今年以來,由中科院沈陽自動化所自主研制的深海自主水下機器人“潛龍二號”和自主遙控混合式水下機器人“海斗”號先后成功完成試驗性應用,前者取得我國大洋熱液探測的重大突破,后者在我國首次萬米深淵科考航次中成功應用,最大下潛深度10767米。
2016-12-22 11:06:43 866
866 ITECH某用戶為國際知名ROV公司提供供電系統,采購IT7625線性交流源測試一款工作級水下機器人的變壓器、配電單元及控制器。
2020-08-07 17:47:351451 為了提高水下機器人的感知能力,基于仿生原理的觸須傳感器被研究人員開發并應用。側線是魚的一個感應器官,可以感知周圍水流的變化,從而幫助魚在黑暗條件下感知周圍的環境。
2022-04-21 15:01:4811021 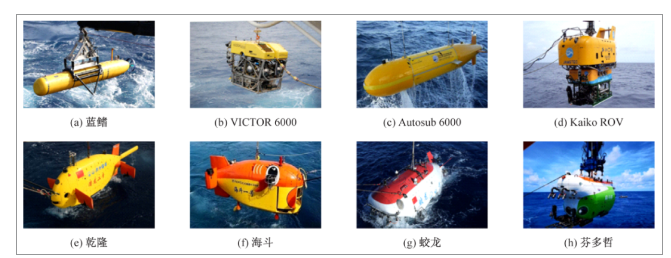
函數非常多,主要涉及到機器人建模、正運動學、逆運動學、動力學、逆動力學、雅克比、軌跡規劃等。對于機器人建模,用到最重要的兩個函數就是Link和Seriallink函數(1)Link 類Link包含了與機器人連桿相關的所有信息,例如運動學參數、剛體慣性參數、電機和傳送參數等。使用方法:A :關
2021-09-15 09:04:23
本帖最后由 eehome 于 2013-1-5 10:05 編輯
水下機器人水面控制臺通常基于計算機平臺,體積較為龐大,不便于移動。但在某些情況下,如水下機器人水面回收或者水面測試載體各種航行
2011-03-08 14:21:34
工程訓練綜合能力大賽——水下機器人管道巡檢組賽后總結前言一、水下機器人管道巡檢組內容簡述二、功能實現1.巡檢管道2.識別吸附物總結前言前段時間參加了工程訓練綜合能力大賽——水下機器人管道巡檢組,非常
2022-01-11 06:51:45
Adams/Controls機電液控系統聯合仿真機器人、航空航天
Adams/Flex柔性體動力學分析輕量化結構設計
Adams/View參數化建模與可視化前處理概念設計階段驗證 三、關鍵技術
2025-04-17 17:24:08
本書系統地介紹了工業機器人的基本組成、機械機構、運動學及動力學、控制系統、編程與調試、典型應用、管理與維護等內容。全書共7章,第1章介紹了工業機器人的發展與應用、機器人的組成與分類;第2章介紹了工業
2022-10-16 21:21:57
近來,在與客戶工程師的溝通中了解了一些系留無人機和水下機器人等方面的系統應用,兩種設備雖然完全屬于不同的行業領域,但是供電的構架卻有很多相似之處,這里粗略整理一下,分享給大家。系留無人機電源構架系留
2019-08-16 11:15:31
,對工業機器人的運動學、動力學、基本控制系統等傳統內容的介紹比較簡潔,對機器視覺、機器聽覺和移動機器人的自主定位等新技術介紹較多,并以可重現的若干實例對相應技術和方法進行了驗證,相關程序代碼附在書中,重點
2016-06-01 13:12:46
機器人學的核心問題是做好和物理世界的交互。現在主流的機器人學分支里,處理與物理世界的交互的學科分為三類:傳感器和處理算法;多剛體系統動力學控制;機器人自主移動。 智能機器人會成為...
