 電子發(fā)燒友App
電子發(fā)燒友App



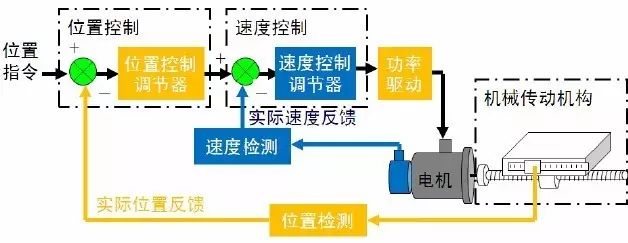
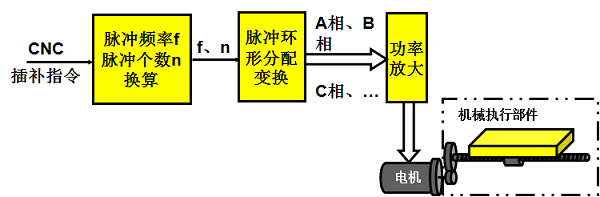
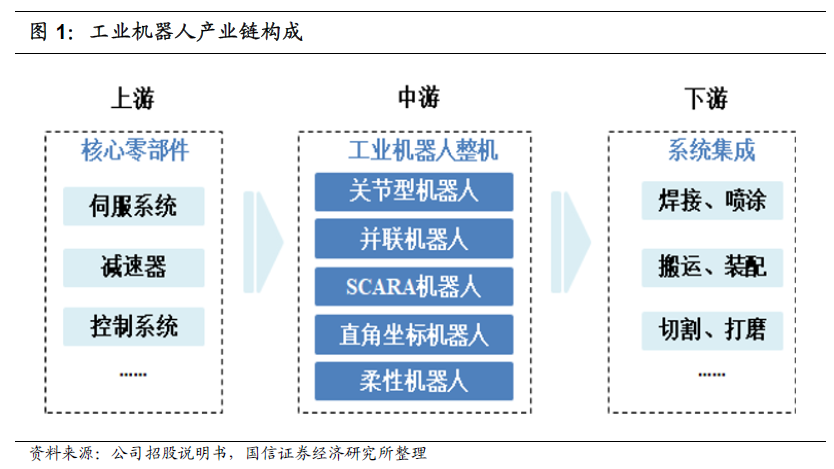
工業(yè)機器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業(yè)機器人電動伺服系統(tǒng)的一般結(jié)構(gòu)為三個閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。一般情況下,對于交流伺服驅(qū)動器,可通過對其內(nèi)部功能參數(shù)進行人工設(shè)定而實現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。
伺服系統(tǒng)(servomechanism)又稱隨動系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動控制系統(tǒng)。 ? 伺服系統(tǒng)是以變頻技術(shù)為基礎(chǔ)發(fā)展起來的產(chǎn)品,是一種以機械位置或角度作為控制對象的自動控制系統(tǒng)。伺服系統(tǒng)除了可以進行速度與轉(zhuǎn)矩控制外,還可以進行精確、快速、穩(wěn)定的位置控制。 廣義的伺服系統(tǒng)是精確地跟蹤或復(fù)現(xiàn)某個給定過程的控制系統(tǒng),也可稱作隨動系統(tǒng)。 狹義伺服系統(tǒng)又稱位置隨動系統(tǒng),其被控制量(輸出量)是負(fù)載機械空間位置的線位移或角位移,當(dāng)位置給定量(輸入量)作任意變化時,系統(tǒng)的主要任務(wù)是使輸出量快速而準(zhǔn)確地復(fù)現(xiàn)給定量的變化。 ?
? 伺服系統(tǒng)的結(jié)構(gòu)組成
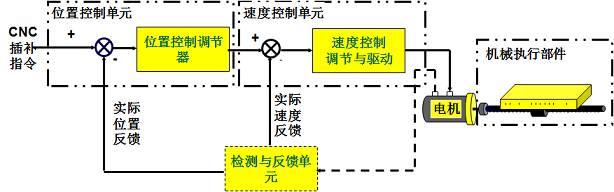
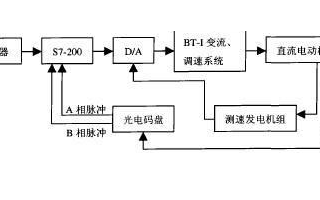
機電一體化的伺服控制系統(tǒng)的結(jié)構(gòu)、類型繁多,但從自動控制理論的角度來分析,伺服控制系統(tǒng)一般包括控制器、被控對象、執(zhí)行環(huán)節(jié)、檢測環(huán)節(jié)、比較環(huán)節(jié)等五部分。 ?
