制等問題。目前,水下仿生撲翼機器人集群研究仍處于初始階段。
編輯:黃飛
?









 工商網監
工商網監
評論