2021-07-28 08:03:48
項目名稱:水下智能機器人試用計劃:1.對BeagleBone Black硬件資源進行測評2.通過燒寫ubuntu系統 結合硬件資源進行軟硬件測試3.基于ubuntu,stm32,電力貓三個硬件構建水下機器人4.項目開陣。按時間完成計劃5項目調試 資源分享。預計成果:發表帖子分享項目開展過程,結果,經驗。
2017-07-04 16:55:05
摘要:本文主要介紹如何根據國外開源項目(OpenROV)開始自己DIY一個水下機器人。關鍵詞:水下機器人 DIY背景水下無人機在近兩年大熱,經常出現在各種眾籌平臺,在大學生的挑戰杯等比賽上也能見到其
2017-07-25 20:23:28
項目名稱:漁業衛士-基于圖像識別的多自由度水下機器人試用計劃:1、申請理由希望早日接觸、應用國產的鴻蒙系統。2、項目名稱漁業衛士-基于圖像識別的多自由度水下機器人3、計劃(1)約三個月時間,應用該款
2020-09-25 10:11:50
項目名稱:水下機器人探測項目試用計劃:1、我是廣東海洋大學嵌入式工作組的成員 丘子楓,現在是大三的學生。從大一開始就從單片機開始慢慢接觸嵌入式的東西。參與設計的了我校首個水下機器人,并且從大二的時候
2017-06-01 09:45:11
Ⅲ 建模為了使用基于模型的控制策略以及現代狀態估計技術,需要一個描述機器人剛體動力學的系統模型。A. 坐標和符號規定旋轉規定:a˙\dot aa˙ 表示對時間的導數, ?a^{\hat a}a^表示
2021-09-15 08:12:14
《先進機器人控制》從控制的角度系統地介紹了機器人學的基礎知識和當前的發展狀況。全書共分為12章,由基礎篇、控制結構篇和先進控制篇構成。基礎篇著重介紹串聯關節機器人的運動學、運動規劃和動力學。其中
2017-09-19 15:30:57
系統的管理、通訊、運動學和動力學計算,并向下級微機發送指令信息;作為下級從機,各關節分別對應一個CPU,進行插補運算和伺服控制處理,實現給定的運動,并向主機反饋信息。根據作業任務要求的不同,機器人的控制方式又可分為點位控制、連續軌跡控制和力控制。`
2017-08-09 16:30:09
有沒有大神能講一下動力學方程能不能用matlab進行傅里葉變換啊?
2024-10-11 09:11:04
分享一下水下機器人的電機控制(針對的是直流無刷電機+雙向電調的模式)。其實一句話就說明白了,頻率50hz的方波,1.5毫秒占空比是初始化;假如1~1.5毫秒正轉,1.5~2毫秒反轉,反之亦然。1.5
2021-09-16 08:43:15
分析ANSYS的基本功能介紹超彈性材料柔性手指的形變分析硅膠材料柔性機器人的形變分析五、靜、動力學分析實例軟體機器人運動學分析軟體機器人靜力學分析軟體機器人動力學分析與實例六、軟體爬行機器人設計仿真
2021-09-02 11:17:25
目的 本文手把手教你在 Mathematica 科學計算軟件中搭建機器人的仿真環境,具體包括以下內容: 1 導入機械臂的三維模型 2 正\逆運動學仿真 3 碰撞檢測 4 軌跡規劃 5 正\逆動力學仿真 6 運動控制 文中的代碼和模型文件點擊此處下載,
2021-09-07 07:38:54
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現實 (VR )環境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結果表明
2023-09-20 06:24:09
智能水下機器人在海洋石油開發、礦物資源開采、打撈和軍事等方面都有廣泛的應用前景[1][2][3]。水下機器人已經開始取代過去由載人潛器和潛水員所承擔的工作,尤其是在大深度和危險區域發揮了更大的優勢。
2019-10-29 07:22:16
小型四軸飛行器動力學參數是多少?
2013-10-15 18:56:20
、機器人專用語言、機器人運動學、動力學軟件、機器人控制軟件、機器人自診斷、白保護功能軟件等,它處理機器人工作過程中的全部信息和控制其全部動作。示教系統是機器人與人的交互接口,在示教過程中它將控制機器人
2017-12-15 10:25:19
的作用。 根據工業機器人的發展趨勢,本書在編寫內容上略有偏重。對工業機器人的運動學、動力學、基本控制系統等傳統內容的介紹比較簡潔;對機器視覺、機器聽覺和移動機器人的自主定位等新技術介紹較多,并以可重現
2015-02-03 10:51:09
氣體動力學在流量測量電子技術中的應用
2021-04-01 06:45:46
電力拖動系統的動力學課件電力拖動系統的動力學Dynamics of Electric Drive Systems1.了解電力拖動基本概念;2.熟悉電力拖動系統運動方程式;3.掌握拖動轉矩和負載轉矩
2008-11-19 22:14:17
請問各位在labview MathScript節點中 以下這個機器人的動力學公式應該怎么編寫呢?謝謝大家了!!