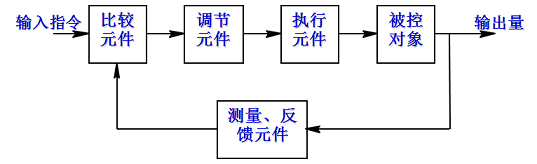
伺服系統(tǒng)組成原理框圖
1、比較環(huán)節(jié)? 比較環(huán)節(jié)是將輸入的指令信號與系統(tǒng)的反饋信號進行比較,以獲得輸出與輸入間的偏差信號的環(huán)節(jié),通常由專門的電路或計算機來實現(xiàn)。 ?
?2、控制器? 控制器通常是計算機或PID(比例、積分和微分)控制電路,其主要任務(wù)是對比較元件輸出的偏差信號進行變換處理,以控制執(zhí)行元件按要求動作。 ?
3、執(zhí)行環(huán)節(jié)? 執(zhí)行環(huán)節(jié)的作用是按控制信號的要求,將輸入的各種形式的能量轉(zhuǎn)化成機械能,驅(qū)動被控對象工作。機電一體化系統(tǒng)中的執(zhí)行元件一般指各種電機或液壓、氣動伺服機構(gòu)等。?? ? ? ? ?? ? ? ? ? ? ?
4、被控對象? 被控對象指被控制的物件,例如一個機械手 臂,或是一個機械工作平臺。
? 5、檢測環(huán)節(jié)? 檢測環(huán)節(jié)是指能夠?qū)敵鲞M行測量并轉(zhuǎn)換成比較環(huán)節(jié)所需要的量綱的裝置,一般包括傳感器和轉(zhuǎn)換電路。
伺服系統(tǒng)的特點和功用
伺服系統(tǒng)與一般機床的進給系統(tǒng)有本質(zhì)上差別,它能根據(jù)指令信號精確地控制執(zhí)行部件的運動速度與位置。伺服系統(tǒng)是數(shù)控裝置和機床的聯(lián)系環(huán)節(jié),是數(shù)控系統(tǒng)的重要組成,具有以下特點: ?
必須具備高精度的傳感器,能準(zhǔn)確地給出輸出量的電信號。 ?
功率放大器以及控制系統(tǒng)都必須是可逆的。 ?
足夠大的調(diào)速范圍及足夠強的低速帶載性能。 ?
快速的響應(yīng)能力和較強的抗干擾能力。
伺服系統(tǒng)的類型 ???
按控制原理分:有開環(huán)、閉環(huán)和半閉環(huán)三種形式 ?
按被控制量性質(zhì)分:?有位移、速度、力和力矩等伺服系統(tǒng)形式 ?
按驅(qū)動方式分:?有電氣、液壓和氣壓等伺服驅(qū)動形式 ?
按執(zhí)行元件分:?有步進電機伺服、直流電機伺服和交流電機伺服形式
伺服系統(tǒng)的執(zhí)行元件 1、執(zhí)行元件的種類及其特點? ? ?
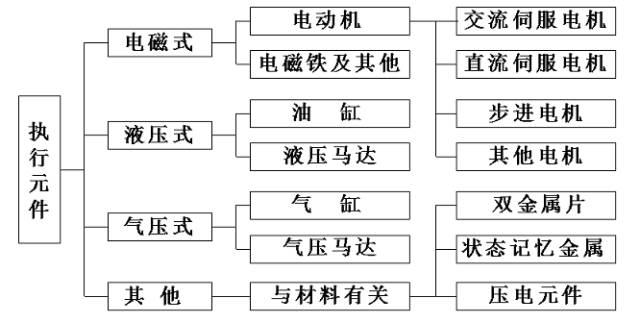
? (1)電氣式執(zhí)行元件 ?電氣執(zhí)行元件包括直流(DC)伺服電機、交流(AC)伺服電機、步進電機以及電磁鐵等,是最常用的執(zhí)行元件。對伺服電機除了要求運轉(zhuǎn)平穩(wěn)以外,一般還要求動態(tài)性能好,適合于頻繁使用,便于維修等。 ? ?