2017-11-16 19:22:42
從輪轂電機驅動電動汽車整車動力學特性、簧下質量增加對車輛動力學性能影響以及輪 轂電機不平衡電磁力對車輛動力學性能影響 3 個方面,介紹了 國 內外輪轂驅動電動汽車垂向動力 學研究現狀,對適用于
2025-03-07 15:21:37
飛行器動力學參數在線辨識EKF算法實驗流程飛行器俯仰通道動力學方程線性化飛行器俯仰通道動力學方程離散化線性卡爾曼濾波過程實驗流程??飛行器俯仰通道動力學微分方程是連續非線性方程,要進行擴展卡爾曼濾波
2021-08-27 06:06:16
針對自治水下機器人(AUV)所處的真實海洋環境,通過分析長距離航行時AUV局部規劃必須考慮的各種因素和可能產生的影響,設計一種局部規劃器的結構,提出基于模糊邏輯的解決方案
2009-04-18 09:50:42 32
32 熱分析動力學:本分析以熱分析動力學議程為主線,本書內容共分為三部分:第一部分包括熱分析動力學理論,方法和技術的回顧。兩類動力學議程和三類溫度積分式的數學的推導。
2009-12-01 14:46:300 本文介紹了一種基于單片機與觸摸屏的水下機器人便攜式遙控單元設計方法,主要包括便攜式遙控單元硬件結構、單片機與觸摸屏之間的通信以及遙控單元軟件設計等內容。通過該便
2010-02-23 13:53:4720 提出一種分層路徑規劃算法來解決大范圍海洋環境下的智能水下機器人(AUV)的全局路徑規劃問題。該算法將
2010-03-03 14:52:0118 空間柔性機器人動力學分析的快速積分算法:以空間柔性機器人為研究對象,分析了機器人柔性多體系統動力學建模過程,研究了根據廣義動力學方法所建立的大型微分-代數方程的
2010-03-18 16:24:1822 本書系統地介紹了機器人技術相關的基本知識,主要包括:緒論;機器人結構設計基礎;機器人操作手運動學;機器人操作手動力學;操作機器人關節伺服驅動技術;機器人控制;機器人傳感器。
2013-09-11 19:11:35146 分析了跨越式高壓輸電線路巡線作業機器人的結構特征,采用D-H法構建巡線機器人空間坐標,用Lagrange方法建立了機器人機械臂的動力學模型。基于此動力學模型,對一種典型工況進行了機械臂各關節動力學逆
2016-01-04 15:10:4922 水下機器人是建設海洋強國、捍衛國家安全和實現可持續發展必需的利器。我國水下機器人研制經過多年追趕,部分技術已與國外看齊,亟待進一步整合產業鏈條資源,積極推動水下機器人成果轉化,應對新一代全海深、全海域、組合化水下機器人研發。
2016-12-22 09:40:121506 自治水下機器人自適應滑膜控制_吳寶舉
2017-01-30 23:17:316 依靠NI myRIO控制的4塊鰭,敏捷的水下機器人Sepios能夠向6個方向移動 這個方案將向您演示一個采用NI MyRIO控制的4鰭水下機器人方案,這個由學生制造的Sepios水下機器人依靠4塊
2017-02-08 20:24:38903 機器人學:運動學、動力學與控制 -宋偉剛
全書共分10章。第1章介紹了機器人技術的發展及其種類、工作原理,機器人設計、控制與編程的基本方法。第2章和第3章介紹機器人機械 系統分析的數學、力學
2017-07-19 09:53:310 無人機來源于航模,航模有很多開源的項目,而水下機器人開源的項目非常少,如果要從事水下機器人的創業,很多設計都需要從零開始。
2017-09-22 07:29:2614900 隨著人工智能大潮的逐漸滲透,近年來各個國家對海洋資源越來越看重,紛紛加大了水下機器人的研發投入。美國、日本、法國作為最早一批研制水下機器人的國家,如今早已掌握了先進的水下機器人技術。
2017-09-27 15:10:421182 為了對閉環雙臂空間機器人本體位姿進行實時定位跟蹤,推導了基于旋量的遞推牛頓一歐拉運動學方程,結合自由漂浮空間機器人的線動量和角動量守恒理論,建立了基于空間算子代數理論的自由漂浮雙臂空間機器人閉環系統
2017-10-17 17:28:0916 自主式水下機器人(Autonomous Underwater Vehicles,AUV)代表了未來水下機器人技術的發展方向,是當前世界各國研究工作的熱點。對AUV的實時監測和控制是AUV能否安全高效
2017-10-25 11:46:351 針對傳統的機器人控制器設計容易受到水流沖擊壓力不定的因素干擾,導致控制器穩定性差、工作效率低下的問題。提出一種6 自由度下的水下機器人控制器抗干擾設計方法,通過水下機器人 自由度空間動力學方程,及其
2017-10-28 13:04:499 ) 為基礎, 對其航行控制和定位控制方法進行了較詳細的分析。 同時介紹了它的推進器布置、控制系統結構、推力分配等方法。最后展示了它的運行實驗結果。 近年來國外水下機器人技術發展迅速,技術水平較高。其中,具有代表性的
2017-11-12 09:43:1710 仿人靈巧手應用于中醫按摩領域,對手部的靈巧性有很高的要求,機器人動力學逆問題的研究旨在改善機器人控制系統工作的穩定性和控制精度,實現對靈巧手的最優控制,達到良好的動態性能和最優指標。 文中研究的對象
2017-11-16 14:20:4416 類比已經趨于成熟的空中無人機市場,水中機器人未來消費級市場規模可達百億級。在2015年,商業嗅覺敏銳的黃俊平看中了水下機器人這片藍海,組建了一個研發能力強、能根據市場反饋快速迭代的技術驅動型團隊,在
2017-11-30 15:57:207043 為了實現對水下機器人周圍環境的監測,提出了一種基于PC104與C8051F120的水下機器人環境監測系統設計方案,并完成系統的軟硬件設計。
2018-03-21 09:23:002820 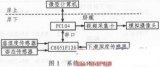
針對Delta機器人運動過程中因彈性變形導致的誤差問題,基于有限元理論對其彈性動力學問題建立了數學模型并進行了研究。根據機構特點,將機器人的各構件分別劃分為剛性體與彈性體,形成了一個剛柔結合的系統
2018-03-08 11:44:581 針對水下機器人進行水下檢測時的實時控制和監控問題,對水下機器人的推進器結構、運動方式、通訊方式、機體狀態顯示方式、運動控制方法等方面進行了研究,對水下機器人實現高效水下檢測所需的各功能需求進行了歸納
2018-03-14 15:36:246 隨著海洋資源的不斷開發,水下機器人作為一種先進的探索被不斷應用到該領域,得到了快速的發展以及高度的重視。
2018-07-25 17:11:008899 開架式通用水下機器人開源搭建手冊
2018-05-04 17:20:3314 從“上天”到“下海”,水下機器人作為機器人新形態的出現也為人工智能的發展拓寬了領域,而作為發展的新方向,其也應“大有可為”。