(2)液壓式執(zhí)行元件 ?液壓式執(zhí)行元件主要包括往復(fù)運動油缸、回轉(zhuǎn)油缸、液壓馬達等,其中油缸最為常見。在同等輸出功率的情況下,液壓元件具有重量輕、快速性好等特點。
? ?? (3)氣壓式執(zhí)行元件 ?氣壓式執(zhí)行元件除了用壓縮空氣作工作介質(zhì)外,與液壓式執(zhí)行元件沒有區(qū)別。氣壓驅(qū)動雖可得到較大的驅(qū)動力、行程和速度,但由于空氣粘性差,具有可壓縮性,故不能在定位精度要求較高的場合使用。
? 三種類型的區(qū)別
?
| 種類 | 特點 | 優(yōu)點 | 缺點 |
| ? 電 氣 式 | ???可用商業(yè)電源;信號與動力傳送方向相同;有交流直流之分;注意使用電壓和功率。 | 操作簡便;編程容易;能實現(xiàn)定位伺服控制;響應(yīng)快、易與計算機(CPU)連接;體積小、動力大、無污染。?? | 瞬時輸出功率大;過載差;一旦卡死,會引起燒毀事故;受外界噪音影響大。?? |
| ? 氣 壓 式 | ? ?氣體壓力源壓力5~7×Mpa;要求操作人員技術(shù)熟練。 | 氣源方便、成本低;無泄露而污染環(huán)境;速度快、操作簡便。 | 功率小、體積大、難于小型化;動作不平穩(wěn)、遠距離傳輸困難;噪音大;難于伺服。?? |
| ? 液 壓 式 | ???液體壓力源壓力20~80×Mpa;要求操作人員技術(shù)熟練。 | 輸出功率大,速度快、動作平穩(wěn),可實現(xiàn)定位伺服控制;易與計算機(CPU)連接。 | 設(shè)備難于小型化;液壓源和液壓油要求嚴(yán)格;易產(chǎn)生泄露而污染環(huán)境。 |
?
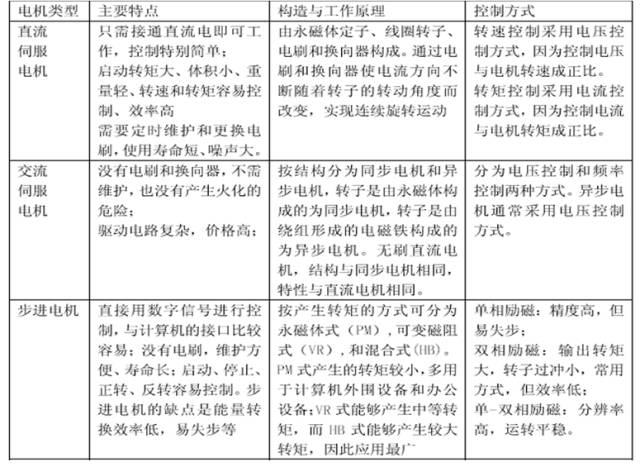
2、常用的控制用電機
控制用電機是電氣伺服控制系統(tǒng)的動力部件。它是將電能轉(zhuǎn)換為機械能的一種能量轉(zhuǎn)換裝置。機電一體化產(chǎn)品中常用的控制用電機是指能提供正確運動或較復(fù)雜動作的伺服電機。 ? 控制用電機有回轉(zhuǎn)和直線驅(qū)動電機,通過電壓、電流、頻率(包括指令脈沖)等控制,實現(xiàn)定速、變速驅(qū)動或反復(fù)啟動、停止的增量驅(qū)動以及復(fù)雜的驅(qū)動,而驅(qū)動精度隨驅(qū)動對象的不同而不同。 ? (1)伺服驅(qū)動電機一般是指:步進電機(Stepping Motor)、直流伺服電機(DC Servo Motor)、交流伺服電機(AC Servo Motor) ?