2018-05-26 10:35:0022279 水下機器人也稱無人遙控潛水器,是一種工作于水下的極限作業機器人。由于水下環境惡劣危險,人的潛水深度有限,所以水下機器人成為開發海洋的重要工具。水下機器人都有哪些鮮為人知的“十八般武藝”?一起來看看吧。
2018-07-07 09:28:3016537 美國科研人員正在利用人工智能幫助水下機器人適應各種極端環境,以完成勘察水中建筑安全狀況的任務。
2018-07-28 09:46:444054 近日,南方電網調峰調頻發電有限公司水下機器人項目完成最終驗收,該機器人能在水下隧洞遠距離航行檢測,可排查水工設施安全隱患,為后續水下作業提供支撐,大大降低電廠安全檢查成本,保障了電網的安全可靠運行。
2018-08-07 11:04:117964 水下環境復雜多變,性能優良、操作靈活的水下機器人是當今進行深海作業必需的設備。此次代表中國參賽的哈爾濱工程大學E唯協會的成員,帶著水下機器人第八次參賽。他們從2011年開始參加比賽,2012年獲得第四名,2013年第五名,2016年第六名,2017年第四名。
2018-08-08 15:12:535109 8月6日,第21屆國際水下機器人競賽在美國圣迭戈落幕,哈爾濱工程大學E唯代表隊奪得冠軍。這是我國高校首次在世界頂級水下機器人大賽中奪冠。
2018-08-08 16:43:405852 隨著技術的逐漸成熟和消費水平的提升,人們對水下領域的探測需求持續持續增長,民用水下機器人市場將持續穩定增長。數據顯示,2020年中國民用水下機器人市場規模將達到580.65億元,其中資源勘查類水下機器人
2018-08-16 14:34:5211833 水下機器人的工作環境是不同的水域,水下狀況多變,對機器人的技術要求提出了更高的挑戰。水下機器人制造技術密集性高,主要包括仿真、智能控制、水下目標探測與識別、水下定位、通信、能源系統六大技術。與發達國家相比,我國水下機器人制造的一些關鍵材料與技術研究領域仍有一定的差距,還需不斷發展突破。
2018-09-08 09:44:132056 據報道,當涉及到水下機器人時,基本上有兩種類型 - 在自行巡航時收集數據的自主水下航行器(AUV)以及可以在實時被控制并同時執行任務的遙控水下機器人 (ROV)。總部位于德克薩斯州的Houston Mechatronics公司的Aquanaut將上述兩種產品相結合。
2018-09-17 15:02:223698 日前,由我國自主研制的“海星6000”有纜遙控水下機器人完成首次科考應用任務,并在多個海域獲取了環境樣品和數據資料。期間,“海星6000”最大下潛深度突破6000米,再創我國有纜遙控水下機器人(ROV)的最大下潛深度紀錄。
2018-11-01 09:43:582652 本文結合水下機器人(ROV)在陽江核電廠取水口海生物監測中的應用實例,介紹了ROV的原理、系統組成、主要功能、作業流程,總結出國產水下機器人( ROV)用于核電廠冷源取水口海生物監測的優勢,同時展望水下機器人在我國核電行業應用的廣闊前景。
2019-05-08 09:38:427070 隨著人工智能的快速發展,在惡劣的工作環境下,用機器人替代人工的做法越來越廣泛,在2019數博會人工智能全球大賽武漢分賽區比賽中脫穎而出的大智若魚——子母型多功能水下機器人便是其中之一。
2019-05-16 10:32:111398 本屆智能水下機器人挑戰賽還將邀請水下智能機器人領域和海洋科技領域的國內外知名學者參加,圍繞國內外水下智能機器人領域的科技前沿、技術應用和發展方向等開展深入研討和交流,展示水下智能機器人領域的最新科技成果,本次參賽內容分為三大板塊。