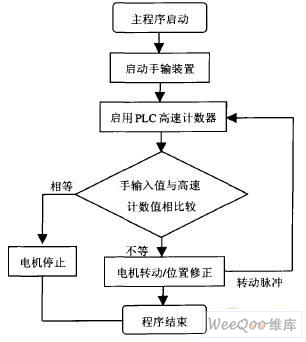
(2)常用伺服控制電動機的控制方式主要有:開環(huán)控制、半閉環(huán)控制、閉環(huán)控制三種。 ? 閉環(huán)系統(tǒng)的驅(qū)動系統(tǒng)具有位置(或速度)反饋環(huán)節(jié);開環(huán)系統(tǒng)沒有位置與速度反饋環(huán)節(jié)。 ? a、開環(huán)數(shù)控系統(tǒng) 沒有位置測量裝置,信號流是單向的(數(shù)控裝置→進給系統(tǒng)),故系統(tǒng)穩(wěn)定性好。
? 無位置反饋,精度相對閉環(huán)系統(tǒng)來講不高,其精度主要取決于伺服驅(qū)動系統(tǒng)和機械傳動機構(gòu)的性能和精度。一般以功率步進電機作為伺服驅(qū)動元件。 ? 這類系統(tǒng)具有結(jié)構(gòu)簡單、工作穩(wěn)定、調(diào)試方便、維修簡單、價格低廉等優(yōu)點,在精度和速度要求不高、驅(qū)動力矩不大的場合得到廣泛應(yīng)用。一般用于經(jīng)濟型數(shù)控機床。 ? b、半閉環(huán)數(shù)控系統(tǒng) 半閉環(huán)數(shù)控系統(tǒng)的位置采樣點如圖所示,是從驅(qū)動裝置(常用伺服電機)或絲杠引出,采樣旋轉(zhuǎn)角度進行檢測,不是直接檢測運動部件的實際位置。
? 半閉環(huán)環(huán)路內(nèi)不包括或只包括少量機械傳動環(huán)節(jié),因此可獲得穩(wěn)定的控制性能,其系統(tǒng)的穩(wěn)定性雖不如開環(huán)系統(tǒng),但比閉環(huán)要好。由于絲杠的螺距誤差和齒輪間隙引起的運動誤差難以消除。因此,其精度較閉環(huán)差,較開環(huán)好。但可對這類誤差進行補償,因而仍可獲得滿意的精度。 ? 半閉環(huán)數(shù)控系統(tǒng)結(jié)構(gòu)簡單、調(diào)試方便、精度也較高,因而在現(xiàn)代CNC機床中得到了廣泛應(yīng)用。 ? c、全閉環(huán)數(shù)控系統(tǒng) 全閉環(huán)數(shù)控系統(tǒng)的位置采樣點如圖的虛線所示,直接對運動部件的實際位置進行檢測。
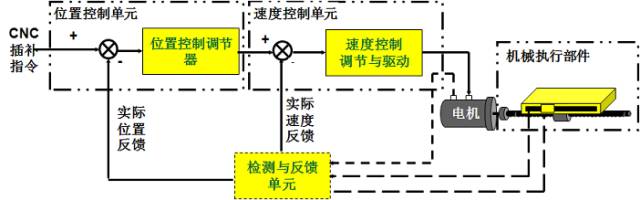
? 從理論上講,可以消除整個驅(qū)動和傳動環(huán)節(jié)的誤差、間隙和失動量。具有很高的位置控制精度。由于位置環(huán)內(nèi)的許多機械傳動環(huán)節(jié)的摩擦特性、剛性和間隙都是非線性的,故很容易造成系統(tǒng)的不穩(wěn)定,使閉環(huán)系統(tǒng)的設(shè)計、安裝和調(diào)試都相當(dāng)困難。 ? 該系統(tǒng)主要用于精度要求很高的鏜銑床、超精車床、超精磨床以及較大型的數(shù)控機床等。
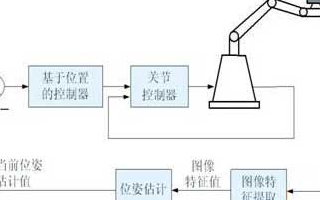
機器人的伺服系統(tǒng)
通常情況下,我們所說的機器人伺服系統(tǒng)是指應(yīng)用于多軸運動控制的精密伺服系統(tǒng)。一個多軸運動控制系統(tǒng)是由高階運動控制器與低階伺服驅(qū)動器所組成,運動控制器負(fù)責(zé)運動控制命令譯碼、各個位置控制軸彼此間的相對運動、加減速輪廓控制等等,其主要作用在于降低整體系統(tǒng)運動控制的路徑誤差;伺服驅(qū)動器負(fù)責(zé)伺服電機的位置控制,其主要作用在于降低伺服軸的追隨誤差。
機器人的伺服系統(tǒng)由伺服電機、伺服驅(qū)動器、指令機構(gòu)三大部分構(gòu)成,伺服電機是執(zhí)行機構(gòu),就是靠它來實現(xiàn)運動的,伺服驅(qū)動器是伺服電機的功率電源,指令機構(gòu)是發(fā)脈沖或者給速度用于配合伺服驅(qū)動器正常工作的。 ? 機器人對伺服電機的要求比其它兩個部分都高。首先要求伺服電機具有快速響應(yīng)性。電機從獲得指令信號到完成指令所要求的工作狀態(tài)的時間應(yīng)短。響應(yīng)指令信號的時間愈短,電伺服系統(tǒng)的靈敏性愈高,快速響應(yīng)性能愈好,一般是以伺服電機的機電時間常數(shù)的大小來說明伺服電機快速響應(yīng)的性能。其次,伺服電機的起動轉(zhuǎn)矩慣量比要大。在驅(qū)動負(fù)載的情況下,要求機器人的伺服電機的起動轉(zhuǎn)矩大,轉(zhuǎn)動慣量小。最后,伺服電機要具有控制特性的連續(xù)性和直線性,隨著控制信號的變化,電機的轉(zhuǎn)速能連續(xù)變化,有時還需轉(zhuǎn)速與控制信號成正比或近似成正比。 ? 當(dāng)然,為了配合機器人的體形,伺服電機必須體積小、質(zhì)量小、軸向尺寸短。還要經(jīng)受得起苛刻的運行條件,可進行十分頻繁的正反向和加減速運行,并能在短時間內(nèi)承受數(shù)倍過載。 伺服驅(qū)動器是可利用各種電機產(chǎn)生的力矩和力,直接或間接地驅(qū)動機器人本體以獲得機器人的各種運動的執(zhí)行機構(gòu),具有轉(zhuǎn)矩轉(zhuǎn)動慣量比高、無電刷及換向火花等優(yōu)點,在機器人中應(yīng)用比較廣泛。 ?
國外知名伺服電機/系統(tǒng)制造商
倫茨(德國) ? 倫茨(lenze)是世界上著名的機電傳動產(chǎn)品制造商,主要產(chǎn)品有直流調(diào)速裝置、交流變頻器、交流伺服、各類電動機、小型傳動轉(zhuǎn)置、減速箱、變速器、制動器、離合器等。該公司現(xiàn)役的產(chǎn)品MCM同步伺服電機主打機器人市場,結(jié)構(gòu)緊湊、負(fù)載與電機慣量比佳、外殼平滑、簡單易用,適合包裝、搬運等應(yīng)用場景。 ?
博世力士樂(德國)
博世力士樂(BoschRexroth)作為德國博世集團的全資子公司.是全球工業(yè)技術(shù)市場的領(lǐng)先供應(yīng)商,在傳動和控制領(lǐng)域聲譽卓著。該公司旗下產(chǎn)品種類繁多,主要集中在高質(zhì)量電控、液壓、氣動、機電一體化元件和系統(tǒng)等領(lǐng)域。 ? ? ?
路斯特(德國)
? 路斯特(lust)隸屬于柯爾柏集團,專注于向機器人/機床制造業(yè)提供通用型、可編程型及多軸運動控制型伺服驅(qū)動產(chǎn)品及相關(guān)解決方案的生產(chǎn)和貿(mào)易性企業(yè)。標(biāo)準(zhǔn)產(chǎn)品譜寬,涵蓋通用型、可編程型、多軸運動控制型,它們被廣泛的應(yīng)用于各類產(chǎn)業(yè)機械和機床。 ?
? ? 倍福(德國)
? 倍福(Beckhoff)基于PC的自動化新技術(shù)作為發(fā)展理念,所生產(chǎn)的工業(yè)PC、現(xiàn)場總線模塊、驅(qū)動產(chǎn)品和TwinCAT自動化軟件構(gòu)成了一套完整的、相互兼容的控制系統(tǒng),可為各個工控領(lǐng)域提供開放式自動化系統(tǒng)和完整的解決方案。 ? ?
? 西門子(德國)
西門子是世界上最大的電氣和電子公司之一,歷經(jīng)150年來常盛不衰,公司的業(yè)務(wù)主要集中于6大領(lǐng)域:信息和通訊、自動化和控制、電力、交通、醫(yī)療系統(tǒng)和照明。西門子的伺服電機種類豐富、結(jié)構(gòu)緊湊,可實現(xiàn)卓越的動態(tài)特性和運行效率,性能等級全,安裝規(guī)格多樣。 ? ? ? 歐系伺服特點是過載能力高,動態(tài)響應(yīng)好,驅(qū)動器開放性強,且具有總線接口,包括現(xiàn)場總線、工業(yè)以太網(wǎng)甚至無線網(wǎng)絡(luò)技術(shù)。但價格昂貴,體積重量大。(目前的高速伺服總線雖大多為開放標(biāo)準(zhǔn),但技術(shù)都被國際化大公司所掌控。尤其是基于工業(yè)以太網(wǎng)技術(shù),如EtherCAT、 Profinet、 EtherNet/IP、SERCOS III等,在提升工業(yè)機器人專用交流伺服系統(tǒng)的高性能方面起到了舉足輕重的作用。德國公司Beckhoff推出的EtherCAT近年來發(fā)展勢頭迅猛,成為大多數(shù)高性能驅(qū)動系統(tǒng)首選的網(wǎng)絡(luò)標(biāo)準(zhǔn),安川、倫茨等國外伺服廠商已將EtherCAT 總線,作為下一代產(chǎn)品的總線標(biāo)準(zhǔn)。) ? ?