2019-05-16 17:17:333621 6月26日,“2019中國(北京)消防技術與設備展覽會”在北京國家會議中心舉行,深之藍攜全系列水下機器人產品亮相。
2019-07-02 15:16:336203 利用人工智能幫助水下機器人適應各種極端環境,以完成勘察水中建筑安全狀況的任務。
2019-07-11 15:52:181351 水下機器人是高技術的集成,雖然水下機器人本體的各種材料及相關技術已基本成熟,但隨著水下機器人向大范圍、大深度、長續航、多功能的發展,一些關鍵技術還需研究解決
2019-07-17 16:15:2514033 中車株洲所旗下的SMD公司,在英國阿伯丁舉行的SPE Offshore Europe展會上,發布了一款具有超強作業能力、綠色環保工作級電驅動水下機器人(簡稱ROV)——QUANTUM/EV。
2019-09-05 09:36:261086 由于水下環境惡劣危險,人的潛水深度有限,所以水下機器人已成為開發海洋的重要工具。20世紀后半葉誕生的水下機器人,在機器人學領域屬于服務機器人中的特種機器人類別。
2019-12-26 10:36:553250 水下機器人是一種技術密集性高、系統性強的工程,隨著應用領域的不斷擴大,水下機器人會向著體積更小、兼容性更強、智能化程度更高的方向發展。
2020-01-24 16:59:001134 水下機器人在海洋開發、勘探水下環境以及未來水下戰爭中發揮著重要的作用,但是它的續航能力有限,因此在海底建設供電系統是十分有必要的。
2020-02-04 16:08:053017 韓國媒體稱,日前,韓國最大的集裝箱航運公司現代商船(HMM)宣布,計劃利用水下機器人清潔船體。
2020-03-04 08:49:10876 相對于陸地,人類在水下環境工作的困難程度和危險程度都要更高。特別是海洋環境更為復雜,也更容易遇到意外風險,所以一些水下作業用水下機器人取得人類來進行是必要的。
2020-05-10 15:14:55942 此次現場賽主要針對海洋環境監測、海上防險救生等需求,在真實開放的海洋環境條件下對水下機器人作業性能進行評測:針對水下機器人巡航與智能能力(感知、控制、驅動、通訊)進行考察
2020-06-10 16:20:132694 地球約有71%的面積覆蓋著水,在水下蘊藏著豐富的資源。但全球海洋的平均深度超過3000米,人類難以在此環境下長期生存,使用機器人來探索、開發這些水下資源成為一個更好的選擇。遙控水下機器人ROV是一種
2020-07-09 18:04:371115 隨著國內海洋石油工程、海洋科考、海洋打撈等領域對水下機器人使用需求的不斷擴大,相關政府部門在項目立項與實施方面水下機器人的產業化發展給予政策傾斜,未來我國水下機器人產業化、規模化進程將會進一步加快。
2020-08-18 10:04:344000 音圈模組水下機器人為生命護航。大家都知道海洋底有很多奇妙的神武等著我們去探索和發現,而且一些水底救援工作要開展,人們潛入到水底是很危險的事情,因此水下機器人就橫空出世了。是能代替人類作業的水下救援及巡檢機器人。
2021-03-24 14:49:001130 近期,武漢長江航道救助打撈局使用深之藍水下機器人完成一次2200米高海拔水下檢查項目。 該水電站位于黃河流域。主要任務是對水電站某機組進水口攔污柵、檢修閘門門槽及相關流道水下檢查,進口水快速閘門門槽