松下(日本)
? 松下是一家大型跨國企業(yè),經(jīng)營產(chǎn)品涉及家電、數(shù)碼視聽電子、辦公產(chǎn)品、航空等諸多領(lǐng)域。松下旗下的松下電機主營電氣機電類服務(wù),該公司推出的小型交流伺服電動機和驅(qū)動器頗受市場歡迎,其中大慣量系列適用于數(shù)控機床,中慣量系列適用于機器人(最高轉(zhuǎn)速為3000r/min,力矩為0.016~0.16N.m)。?
? 安川(日本)
安川電機是世界一流的傳動產(chǎn)品制造商,也是日本第一個做伺服電機的公司,其產(chǎn)品以穩(wěn)定快速著稱,性價比高,是全球銷售量最大,使用行業(yè)最多的伺服品牌。從一般工業(yè)用機械到半導(dǎo)體、電子零部件制造設(shè)備,安川都能提供適合于各種用途的最匹配的伺服、控制器產(chǎn)品。 ? ? ?
三菱(日本)
? 三菱不是一家獨立的公司,而是由眾多的獨立公司組成的團體,該公司涉足采礦、造船、銀行、保險、倉儲、貿(mào)易、紙、鋼鐵、玻璃、電氣設(shè)備、飛機、石油和房地產(chǎn)等諸多領(lǐng)域,是日本的工業(yè)巨頭。三菱電機一直致力于提高產(chǎn)品性能,F(xiàn)A產(chǎn)品陣容涵蓋在亞洲占主導(dǎo)地位的可編程控制器(PLC)、人機界面(HMI)、交流伺服系統(tǒng)、變頻器、工業(yè)機器人以 及低壓配電產(chǎn)品。
? ? 三洋(日本)
三洋是是日本松下旗下的電器公司,瞄準(zhǔn)中端市場。2012年4月1日起,該品牌被停止?fàn)I運。三洋的Denki交流伺服驅(qū)動系統(tǒng)是最早進入國內(nèi)的伺服系統(tǒng)之一,以其卓越的性能高速精確靈活使用壽命長性價比高等特點聞名于世,可以實現(xiàn)不同控制方式的切換、全閉環(huán)控制、具有輸出檢測功能、自動濾波功能、實時自整定功能,廣泛應(yīng)用于冶金高爐印刷機械、包裝機械、紡織機械、塑膠機械、醫(yī)療設(shè)備、自動化生產(chǎn)線等領(lǐng)域。 ?
? 三洋AC伺服系列
日系伺服電機價格相對低,體積小,重量輕。但缺點也很明顯,就是動態(tài)響應(yīng)能力相對弱,開放性較差。
? ELMO(以色列)
? Elmo Motion Control是一家專業(yè)開發(fā)緊湊型、高功率伺服電機的企業(yè),25年來一直致力于為各種惡劣工業(yè)環(huán)境設(shè)計了伺服驅(qū)動器,同時提供先進的網(wǎng)絡(luò)運動控制器和完整的運動控制解決方案。該公司號稱自己打造的是全球最好的伺服電機。
? ? SERVOTRONIX(美的)
servotronix(高創(chuàng))專注于運動控制領(lǐng)域業(yè)務(wù),也是一家專業(yè)開發(fā)高性能伺服驅(qū)動器系列和運動控制解決方案的企業(yè)。該公司已被美的收購,未來將成為庫卡機器人伺服電機的主要供應(yīng)商。
? AMC(美國)
? AMC(ADVANCED Motion Controls)是一家提供可靠和高性能運動控制系統(tǒng)的公司,創(chuàng)立于1987年,幾十年來一直保持小體量,只有300多名員工,其中40%是工程師。該公司的目標(biāo)是成為最好的伺服公司,因此只生產(chǎn)伺服驅(qū)動領(lǐng)域的產(chǎn)品。依靠精湛的制造水平和先進的研發(fā)能力,近7年來,該公司客戶存留率高達91%。 ? ?
COPLEY(美國)
? 和AMC一樣,Copley Controls也是一家專注于伺服驅(qū)動的公司,主要為廣泛的工業(yè)應(yīng)用提供高性能運動控制解決方案,擁有超過25年的OEM合作經(jīng)驗。該公司產(chǎn)品的應(yīng)用領(lǐng)域主要有半導(dǎo)體、生命科學(xué)、自動化裝備、機器人、測試/測量以及COTS軍工等。 ? ? 以上這幾家公司是伺服控制技術(shù)的領(lǐng)軍者,它們的產(chǎn)品雖然在市場上份額不大,但代表伺服控制的技術(shù)發(fā)展導(dǎo)向。 ?
國內(nèi)知名伺服電機/系統(tǒng)制造商
伴隨這幾年數(shù)控化的普及,國內(nèi)伺服產(chǎn)品的銷量保持了快速增長,伺服系統(tǒng)的自主研發(fā)、制造生產(chǎn)及應(yīng)用已基本成熟,形成了一定的產(chǎn)品系列和自主配套能力,但產(chǎn)品在高性能、高可靠性方面,與國外名牌企業(yè)仍存在明顯差距,如國產(chǎn)品牌產(chǎn)品功率范圍多在3KW以內(nèi),中小功率居多,技術(shù)路線上與日系產(chǎn)品接近。 ? 隨著工業(yè)機器人市場掀起熱潮,我國伺服系統(tǒng)與國外名牌企業(yè)的明顯差距已成為制約我國工業(yè)機器人產(chǎn)業(yè)的“瓶頸”。從技術(shù)上看,國產(chǎn)伺服電機主要有以下幾個缺陷:
一是外形普遍較長,外觀粗糙,很難應(yīng)用在一些高檔機器人上面。尤其是在輕載6kg左右的桌面型機器人上,由于機器人手臂的安裝空間非常狹小,對伺服電機的長度有嚴(yán)格要求。 ?
二是信號接插件的可靠性需要改進,而且需要朝小型化、高密度化以及與伺服電機本體的集成設(shè)計的方向設(shè)計,方便安裝、調(diào)試、更換。
? 三是另一個核心技術(shù)就是高精度的編碼器,尤其機器人上用的多圈絕對值編碼器,嚴(yán)重依賴進口,是制約我國高檔機器人發(fā)展的很大瓶頸。編碼器的小型化也是伺服電機小型化繞不過去的核心技術(shù)。
? 四是缺失基礎(chǔ)性研究,包括絕對值編碼器技術(shù)、高端電機的產(chǎn)業(yè)化制造技術(shù)、生產(chǎn)工藝的突破、性能指標(biāo)的實用性驗證和考核標(biāo)準(zhǔn)的制定。
? 五是伺服系統(tǒng)各部分產(chǎn)業(yè)協(xié)同聯(lián)合不夠,導(dǎo)致伺服電機和驅(qū)動系統(tǒng)整體性能難以做好。
值得一提的是,除了以上五點工藝硬傷,許多國內(nèi)伺服電機廠商還在繼續(xù)采用購買過時技術(shù)、硬件打造“國產(chǎn)”電機的做法,這樣生產(chǎn)出來的電機質(zhì)量、穩(wěn)定性參差不齊,不僅擾亂市場,還打擊了企業(yè)內(nèi)部自主研發(fā)的熱情,不利于長期的可持續(xù)發(fā)展。 ? 目前我國國內(nèi)較大規(guī)模的伺服品牌有20余家,這些制造商的部分產(chǎn)品質(zhì)量、性能較為突出,可圈可點,顯示出了一定的獨立性和創(chuàng)新性。? ? 臺達(臺灣) ? 臺達是知名華人自動化品牌,在全球自動化領(lǐng)域占據(jù)獨特地位。90年代初期,臺達采取自主研發(fā)的方式,開始進軍工業(yè)自動化領(lǐng)域。基于其在電力電子領(lǐng)域的積累,臺達從變頻器產(chǎn)品起步,到后來PLC、伺服、HMI、CNC數(shù)控系統(tǒng),再到基于PC-Based的PAC控制器、傳感器、機器視覺、工業(yè)機器人等全系列自動化產(chǎn)品,最后鎖定驅(qū)動、運動、控制三大領(lǐng)域。 ? ?