2021-04-09 17:06:302765 機器人原理與應用之機器人動力學教程免費下載。
2021-05-19 17:48:2043 Matlab_Simulink動力學系統建模與仿真01.pdf
2021-09-30 17:09:240 Matlab_Simulink動力學系統建模與仿真02.pdf
2021-09-30 17:10:190 水下機器人行業主要集中在北美、歐洲、中國、日本等國家和地區。目前,中國是最大的生產地區。從消費端來看,2018年中國水下機器人行業占全球銷量的25.07%,中國巨大的市場需求和增長潛力,吸引了幾乎所有國際巨頭在中國開展相關業務。
2022-06-08 11:35:228476 海洋包含著一片似乎無邊無際的有待探索的領土,在全球范圍內繪制這些未知水域的地圖是一項艱巨的任務。自主水下機器人艦隊可能是幫助繪制地圖的寶貴工具,但這些機器人需要能夠在保持高效和準確的同時導航這一雜亂的區域。
2022-08-23 10:15:422003 以多體動力學分析為例。機器人一般都包含多個可動的關節。為了讓機器人的工作表現達到預期目標,在設計階段就需要建立機器人的多體動力學數字樣機,來評估機器人的動力學、運動學特性。
2023-03-01 10:45:371753 下面分享某水下機器人供電干擾改善案例,從外圍電路中關鍵的接地部分出發,簡單分析故障干擾成因,簡化干擾傳播路徑模型并提出相應的改善方案。
2023-06-08 09:22:451579 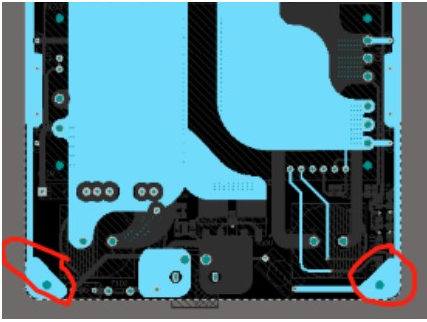
電子發燒友網站提供《水下機器人開源構建.zip》資料免費下載
2023-07-11 10:45:522 這個“長著三個觸角”的水下機器人看上去是不是很萌?它使用的是一種新型的由三個球形磁耦合矢量推進器組成的推進系統。與傳統的水下機器人使用多個固定推進器來實現多自由度(DOF)推進相比,矢量推進器具有多自由度、寄生推力小,以及效率高等優勢。
2023-08-24 11:21:412830 
基于車輛運動學模型的方法忽略了車輛的動力學特性,因此在 車速過快 或者 曲率變化率過大 的情況下該算法無法滿足車輛的穩定性控制要求。 這里介紹一種典型的基于車輛動力學模型的橫向控制方法,包括: 車輛
2023-11-15 16:47:481850 
機器人具有高度非線性,強時變以及強耦合等動力學特性,為了提高機器人控制的性能,研究人員提出了基于模型的控制(Model Based Control)方法。 在機器人研究領域,多種常見的高性能機器人
2023-11-17 17:43:551580 功率放大器模塊是一種電子設備,它可以將輸入信號的功率轉換為輸出信號的功率。在水下機器人中,功率放大器可以起到驅動電機、傳感器等負載的作用,是實現水下機器人功能的重要組成部分之一。下面將詳細介紹
2023-12-18 16:25:26894 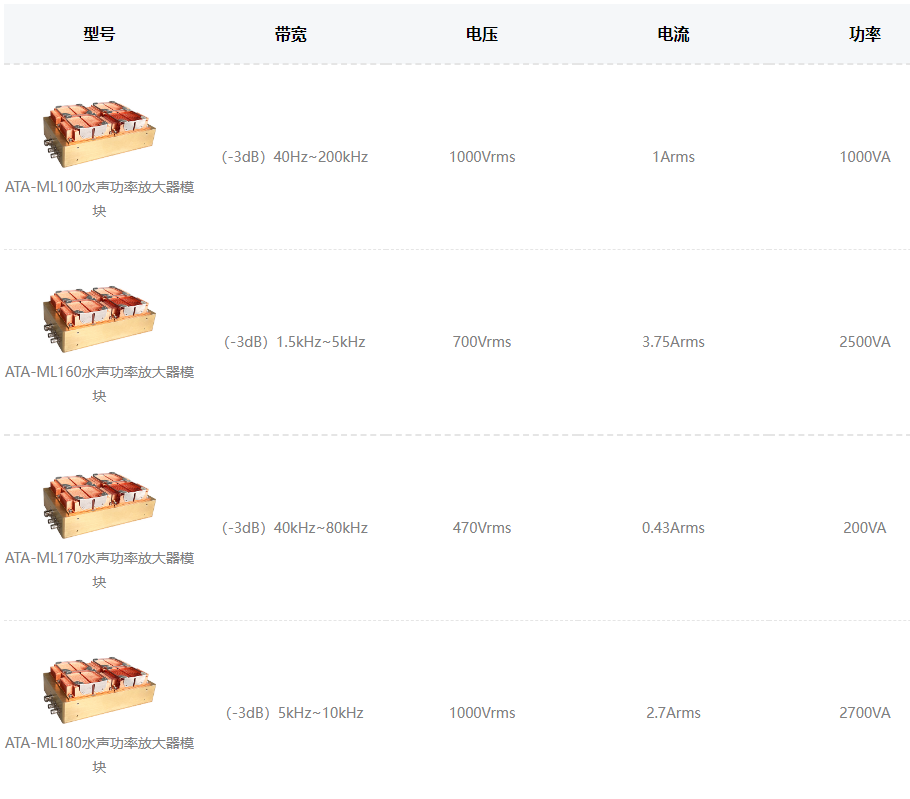
佛山智能裝備技術研究院(以下簡稱“智能裝備院”)在蛇年伊始迎來了“開門紅”,其機器人動力學研究取得了世界級突破!
2025-02-20 10:02:561121 
在此背景下,肇觀電子推出全球首創W系列水下機器人視覺模組,以光學視覺革命突破水下感知瓶頸!
2025-06-17 14:58:191264 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論