臺達ECMA系列標(biāo)準(zhǔn)型交流伺服電機 ? 士林(臺灣)
士林電機(shihlin)創(chuàng)立于1955年,主要開發(fā)重電、電裝、機器、自動化領(lǐng)域的相關(guān)產(chǎn)品。該公司和日本三菱合作密切,在廈門建有合資公司,據(jù)傳產(chǎn)品的用戶體驗與三菱電機不相上下。以士林SDH交流伺服系列為例,這系列電機采用臺灣最好的編碼器,響應(yīng)速度全臺第一。 ? ? 臺系品牌使用簡單,性能接近日系,但價格比日系品牌低廉,性價比高,在中低端市場發(fā)展較快。
? 匯川
深圳匯川主要從事自動化、新能源相關(guān)領(lǐng)域產(chǎn)品研發(fā),是本土企業(yè)中伺服電機市場占有率最高的品牌。匯川在智能裝備、工業(yè)機器人領(lǐng)域推出了變頻器、伺服系統(tǒng)、控制系統(tǒng)、工業(yè)視覺系統(tǒng)、傳感器等核心部件及電氣解決方案等一系列工業(yè)自動化產(chǎn)品,目前已成為國內(nèi)最大的中低壓變頻器與伺服系統(tǒng)供應(yīng)商。匯川旗下幾款伺服電機都支持Ethercat以太網(wǎng)通訊協(xié)議。 ? ? ?
固高
固高科技是國內(nèi)技術(shù)領(lǐng)先的自動控制產(chǎn)品供應(yīng)商,該公司自主研發(fā)的基于PC的開放式運動控制器、嵌入式運動控制器、網(wǎng)絡(luò)式運動控制器、計算機可編程自動化控制器產(chǎn)品與系統(tǒng),綜合性能已達到了國際一流水平,填補了國內(nèi)同行業(yè)的多項空白。固高主要為機器人運動控制提供系統(tǒng)。 ? ?
? 華中數(shù)控
華中數(shù)控背靠中科大,研發(fā)能力出色,是國內(nèi)最大的中高檔數(shù)控系列生產(chǎn)企業(yè),旗下的車床伺服電機已達到國際中端水平。該公司的GK6、GK7全系列永磁同步交流伺服電機和GM7系列交流伺服主軸已實現(xiàn)批量生產(chǎn),是目前全國唯一擁有成套核心技術(shù)自主知識產(chǎn)權(quán)和自助配套能力的企業(yè)。 ? ?
廣州數(shù)控
廣州數(shù)控面向數(shù)控機床行業(yè)、自動化控制領(lǐng)域、注塑制品行業(yè),是全國最大的機床數(shù)控系統(tǒng)研發(fā)廠商,突出優(yōu)勢是產(chǎn)業(yè)鏈齊全、規(guī)模龐大。該公司的伺服系統(tǒng)主要用于機床、包裝機械等方面。 ? ?
英威騰
? 2011年,英威騰收購御能動力,并把該品牌打造成了紡織機械伺服系統(tǒng)的細分龍頭。英威騰主要為紡織機械企業(yè)提供整體解決方案,并在業(yè)內(nèi)提供系列型號最為全面的防止伺服系統(tǒng),目前該公司的伺服產(chǎn)品在紡織機械、包裝機械、數(shù)控車床、點膠機、LED分光編帶機貼片機等機器上有廣泛應(yīng)用,性價比較高。 ? ? 埃斯頓
? 南京埃斯頓有十幾年生產(chǎn)和銷售交流全數(shù)字化通用交流伺服驅(qū)動器和電機的歷史,產(chǎn)品廣泛應(yīng)用于各類數(shù)控機床和自動化設(shè)備。公司于2012年成功完成了863計劃重大專項“工業(yè)機器人交流伺服系統(tǒng)驅(qū)動器和電機開發(fā)”,擁有了自主品牌的機器人專用交流伺服系統(tǒng)。目前,公司所有機器人使用的交流伺服系統(tǒng)均為自產(chǎn),實現(xiàn)了國產(chǎn)核心零部件的突破。公司還成功開發(fā)了機器人專用“一拖六”交流伺服系統(tǒng),為研制更經(jīng)濟高效的國產(chǎn)機器人提供了基礎(chǔ)。
? ? 機器人的工作表現(xiàn)受伺服系統(tǒng)影響極大,因而精密伺服系統(tǒng)的關(guān)鍵性能指標(biāo)永遠都是先進性比較的首要因素。國外先進伺服系統(tǒng)已經(jīng)能夠很好地適應(yīng)絕大多數(shù)應(yīng)用的需求,其研發(fā)資源集中在個別高端應(yīng)用及整體性能提升方面,處于精雕細刻階段。在工業(yè)4.0的大背景下,國產(chǎn)伺服任重而道遠,還需努力追趕。
編輯:黃飛
?














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論